
Visits: 1515
Принцип построения управления аналоговым сервоприводом от PIC-контроллера.
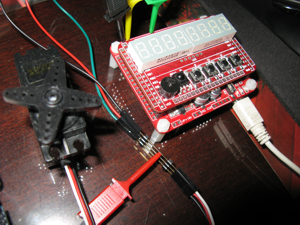
 Подключение аналогового сервопривода выполняется по трем проводам:
Подключение аналогового сервопривода выполняется по трем проводам:
- черный (коричневый) – общий.
- красный – питание (4,8-6,0 Вольт).
- белый (желтый) – управление.
Сервопривод позволяет поворачивать вал до 180 градусов. Для управления необходимо на белом проводе сформировать управляющие импульсы длительностью от 1 до 2 миллисекунд с периодом 20 миллисекунд. Длительность импульса управления от 1 до 2 мс – это стандартные параметры и реально могут отличаться для выполнения полного вращения вала (на 180º), но на практике для управления исполнительными механизмами применяется меньшие углы. Период тоже понятие относительное и от может быть как меньше так и больше, все зависит от параметров системы управления и самого выбранного привода.
Удобно для управления использовать CCP модули микроконтроллера. В новых современных моделях (например, PIC16F1936) их количество достигает 6. Это количество модулей достаточно для создания полноценных устройств управления моделями, роботами…
CCP-модуль позволяет создавать независимые ШИМ которые могут с успехом управлять аналоговыми (и цифровыми) приводами.
 При настройке CCP модуля в режиме ШИМ нам доступно 10 бит управления длительностью. Для управления длительностью необходимо загружать числовое значение в регистр CCPRxL (8 бит) и младшие биты (0-1) в регистр CCPxCON. В режиме ШИМ CCP модуль работает совместно с таймерами TMP2/4/6. Эти таймеры формируют период ШИМ. Формируемая длительность тесно завязана с тактовой частотой микроконтроллера и для аналогового привода придется задавать более низкую тактовую частоту что не всегда приемлемо для быстродействия системы управления.
При настройке CCP модуля в режиме ШИМ нам доступно 10 бит управления длительностью. Для управления длительностью необходимо загружать числовое значение в регистр CCPRxL (8 бит) и младшие биты (0-1) в регистр CCPxCON. В режиме ШИМ CCP модуль работает совместно с таймерами TMP2/4/6. Эти таймеры формируют период ШИМ. Формируемая длительность тесно завязана с тактовой частотой микроконтроллера и для аналогового привода придется задавать более низкую тактовую частоту что не всегда приемлемо для быстродействия системы управления.
Таймер имеет следующую структуру:

На вход поступает тактовая частота деленная на 4, после этого идет предделитель и сам таймер, с регистром периода. Нам необходимо сформировать период с длительностью близко к 20 мс. 20 мс – это частота на 50 Гц. Высчитаем приемлемую тактовую частоту: как это сделать? Необходимо
- требуемую частоту (50 Гц) умножить на величину делителя таймера (256, значение берем максимальные, для получения максимальность тактовой часты).
- далее умножаем на максимальное значение предделителя 64.
- потом на 4 (входная тактовая от частоты задающего генератора контроллера)
50*256*64*4=3276800
Мы получили тактовую больше трех мегагерц, выберем 4 (из стандартного ряда внутреннего генератора)
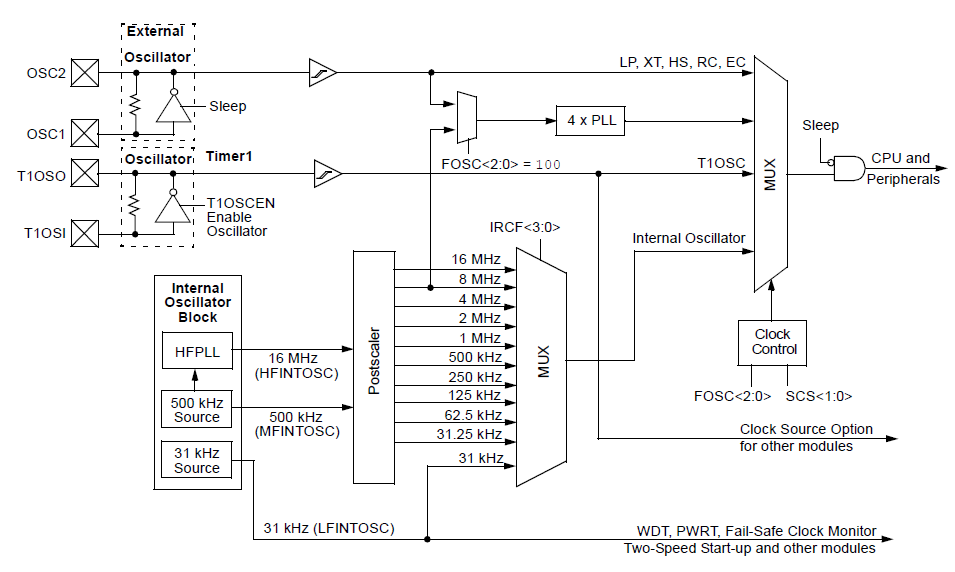
Проверим при заданной тактовой какая у нас будет длительность периода
Период = 1/(4000000/4/64/256) = 1/60 = 16 мс.
Получаем 60 герц на выходе это где то 16 мс. Для нашего привода S3003 это в приемлемом допуске.
Настройка тактового генератора в программе
// настройка генератора 4мГц
OSCCON=0b01101000;
// ||||||||
// ||||| ++-- SCS<1:0> основной генератор (работа через PLL)
// |++++----- IRCF<3:0> 1101 = 4 MHz HF
// +--------- SPLLEN умножитель 0-отключен, 1-включен
Настройка модуля CCP и таймера TMP2 в режиме ШИМ.
CCP1CON=0b00001100; // настройка модуля в режиме шим T2CON=0b00000111; // настройка таймера PR2=255; // задание периода ШИМ CCPR1L=0; // очистка регистра длительности =0
Теперь для управления сервоприводом необходимо определиться со значениями загружаемыми в CCP модуль для формирования длительности импульса в пределах 1-2 мс.
Дискретность длительности формируемого ШИМ рассчитать просто. Если период 16 мс, то 16/1024 (10 разрядный ШИМ) получаем 0,016 мс. Для формирования длительности импульса в 1 мс необходимо загрузить число 1/0,016=62, а для формирования длительности 2 мс = 125. Но это все теоретические выкладки (но они конечно тоже будут работать и формировать вращение вала на угол в 90%). Но если необходимо будет подобрать больший угол поворота, то необходим экспериментальный подход. В моем приводе максимальный угол поворота близкий к 180 градусам формируется при подаче длительностей в диапазоне от 0,63 мс до 2,23 мс.


При этом максимальное и минимально значение записываемое в ШИМ составляет 40 – 140.
Для удобство управления, проще вводить (как мне кажется) данные в процентах. Т.е. привод в крайнем “левом” положении 0%, посредине – 50%, кране “правое” – 100%.
В программе введем константы
#define max_p 140; // масимальный параметр в шим соответствующий 2 мС #define min_p 40; // минимаотный параметр соответствующий 1 мС
они нам дадут возможность более гибко подходить к настройке привода. а также две переменные коэффициент для пересчета и управляющий параметр в процентах:
char koef; //коэффициент преобразования char polog; // положение в процентах от 0-100%
вычисление коэффициента сделаем при инициализации программы один раз
koef=max_p; // koef=koef - min_p; // koef=(koef*10)/100; //
а для загрузки значения в ШИМ для формирования управляющих импульсов
//преобразование процентов в значение для загрузки в ШИМ pwm_reg=((koef*polog)/10)+min_p; pwm_reg2=pwm_reg<<6; // pwm_reg2=pwm_reg2>>2; // CCP1CON &= 0b11001111; // CCP1CON |= pwm_reg2; // CCPR1L=pwm_reg>>2; //
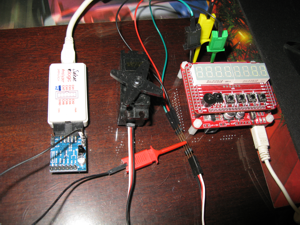
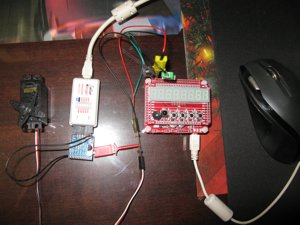
Для тестирования возьмем плату ILLISSI-B4-03-primum с контроллером PIC16F1936. А для управления и индикации плату ILLISSI-4С-01-secundo.
Подключение сервопривода к плате ИЛЛИССИ-4В
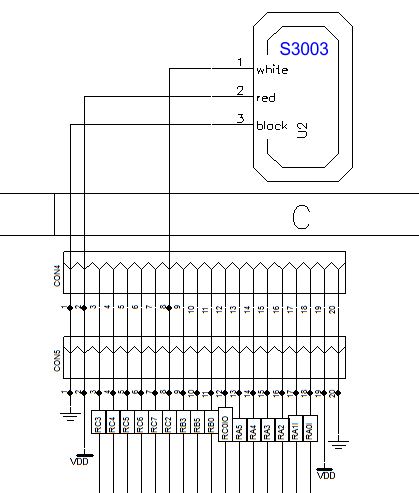
Фото демопроекта

Видео работы демонстрации работы сервопривода.
Файлы проекта
[box title=”Файлы для загрузки” color=”#521BDE”]Компилятор HI-TECH C Compiler for PIC10/12/16 MCUs (PRO Mode) V9.83, MPLAB 8.88.[wpdm_file id=72][/box]
Это может быть интересно
 AD9833 – Programmable Waveform Generator – part twoVisits: 1662 Прошло время и появилась тема, что-бы закончить проект AD9833 – Programmable Waveform Generator. Приехали печатные платы. В этот раз я печатные платы заказывал в https://jlcpcb.com/ делал это в …
AD9833 – Programmable Waveform Generator – part twoVisits: 1662 Прошло время и появилась тема, что-бы закончить проект AD9833 – Programmable Waveform Generator. Приехали печатные платы. В этот раз я печатные платы заказывал в https://jlcpcb.com/ делал это в … Модуль CAN в микроконтроллерах PIC18Visits: 5694 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований …
Модуль CAN в микроконтроллерах PIC18Visits: 5694 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований … 12-BIT A/D CONVERTER WITH THRESHOLD DETECT на примере PIC24FJ128GA204Visits: 805 Введение. 12-битный модуль A/D Converter является усовершенствованной версией 10-битного модуля, предлагаемого на некоторых устройствах PIC24. Оба модуля являются преобразователями, в своих ядрах, с последовательным приближением (SAR), в окружении …
12-BIT A/D CONVERTER WITH THRESHOLD DETECT на примере PIC24FJ128GA204Visits: 805 Введение. 12-битный модуль A/D Converter является усовершенствованной версией 10-битного модуля, предлагаемого на некоторых устройствах PIC24. Оба модуля являются преобразователями, в своих ядрах, с последовательным приближением (SAR), в окружении … LED драйвер TM1639Visits: 2153 TМ1639 позволяет работать на матрицу 8*8 или 8 семисегметных индикаторов. Может работать как на индикаторы с общим катодом, но и есть возможность подключать общим анодом. Для управления драйвером …
LED драйвер TM1639Visits: 2153 TМ1639 позволяет работать на матрицу 8*8 или 8 семисегметных индикаторов. Может работать как на индикаторы с общим катодом, но и есть возможность подключать общим анодом. Для управления драйвером … MCC PIC24 – модуль OUTPUT COMPARE – в режиме генератора звуковых сигналовVisits: 600 При проектировании простых устройств автоматики, часто необходимо иметь механизм звукового оповещения. Самый верхний уровень, это формирование голосовых сообщений, но об этом, как то по позже… В самом примитивном …
MCC PIC24 – модуль OUTPUT COMPARE – в режиме генератора звуковых сигналовVisits: 600 При проектировании простых устройств автоматики, часто необходимо иметь механизм звукового оповещения. Самый верхний уровень, это формирование голосовых сообщений, но об этом, как то по позже… В самом примитивном … Kitchen timer with contactless gesture controlVisits: 515 Кухонний таймер з безконтактним керуванням жестами дозволяє встановити необхідний період часу для приготування страв, не торкаючись пристрою. Дуже зручно під час приготування їжі, коли руки забрудниться. Усі …
Kitchen timer with contactless gesture controlVisits: 515 Кухонний таймер з безконтактним керуванням жестами дозволяє встановити необхідний період часу для приготування страв, не торкаючись пристрою. Дуже зручно під час приготування їжі, коли руки забрудниться. Усі … MPLAB X IDE – управление проектамиVisits: 909 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора …
MPLAB X IDE – управление проектамиVisits: 909 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора … Система отопления на солнечных коллекторах от Дмитрия (rv3dpi)Visits: 3179 Солнечные коллекторы для отопления в Европе используют в более 50% от общего количества установленных гелиосистем. Однако следует понимать, что гелиосистемы предназначены лишь для поддержки отопления и экономии затрат на основную …
Система отопления на солнечных коллекторах от Дмитрия (rv3dpi)Visits: 3179 Солнечные коллекторы для отопления в Европе используют в более 50% от общего количества установленных гелиосистем. Однако следует понимать, что гелиосистемы предназначены лишь для поддержки отопления и экономии затрат на основную … Тестирование модуля генератораVisits: 825 Тестирование модуля генератора Настройка, запуск и проверка рабочей частоты на примере PIC18F26K40. PIC18F26K40 Чтобы понять из-за чего зависит производительность микроконтроллера просто надо понять как работает его задающий тактовый …
Тестирование модуля генератораVisits: 825 Тестирование модуля генератора Настройка, запуск и проверка рабочей частоты на примере PIC18F26K40. PIC18F26K40 Чтобы понять из-за чего зависит производительность микроконтроллера просто надо понять как работает его задающий тактовый … LED модуль P10C4V12Visits: 3069 LED панели на обычных регистрах типа 74HC595. Они выпускаются как монохромные так двух и полно цветные, особенность, что они предназначены для текстовой информации и имеют один уровень яркости. Общую яркость …
LED модуль P10C4V12Visits: 3069 LED панели на обычных регистрах типа 74HC595. Они выпускаются как монохромные так двух и полно цветные, особенность, что они предназначены для текстовой информации и имеют один уровень яркости. Общую яркость …