
Views: 3744
Технология обновления следующая:
- Загружаем программу со страницы espressif.com.
- Разархивируем.
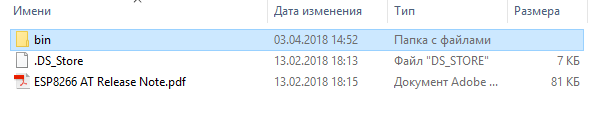
- Где находятся файлы, для прошивки? Заходим в каталоги
- Где находятся файлы, для прошивки? Заходим в каталоги
- Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка).
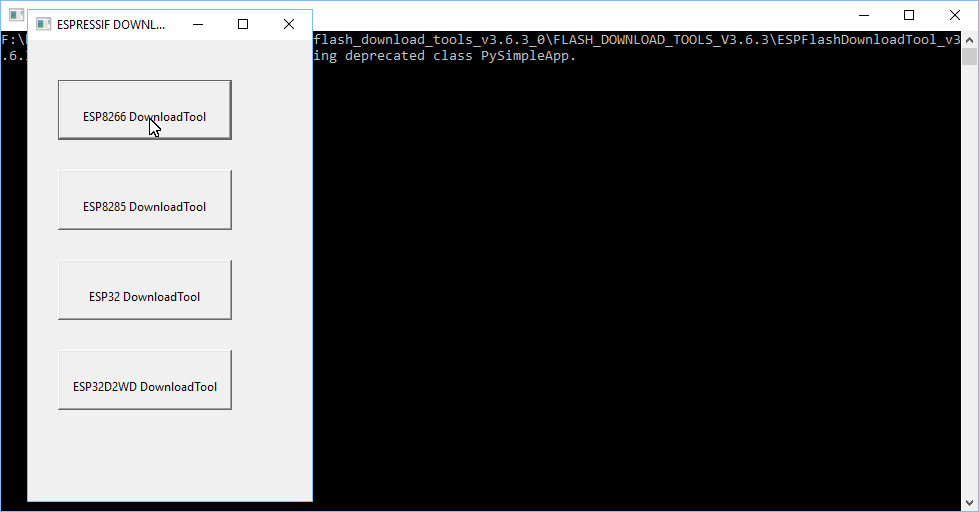
- Запускаем программу, откроется два окна.
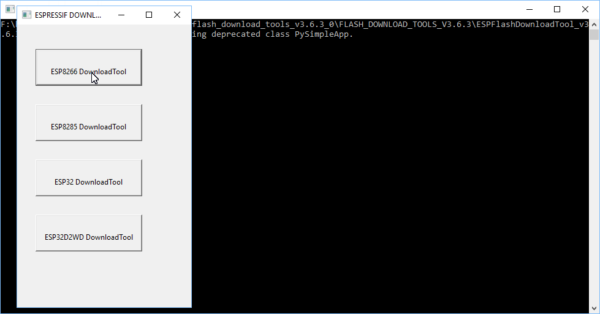
- Выбираем ESP8266.
- Откроется окно.
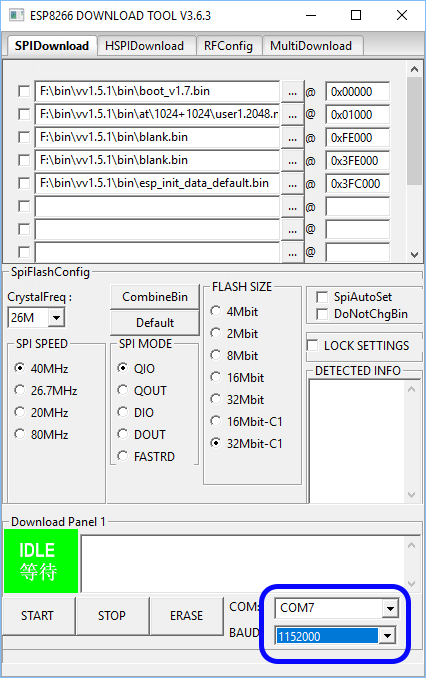
- Выберем компорт к которому подключен модуль (через адаптер).
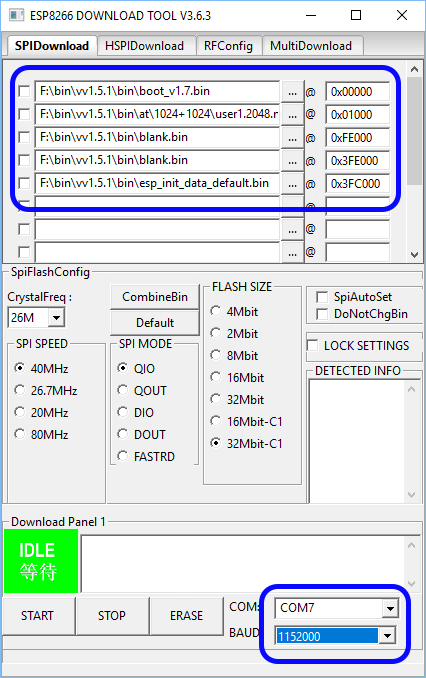
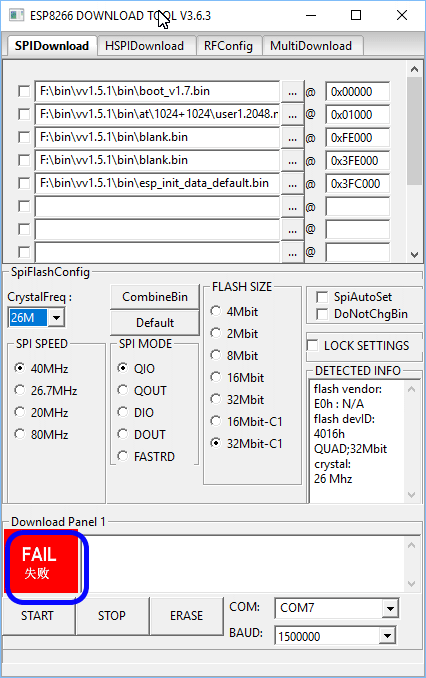
- Настроем файлы для загрузки, но снимем галочки, для тестирования подключения.
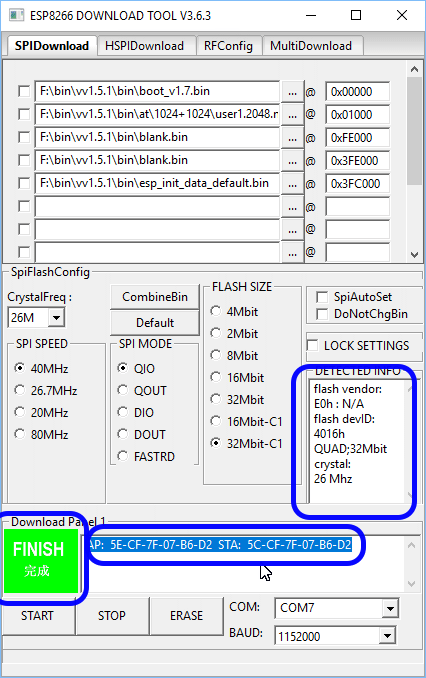
- Выполним сброс модуля (перед началом обновления обязательно), при этом светодиод (если он есть, моргнет 1 раз), Нажмите кнопку START если загрузчик “новый” вы полниться чтение модуля. И вы увидите, параметры модуля:
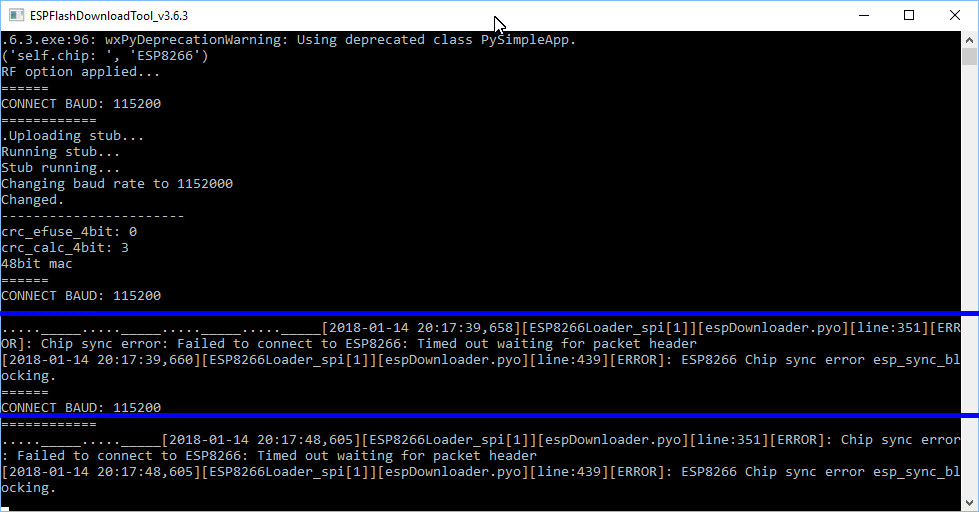
- Но иногда связь не выполняется, в результате чего это происходит? Это происходить, что бутлоадер запускается на скорости 78880, а потом программа должна перехватить связь и настроить на скорость которая задана в окне под компортом, в зависимости от USB-com моста можно выставить приемлемую скорость например, у меня стоить 1,15 Мбит! Если связь не устанавливается и в окне msdos мы видим сообщение:
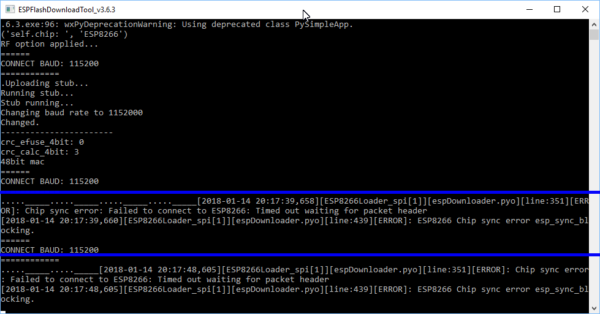 А в окне программы сообщение:
А в окне программы сообщение:
Необходимо нажать кнопку START и после этого выполнить сброс модуля. - После этого установите галочки и повторите операцию подхвата обновления.
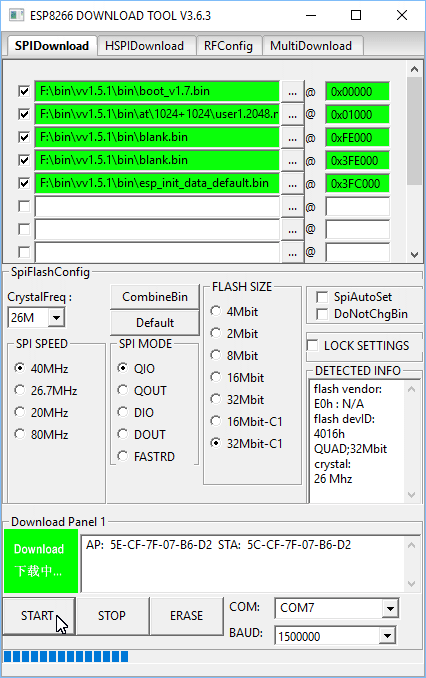
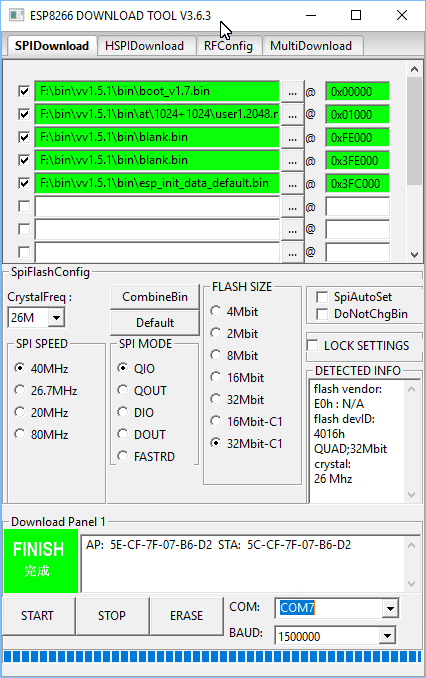
- Внизу появится индикатор обновления прошивки. По окончанию будет сообщение:
- Снимите перемычку, бутлоадера выполним, сброс, светодиод моргнет 2-3 раза (зависит от прошивки). Проверим обновление, введем команду AT+GMR (нажмите энтер, для формирование в конце “невидимых” перевод строки и возврат каретки):
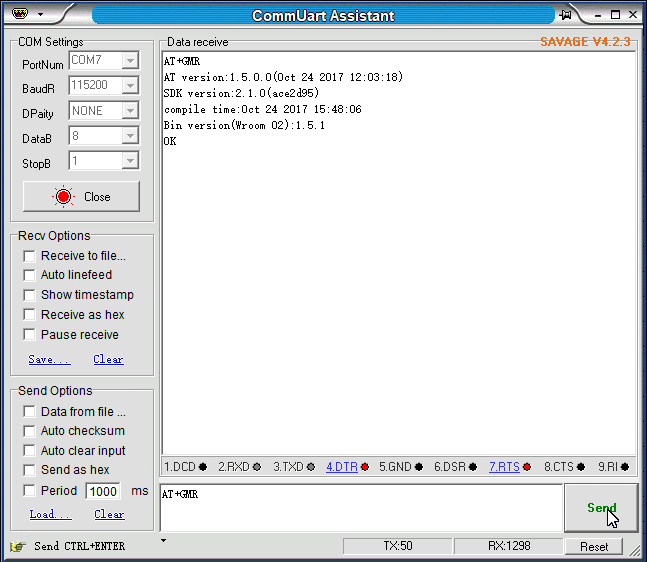
- Получим сообщение о версии:



AT+GMR
AT version:1.5.0.0(Oct 24 2017 12:03:18)
SDK version:2.1.0(ace2d95)
compile time:Oct 24 2017 15:48:06
Bin version(Wroom 02):1.5.1
OK
На сегодня последняя версия 09/02/18
AT+GMR
AT version:1.6.0.0(Feb 3 2018 12:00:06)
SDK version:2.2.0(f28eaf2)
compile time:Feb 6 2018 14:36:25
Bin version(Wroom 02):1.6.0
OK
Пробуем обновление!
Это может быть интересно
 УКВ – радиоприем, часть 2Views: 6445 Пришло свободное время решил вторую часть проекта реализовать (правда есть мысль и третью с использование цветного OLED и функцией ch-светомузыки, но это только задумка… Для понимания функций интегрального …
УКВ – радиоприем, часть 2Views: 6445 Пришло свободное время решил вторую часть проекта реализовать (правда есть мысль и третью с использование цветного OLED и функцией ch-светомузыки, но это только задумка… Для понимания функций интегрального … Customs codes for exportViews: 385 Митні коди (HS Code) для надсилання посилок за кордон. Для відправки товару за кордон на сьогодні необхідно зазначати митні коди. Часто визначення коду займає багато часу. Для …
Customs codes for exportViews: 385 Митні коди (HS Code) для надсилання посилок за кордон. Для відправки товару за кордон на сьогодні необхідно зазначати митні коди. Часто визначення коду займає багато часу. Для … LCD драйвер – UC1601sViews: 1836 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG.
LCD драйвер – UC1601sViews: 1836 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG. Дифференциальный терморегуляторViews: 4164 Дифференциальный терморегулятор ch-3020 Назначение. Ch-c3020 представляет собой дифференциальный терморегулятор. Основное назначение солнечные системы горячего водоснабжения, а также вентиляционные системы управление притоком свежего воздуха. Контроллер позволяет работать пяти режимах. …
Дифференциальный терморегуляторViews: 4164 Дифференциальный терморегулятор ch-3020 Назначение. Ch-c3020 представляет собой дифференциальный терморегулятор. Основное назначение солнечные системы горячего водоснабжения, а также вентиляционные системы управление притоком свежего воздуха. Контроллер позволяет работать пяти режимах. … AD9833 – Programmable Waveform Generator – part twoViews: 1969 Прошло время и появилась тема, что-бы закончить проект AD9833 – Programmable Waveform Generator. Приехали печатные платы. В этот раз я печатные платы заказывал в https://jlcpcb.com/ делал это в …
AD9833 – Programmable Waveform Generator – part twoViews: 1969 Прошло время и появилась тема, что-бы закончить проект AD9833 – Programmable Waveform Generator. Приехали печатные платы. В этот раз я печатные платы заказывал в https://jlcpcb.com/ делал это в … DIXELL XWEB500D-EVO + RUT900 или как пробить NAT-серверViews: 1210 Когда необходимо под какой нибудь контроллер имеющий вэб сервер в инет, то нужен статический IP, что оказалось проблемой при работе с операторами сотовых сетей, конкретно с оператором сети …
DIXELL XWEB500D-EVO + RUT900 или как пробить NAT-серверViews: 1210 Когда необходимо под какой нибудь контроллер имеющий вэб сервер в инет, то нужен статический IP, что оказалось проблемой при работе с операторами сотовых сетей, конкретно с оператором сети … Real-time music visualization technologyViews: 380 Music visualization technology in real time (RTMV-technology). Я не музикант і я не маю спеціальної музичної освіти, я інженер розробник вбудованих систем. Але моє хобі розроблення технології візуалізації …
Real-time music visualization technologyViews: 380 Music visualization technology in real time (RTMV-technology). Я не музикант і я не маю спеціальної музичної освіти, я інженер розробник вбудованих систем. Але моє хобі розроблення технології візуалізації … LCD индикаторы на драйвере ML1001Views: 2063 ML1001 – статический LCD GOG (чип в стекле) драйвер для 40-сегментного LCD в позолоченном противоударном исполнении. На них можно каскадно строить цельные из 80 или 120 сегментов LCD индикаторы. …
LCD индикаторы на драйвере ML1001Views: 2063 ML1001 – статический LCD GOG (чип в стекле) драйвер для 40-сегментного LCD в позолоченном противоударном исполнении. На них можно каскадно строить цельные из 80 или 120 сегментов LCD индикаторы. … Проект с использованием MCC часть 12-2Views: 1227 Настало время для изучения шины I2C. Изучать будем на примере работы с индикатором RET012864E. Что изменили со старой схемы: В прошлой теме я затупил и не добавил подтягивающие резисторы …
Проект с использованием MCC часть 12-2Views: 1227 Настало время для изучения шины I2C. Изучать будем на примере работы с индикатором RET012864E. Что изменили со старой схемы: В прошлой теме я затупил и не добавил подтягивающие резисторы … Проект с использованием MCC часть 13Views: 1261 Так как используя MCC мы можем его использовать со своими библиотеками, поэтому настало время и свое создать. Для начала откроем наш заголовочный файл в нем очень много букв: По …
Проект с использованием MCC часть 13Views: 1261 Так как используя MCC мы можем его использовать со своими библиотеками, поэтому настало время и свое создать. Для начала откроем наш заголовочный файл в нем очень много букв: По …