Visits: 5692 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований CAN 2.0B от 1991 года. Область применения CAN протокола: от высокоскоростных сетей связи до замены жгутов электропроводов в автомобиле. Высокая скорость передачи данных (до …
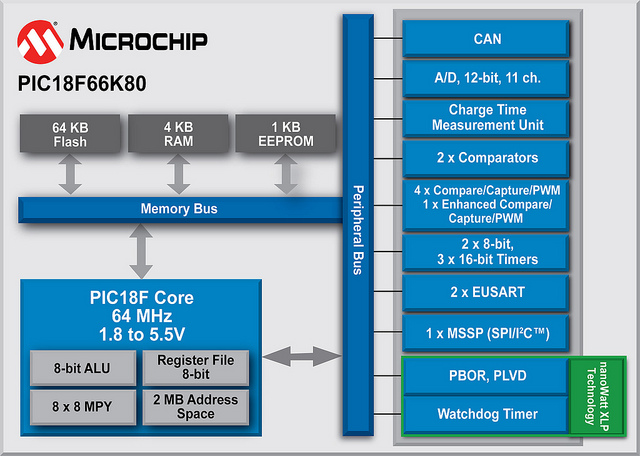
Читать далее Модуль CAN в микроконтроллерах PIC18
Рубрика:CAN
CAN – Controller Area Network
Visits: 1061 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, безопасными и экономичными при снижении веса жгутов проводов и их сложности. С момента своего создания, протокол CAN приобрел широкую популярность в области промышленной автоматизации и для грузовых автомобильных приложений. …
Читать далее CAN – Controller Area Network