
Views: 604
Модуль I2C
Не работает при использовании в стандартной конфигурации MCC. Требует особой нестандартной конфигурации и управления для нормальной работы.
Обойти
Обход проблемы возможен библиотека см статью.
Модуль ADC2
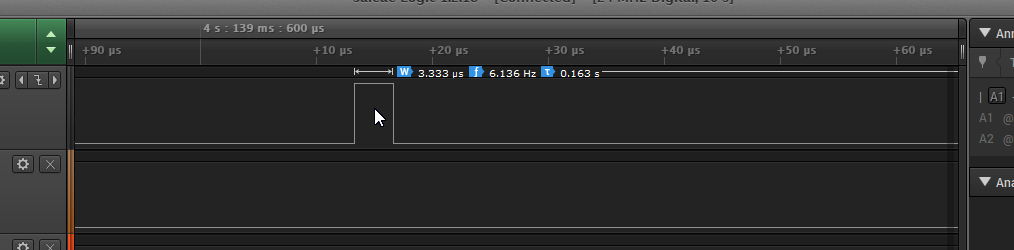
На выводе RA0, когда он настроен как цифровой выход, при выборе канала 0 в регистре ADPCH=0 появляются импульсы выборки с заданной длительностью.
Настройка портов: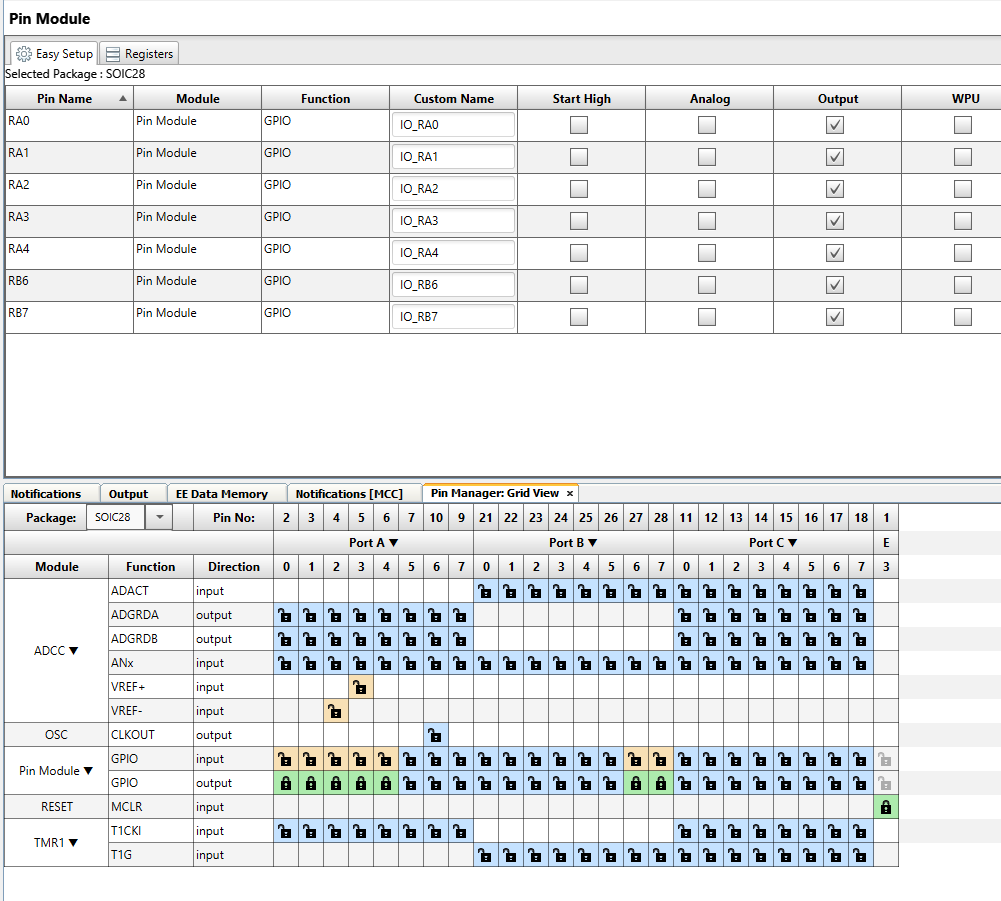
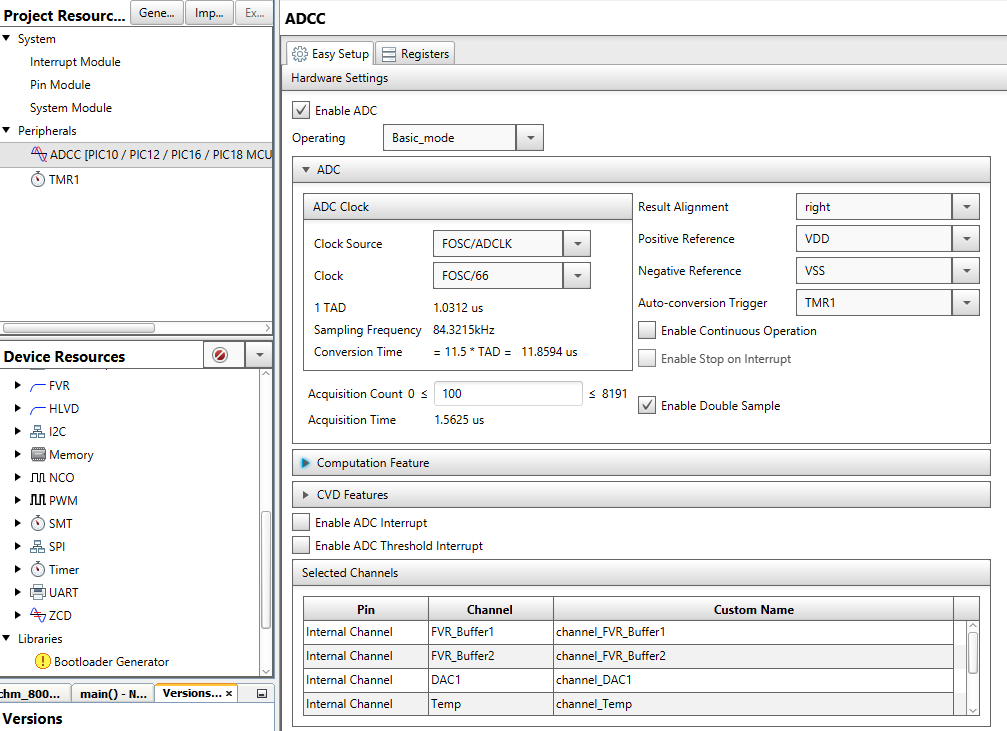
Настройка АЦП:
Выявленный баг, положительные импульсы на выводе RA0, когда он настроен как цифровой порт на вывод и когда ADPCH=0, при конвертировании на этом выходе формируется строб.
Обойти
Для нормального использования вывода RA0 в цифровом виде, надо исключить возможное состояние ADPCH=0 в программе работы ADC.
Это может быть интересно
 Дифференциальный терморегуляторViews: 3993 Дифференциальный терморегулятор ch-3020 Назначение. Ch-c3020 представляет собой дифференциальный терморегулятор. Основное назначение солнечные системы горячего водоснабжения, а также вентиляционные системы управление притоком свежего воздуха. Контроллер позволяет работать пяти режимах. …
Дифференциальный терморегуляторViews: 3993 Дифференциальный терморегулятор ch-3020 Назначение. Ch-c3020 представляет собой дифференциальный терморегулятор. Основное назначение солнечные системы горячего водоснабжения, а также вентиляционные системы управление притоком свежего воздуха. Контроллер позволяет работать пяти режимах. … Контроллер управления светодиодным освещением с дистанционным управлениемViews: 2007 Все активнее светодиоды входят в нашу жизнь. Всё эффективнее становится светодиодное освещение. Всё ниже опускаются цены. Всё больше появляется возможностей получения сочных цветов, простоты в управлении. Всё чаще …
Контроллер управления светодиодным освещением с дистанционным управлениемViews: 2007 Все активнее светодиоды входят в нашу жизнь. Всё эффективнее становится светодиодное освещение. Всё ниже опускаются цены. Всё больше появляется возможностей получения сочных цветов, простоты в управлении. Всё чаще … PIC32MZ – Core Timer (библиотека)Views: 545 Переработанные файлы от Microchip, библиотека для работы с Core Timer.
PIC32MZ – Core Timer (библиотека)Views: 545 Переработанные файлы от Microchip, библиотека для работы с Core Timer. Интерактивные LedViews: 457 Тема проекта продолжение следует…. Это может быть интересно
Интерактивные LedViews: 457 Тема проекта продолжение следует…. Это может быть интересно LCD драйвер – UC1601sViews: 1587 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG.
LCD драйвер – UC1601sViews: 1587 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG.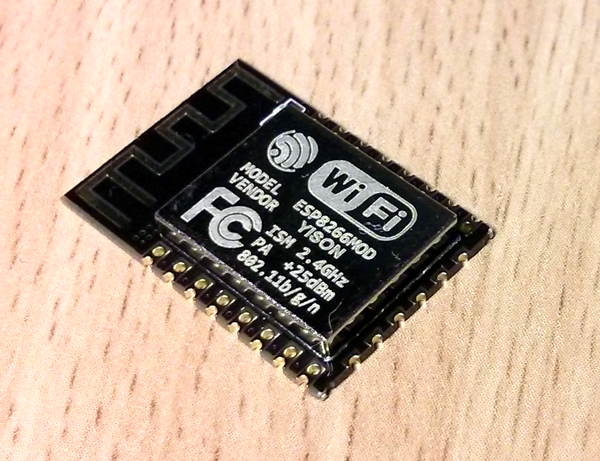 WiFi ESP8266 ESP-202 (ESP-12F)Views: 7677 Первое знакомство, сначала надо его купить… http://voron.ua/catalog/024404 Схема для подключения и тестирования По схеме ставим две кнопки, сброс и кнопку BT2, для перевода в режим обновления прошивки. Если надо сделать …
WiFi ESP8266 ESP-202 (ESP-12F)Views: 7677 Первое знакомство, сначала надо его купить… http://voron.ua/catalog/024404 Схема для подключения и тестирования По схеме ставим две кнопки, сброс и кнопку BT2, для перевода в режим обновления прошивки. Если надо сделать …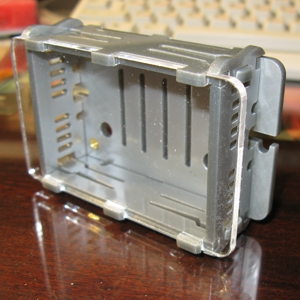 Акриловый корпус для платы ch-4000Views: 655 Плата ch-4000 подходит для монтажа в корпуса на дин рейку, но для домашней автоматики необходимо что-то другое, поэтому был разработан корпус из акрила который позволит создавать настольные и настенные устройства. Корпус …
Акриловый корпус для платы ch-4000Views: 655 Плата ch-4000 подходит для монтажа в корпуса на дин рейку, но для домашней автоматики необходимо что-то другое, поэтому был разработан корпус из акрила который позволит создавать настольные и настенные устройства. Корпус …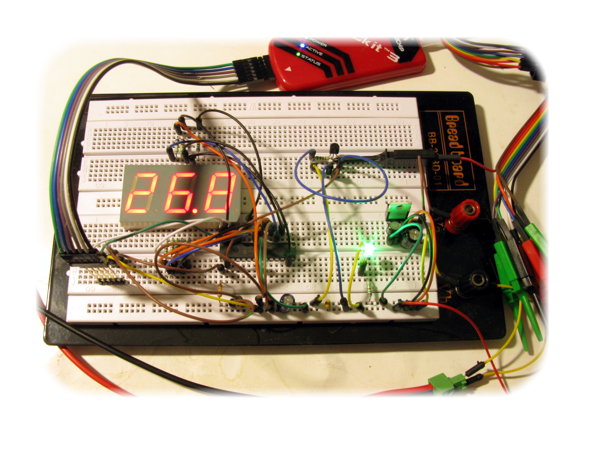 Индикатор температурыViews: 2663 Проект для начинающих, на демо плате BB-2T3D-01. Простой индикатор температуры. Проект никак не задумывался, просто на витрину магазин Ворон нужна была демонстрационная модель на макетной плате, чего нибудь работающего. Остановились на индикаторе …
Индикатор температурыViews: 2663 Проект для начинающих, на демо плате BB-2T3D-01. Простой индикатор температуры. Проект никак не задумывался, просто на витрину магазин Ворон нужна была демонстрационная модель на макетной плате, чего нибудь работающего. Остановились на индикаторе … Гаджеты для домашней автоматики – Датчик приближенияViews: 1968 Управление светодиодным освещением – Датчик приближения. Данный гаджет предназначен для управления внутренним освещением мебели. Датчик позволяет определить закрытие или открытие дверцы или ящика и при этом включать или …
Гаджеты для домашней автоматики – Датчик приближенияViews: 1968 Управление светодиодным освещением – Датчик приближения. Данный гаджет предназначен для управления внутренним освещением мебели. Датчик позволяет определить закрытие или открытие дверцы или ящика и при этом включать или … Проект с использованием MCC часть 11Views: 850 Можно несколько облагородить программу вынести наши процедуры обработки нажатия кнопок в отдельные функции. Но вы должны понимать, что это хоть и не значительно, но будет тормозить общую скорость …
Проект с использованием MCC часть 11Views: 850 Можно несколько облагородить программу вынести наши процедуры обработки нажатия кнопок в отдельные функции. Но вы должны понимать, что это хоть и не значительно, но будет тормозить общую скорость …