Visits: 1115
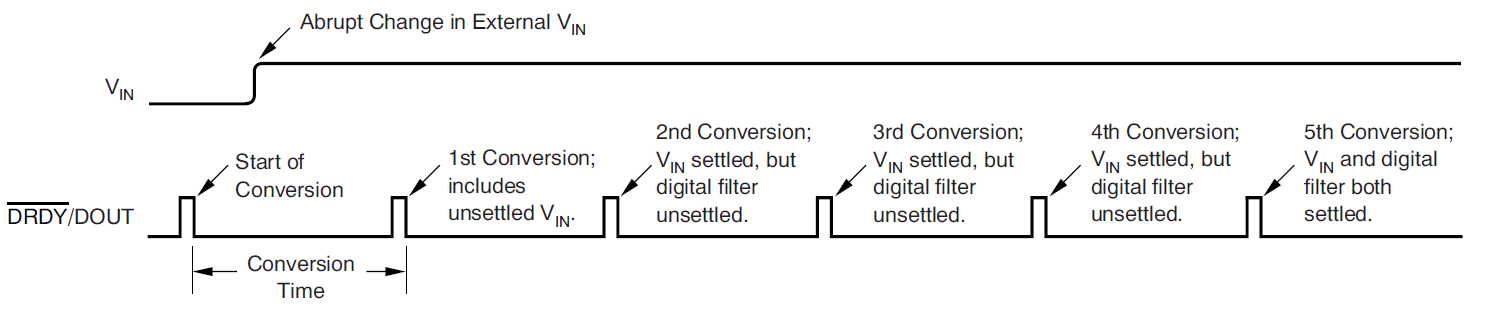
 АЦП ADS1230 – это 20 битный АЦП со скоростью измерения 10 или 80 раз в секунду. При подаче питания АЦП постоянно выполняет измерения. Данные можно получить с него по SPI шине. Максимальная тактовая частота шины до 1 мГц. Каждое измерение выполненное АЦП инициализируется самим АЦП по шине данных положительным импульсом. Чтение микроконтроллер должен начинать по получению отрицательного фронта.
АЦП ADS1230 – это 20 битный АЦП со скоростью измерения 10 или 80 раз в секунду. При подаче питания АЦП постоянно выполняет измерения. Данные можно получить с него по SPI шине. Максимальная тактовая частота шины до 1 мГц. Каждое измерение выполненное АЦП инициализируется самим АЦП по шине данных положительным импульсом. Чтение микроконтроллер должен начинать по получению отрицательного фронта.
Данные передаются старшим битом в перед для чтения 20 бит необходимо 3 байта. Данные выровнены влево.
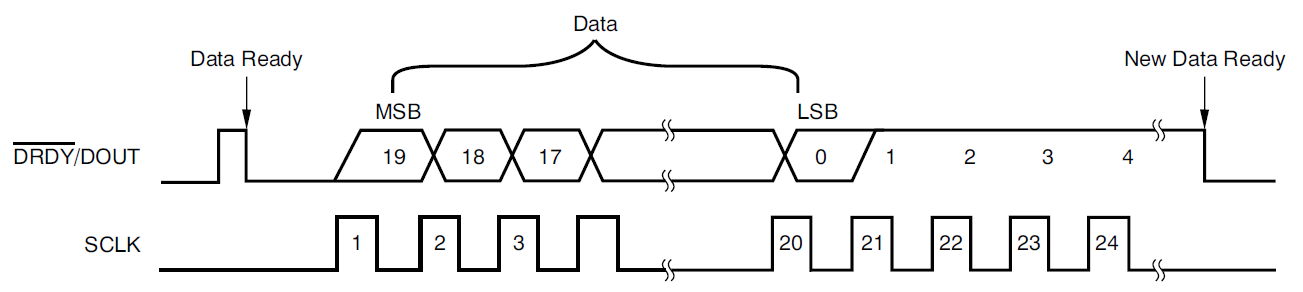
Для чтения данных необходимо настроить SPI по отрицательному фронту синхроимпульсов.
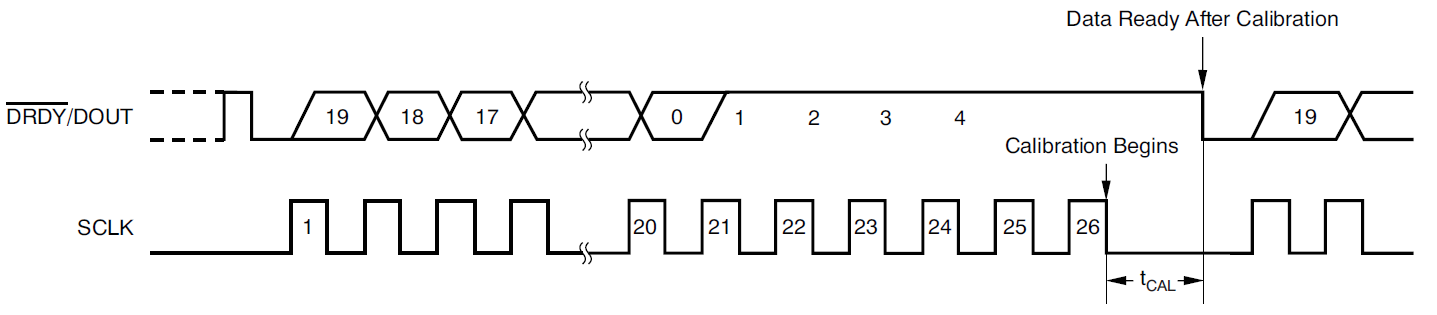
Управляя количеством синхроимпульсов можно управлять функциями АЦП, одна из них это калибровка АЦП.
Калибровки смещения
Калибровка смещения может быть начата в любое время для компенсации в ADS1230 погрешности смещения. Чтобы начать калибровку смещения, необходимо по крайней мере, два дополнительных SCLKs после получения 20 бит данных. Данные мы получаем чтением 24 бита. Если продолжить формирование SCLK, то задний фронт 26-го SCLK начинается цикл калибровки. Дополнительные импульсы SCLK могут быть отправлены после 26 SCLK, однако, активность на шине SCLK должны быть сведены к минимуму, во время калибровки смещения, для достижения наилучших результатов. В течение выполнения функции калибровки, аналоговые входные контакты отсоединены от входов АЦП и соответствующий сигнал подается внутри, чтобы выполнить калибровку. Когда калибровка завершена, DRDY/DOUT переходит в низкий уровень, что указывает, что новые данные готовы. Первое преобразование после калибровки содержит достоверные данные.
Стандартная схема подключения АЦП к мосту датчика для измерения веса.
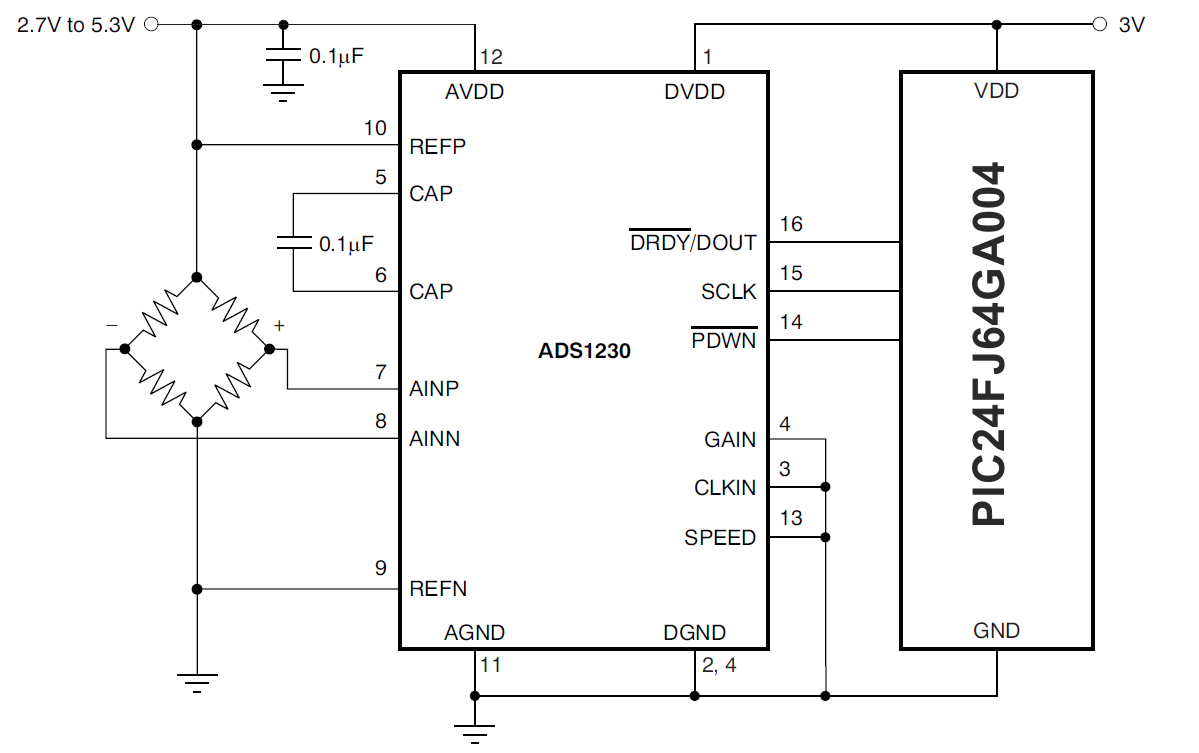
Вариант подключения АЦП к PIC24FJ64GA004.
Подключение будет выполнено к SPI2
void init_spi2 (void) // настройка SPI2
/* настраивается только на приём данных
* данные с АЦП
*/
{
/* SPI2 - настройка для работы с входным усилителем и индикатором
* PPRE
* 11 = Primary prescale 1:1
* 10 = Primary prescale 4:1
* 01 = Primary prescale 16:1
* 00 = Primary prescale 64:1
* SPRE
* 111 = Secondary prescale 1:1
* 110 = 2
* 101 = 3
* 100 = 4
* 011 = 5
* 010 = 6
* 001 = 7
* 000 = Secondary prescale 8:1*/
// RPOR4bits.RP9R=0b01001; // SPI2 Slave Select Output//CS
// RPOR6bits.RP12R=0b01010; // SPI2 Data Output
RPINR22bits.SDI2R = 20; // SPI2 Data Input - RP20/ нога 37
RPOR10bits.RP21R=11; // SPI2 Clock Output
SPI2STATbits.SPIEN = 0; // выключить
SPI2CON1 = 0b0000000000111001; //FCY/1/6=50/6=8,3
/* ||||||||||||||++--- PPRE<1:0>: настройка предделителя 1 11 = Primary prescale 4:1
* |||||||||||+++----- SPRE<2:0>: настройка предделителя 2 111 = Primary prescale 8:1
* ||||||||||+-------- MSTEN: 1 = Режим ведущего, 0 = режим ведомого
* |||||||||+--------- CKP:0 = пассивный уровень шины SCL 1- высокий, 0-низкий
* ||||||||+---------- SSEN:Slave Select Enable bit (Slave mode)
* |||||||+----------- CKE: смена бита данных происходит: 1-от активного в пассивное(синх-0/1)/0-пассивного в активное (синх-1/0)
* ||||||+------------ SMP:0 = Input data sampled at middle of data output time
* |||||+------------- MODE16: Communication is word-wide (8 bits)
* ||||+-------------- DISSDO: 0-в работе
* |||+--------------- DISSCK: 0-в работе
* +++---------------- не используются
*/
SPI2CON2 = 0b0000000000000000;
/* |||||||||||||||+--- не используется
* ||||||||||||||+---- FRMDLY:
* |||+++++++++++----- не используются
* ||+---------------- FRMPOL:
* |+----------------- SPIFSD:
* +------------------ FRMEN:
*/
SPI2STAT = 0b1000000000000000;
/* |||||||||||||||+--- SPIRBF: Флаг приемного буфера 1 - данные приняты 0- прием выполняется SPI2RXB пуст
* ||||||||||||||+---- SPITBF: Флаг передатчика 1 - передача не началась (буфер полон), 0 - передача началась буфер пуст (устанавливается сбрасывается аппаратно)
* ||||||||||++++----- не используются
* |||||||||+--------- SPIROV: 1 - произошло переполнение 0 - нет переполнения премного буфера.
* |||++++++---------- не используются
* ||+---------------- SPISIDL: режим работы в состоянии ожидания 0 - работает 1 - отключен модуль
* |+----------------- не используется
* +------------------ SPIEN: 1 - модуль включен 0 - выключен.
*/
SPI2STATbits.SPIEN = 1; // БИТ Включить - должен быть активирован последним, чтобы вступили в действии все изменения.
}
Сама обработка данных и синхронизация выполняется через прерывания по входу через которые на SPI2 поступают данные. Настройка прерывание:
void ADCIZ (void)// включить измерение
{
ADCVMOSST=1; // подать питание на датчик
ADCPDWN=1; // включить ADC
CNEN2bits.CN25IE=1; // разрешить прерывание по входу
_CNIF = 0; // сбросить прерывание
_CNIE = 1; // включить прерывание
}
Первые две строчки это если есть необходимость в управлении подачей питания на измерительный мост и управления режимом “слип” АЦП. Следующие три строки это настройка режима прерывания по входу через который АЦП получает данные.
Получение данных происходит через функцию прерывания:
void __attribute__((interrupt, auto_psv)) _CNInterrupt (void)
{
unsigned long datain;
_LATB2=!_LATB2; // индикация работы АЦП
while(PORTCbits.RC4); // ожидать низкого уровня на входе
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad]=datain<<16; // загрузка данных в буфер, сброс бита SPIRBF
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad]+=datain<<8; // загрузка данных в буфер, сброс бита SPIRBF
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad++]+=datain; // загрузка данных в буфер, сброс бита SPIRBF
if(ucazad==filtrADC)ucazad=0; // инициализация указателя.
//калибровка
if(Bit.calADC) // если установлен выполнить калибровку
{
Bit.calADC=0; // сбросить флаг калибровки
SPI2BUF=0; //
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF; // сброс бита SPIRBF
}
_CNIF = 0; // сброс прерывания
}
Флаг Bit.calADC – предназначен для активирования режима калибровки. Данные загружаются в буфер ADCbufer[] размер которого может быть ограничен переменной filtrADC.
Это может быть интересно
 LATINO – открытый проект ch-светомузыкиVisits: 1640 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была …
LATINO – открытый проект ch-светомузыкиVisits: 1640 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была … Мультимедийная сеть – AVC-LAN TOYOTAVisits: 5675 AVC LAN – протокол обмена данными мультимедийных систем автомобиля. Кодирование данных. При кодировании различаться три типа данных : преамбула – её назначение, это сообщение устройствам на шине, что начинается передача данных. …
Мультимедийная сеть – AVC-LAN TOYOTAVisits: 5675 AVC LAN – протокол обмена данными мультимедийных систем автомобиля. Кодирование данных. При кодировании различаться три типа данных : преамбула – её назначение, это сообщение устройствам на шине, что начинается передача данных. … MPLAB® Code Configurator and EncoderVisits: 1398 Еще раз про энкодер… Для некоторых приложений очень удобно и экономически выгодно, для настройки и управления использовать энкодер. Такие энкодеры имеют строенную тактовую кнопку которую можно применить для выбора …
MPLAB® Code Configurator and EncoderVisits: 1398 Еще раз про энкодер… Для некоторых приложений очень удобно и экономически выгодно, для настройки и управления использовать энкодер. Такие энкодеры имеют строенную тактовую кнопку которую можно применить для выбора … Простой цифровой милливольтметр постоянного токаVisits: 4032 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля …
Простой цифровой милливольтметр постоянного токаVisits: 4032 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля … TDA7294 part 2Visits: 243 Це друга частина проекту TDA7294, початок дивись тут. Тут ви знайдете повністю проект високоякісного підсилювача на TDA7294, схема, 3D моделі, гербер файли для виготовлення друкованої плати. І звичайно …
TDA7294 part 2Visits: 243 Це друга частина проекту TDA7294, початок дивись тут. Тут ви знайдете повністю проект високоякісного підсилювача на TDA7294, схема, 3D моделі, гербер файли для виготовлення друкованої плати. І звичайно … Простой цифровой регулятор мощностиVisits: 6406 Простой регулятор мощности с цифровой индикацией. Этот проект создан как обучающий, для ознакомления с основами построения сетевых регуляторов мощности. Устройства подобного типа можно использовать для управления освещением, скоростью …
Простой цифровой регулятор мощностиVisits: 6406 Простой регулятор мощности с цифровой индикацией. Этот проект создан как обучающий, для ознакомления с основами построения сетевых регуляторов мощности. Устройства подобного типа можно использовать для управления освещением, скоростью … PIC32MZ – Core Timer (библиотека)Visits: 531 Переработанные файлы от Microchip, библиотека для работы с Core Timer.
PIC32MZ – Core Timer (библиотека)Visits: 531 Переработанные файлы от Microchip, библиотека для работы с Core Timer. ch-4050 – дифференциальный терморегуляторVisits: 1846 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя …
ch-4050 – дифференциальный терморегуляторVisits: 1846 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя … Применение typedef, struct и unionVisits: 8700 Полезные описания переменных Часто необходимо в памяти расположить последовательно разные виды данных, что бы потом можно было их использовать. Полезные ссылки Взято и переработано с сайта http://www.butovo.com/~zss/cpp/struct.htm http://cppstudio.com/post/9172/ …
Применение typedef, struct и unionVisits: 8700 Полезные описания переменных Часто необходимо в памяти расположить последовательно разные виды данных, что бы потом можно было их использовать. Полезные ссылки Взято и переработано с сайта http://www.butovo.com/~zss/cpp/struct.htm http://cppstudio.com/post/9172/ … ch-4060 – регулятор температуры и влажности на датчике DHT11/DHT22/AM2302Visits: 2406 На плате ch-4000 очень легко собрать устройство регулятора температуры и влажности. Датчик DHT11 самый недорогой вариант для создания такого устройства, правда точность его не велика, но для бытовых устройств …
ch-4060 – регулятор температуры и влажности на датчике DHT11/DHT22/AM2302Visits: 2406 На плате ch-4000 очень легко собрать устройство регулятора температуры и влажности. Датчик DHT11 самый недорогой вариант для создания такого устройства, правда точность его не велика, но для бытовых устройств …