Views: 1120
Во многих системах управления, для формирования управляющих сигналов требуется модуль ШИМ, он позволяет не только формировать импульсы заданной длительности, но и с применением обычного RC фильтра строить простые ЦАП.
MCC -позволяет быстро и легко настроить модули OC в PIC24 для работы с ШИМ.
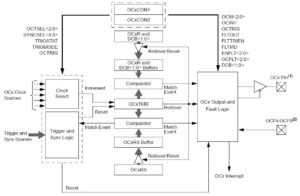
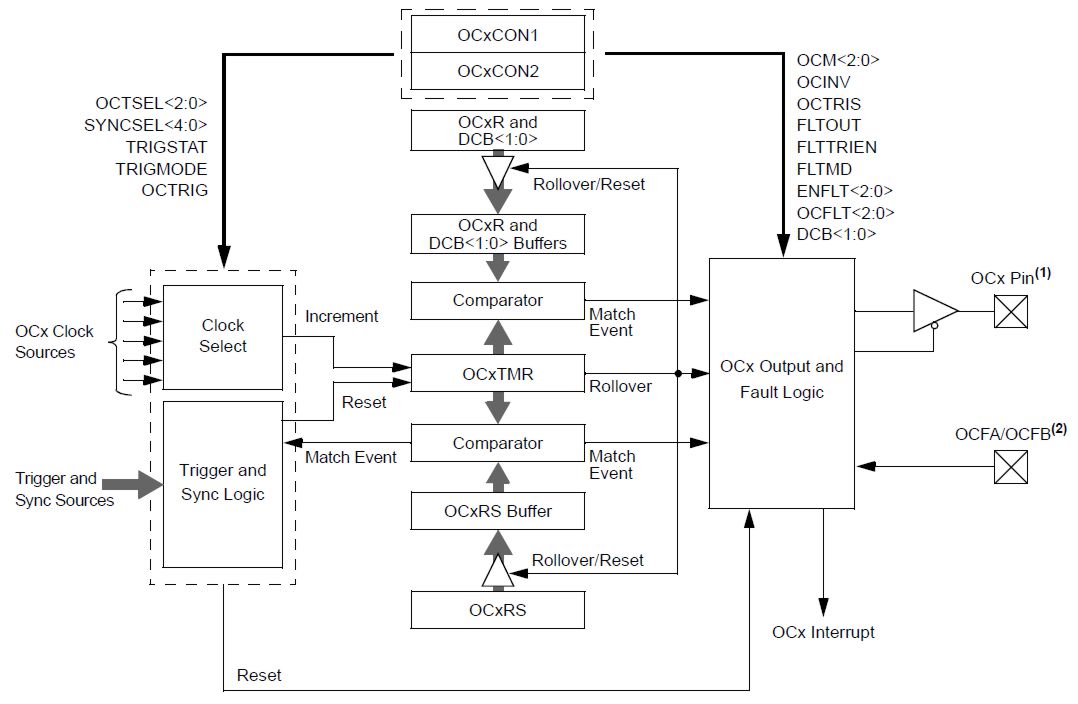
Структурная схема модуля в режиме ШИМ:
Процедура настройки модуля для работы в режиме ШИМ выглядит так:
1. Настройте выход модуля OCx на нужный порт.
2. Вычислите требуемые рабочие циклы период или частоту ШИМ.
3. Установить начальное значение длительности.
4. Настроить параметр источника синхронизации.
5. Включите прерывание, я если требуется, для модулей сравнения таймера и вывода. Для использования PWM Fault необходимо использовать прерывание на выходе.
6. Выберите желаемый режим PWM в битах OCM <2: 0> (OCxCON1 <2: 0>).
7. Соответствующие входы Fault могут быть активированы с использованием битов ENFLT <2: 0>, как описано в OCxCON1.
8. Если в качестве источника тактового сигнала выбран таймер, настройте период работы таймера.
Примечание более подробно читайте в описании.
В MCC начинаем с добавления модуля в проект
Откроем закладку менеджер выводов Pin Manager: Grid View. В этом окне настроим выход модуля на необходимый для нас вывод порта. В моем варианте это порт RB9/
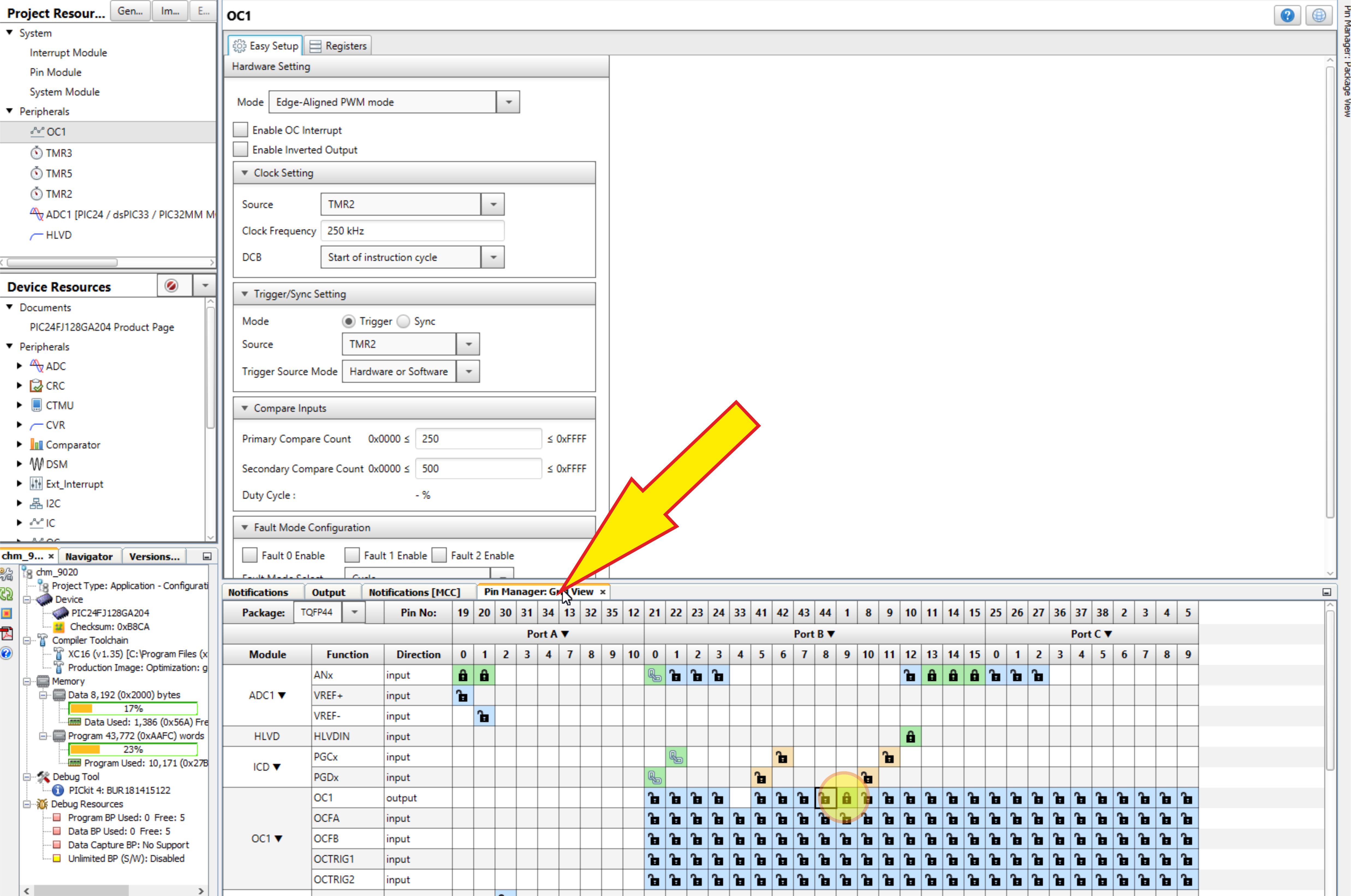
В окне Ресурсы проекта Project Resources выберем Pin Module и убедимся в настройке порта
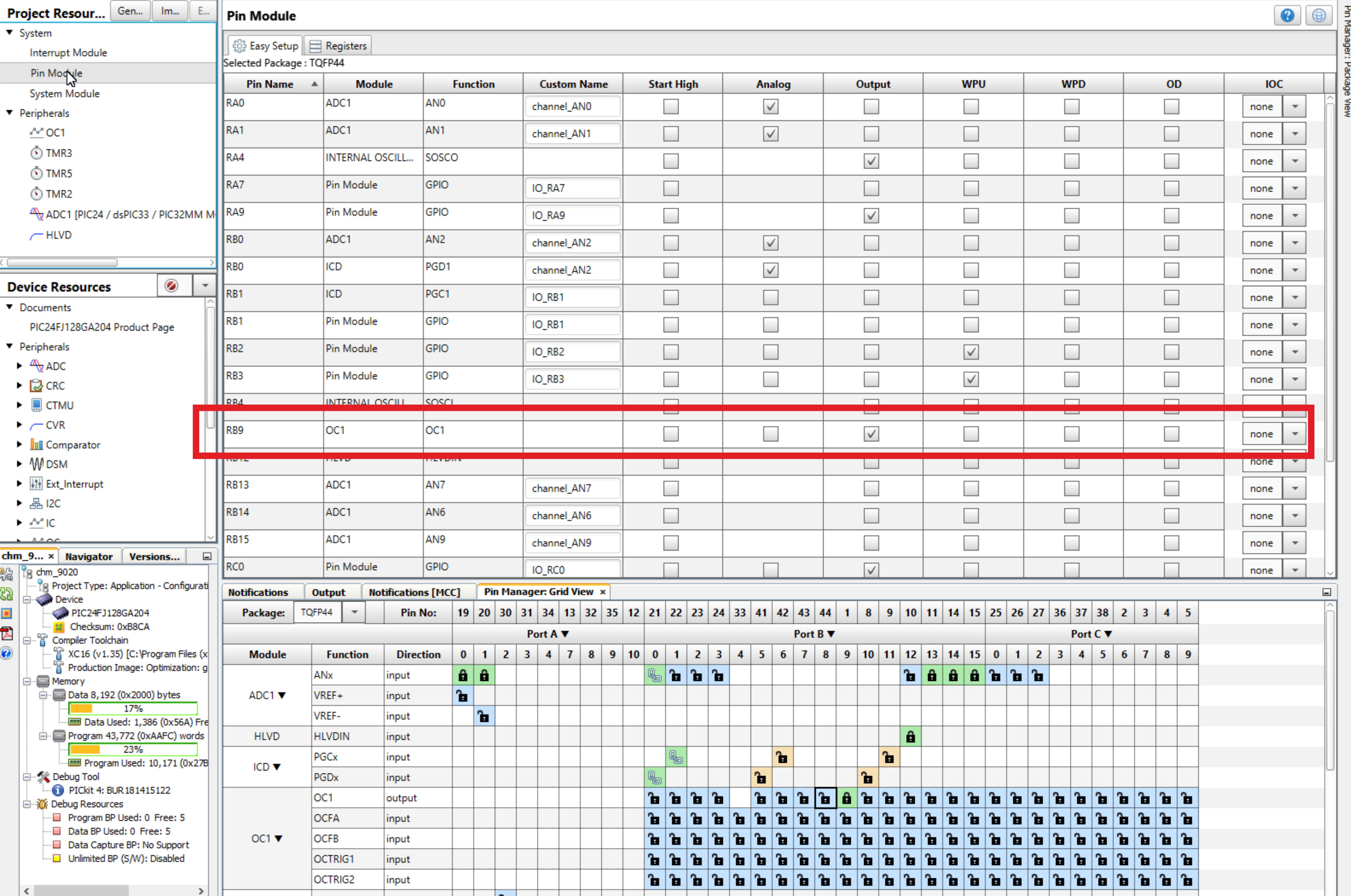
Выберем наш модуль (кликаем по надписи)

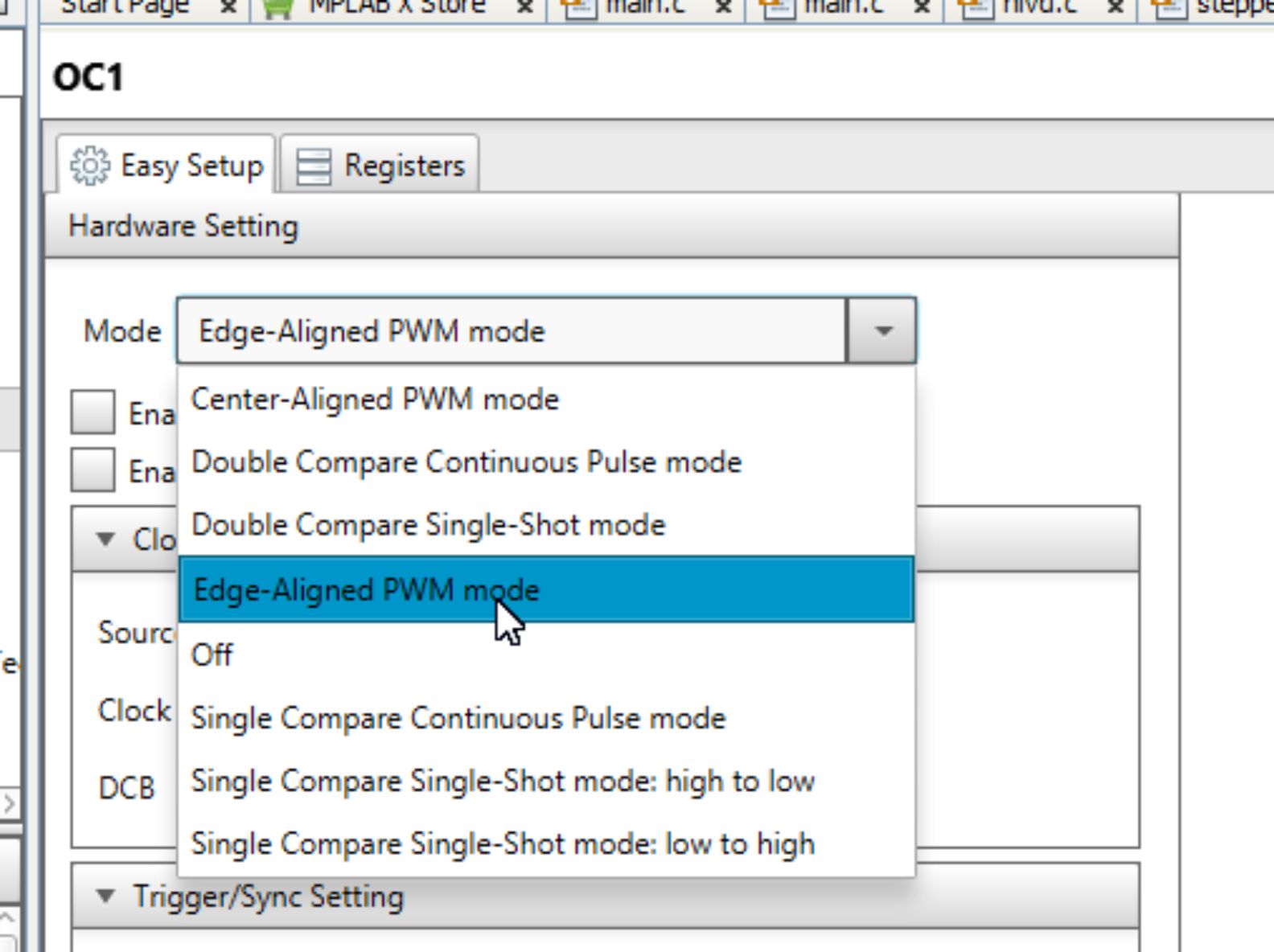
Перейдем к настройке модуля.
Выберем режим ШИМ.
Необходимо выбрать источник тактовых импульсов для модуля, тут большой выбор опишем пару вариантов. Выберем FOSC/2 это тактирование от тактового генератора.
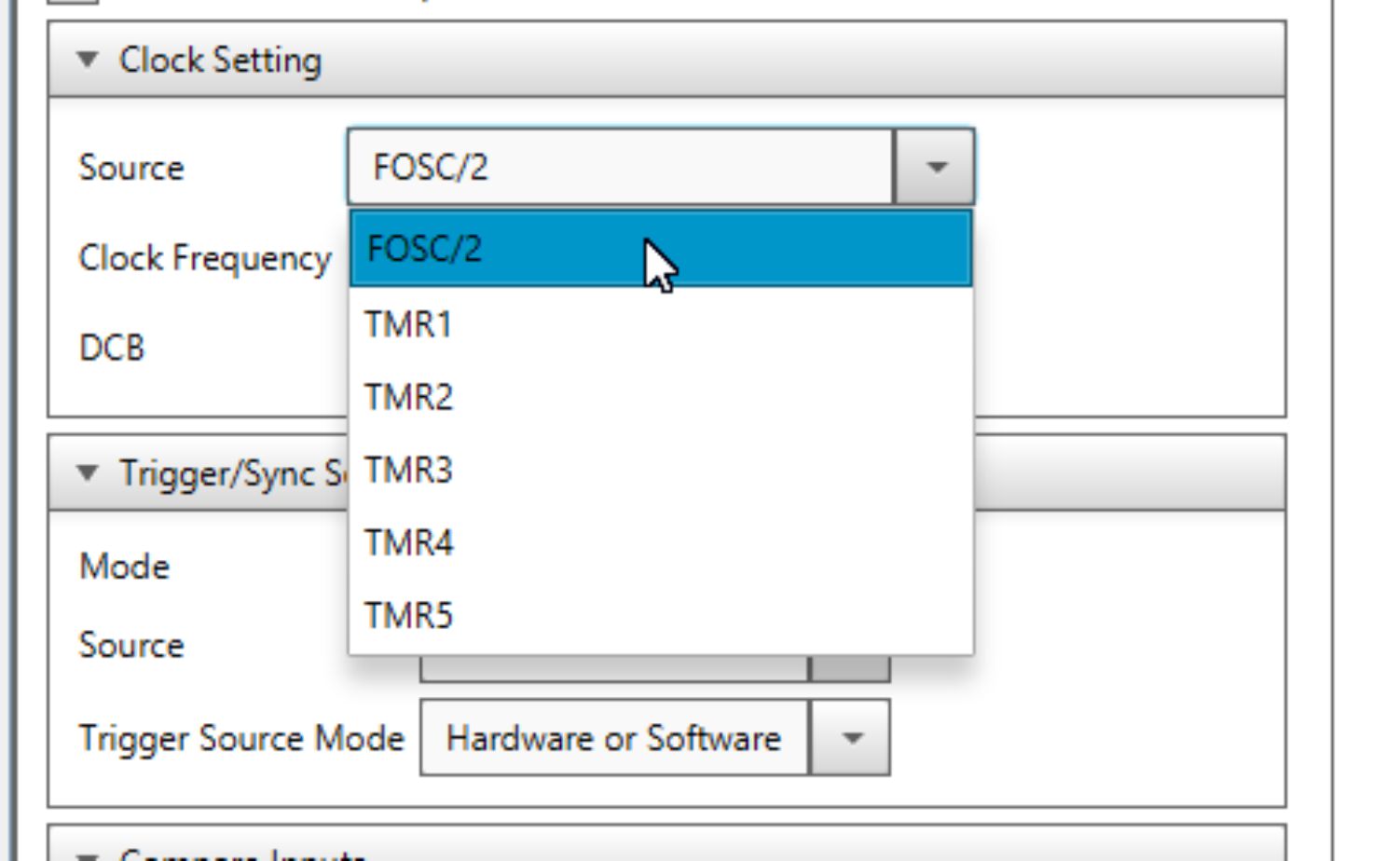
Если у нас тактовая 32 МГц, то на вход модуля будут поступать 16 МГц.
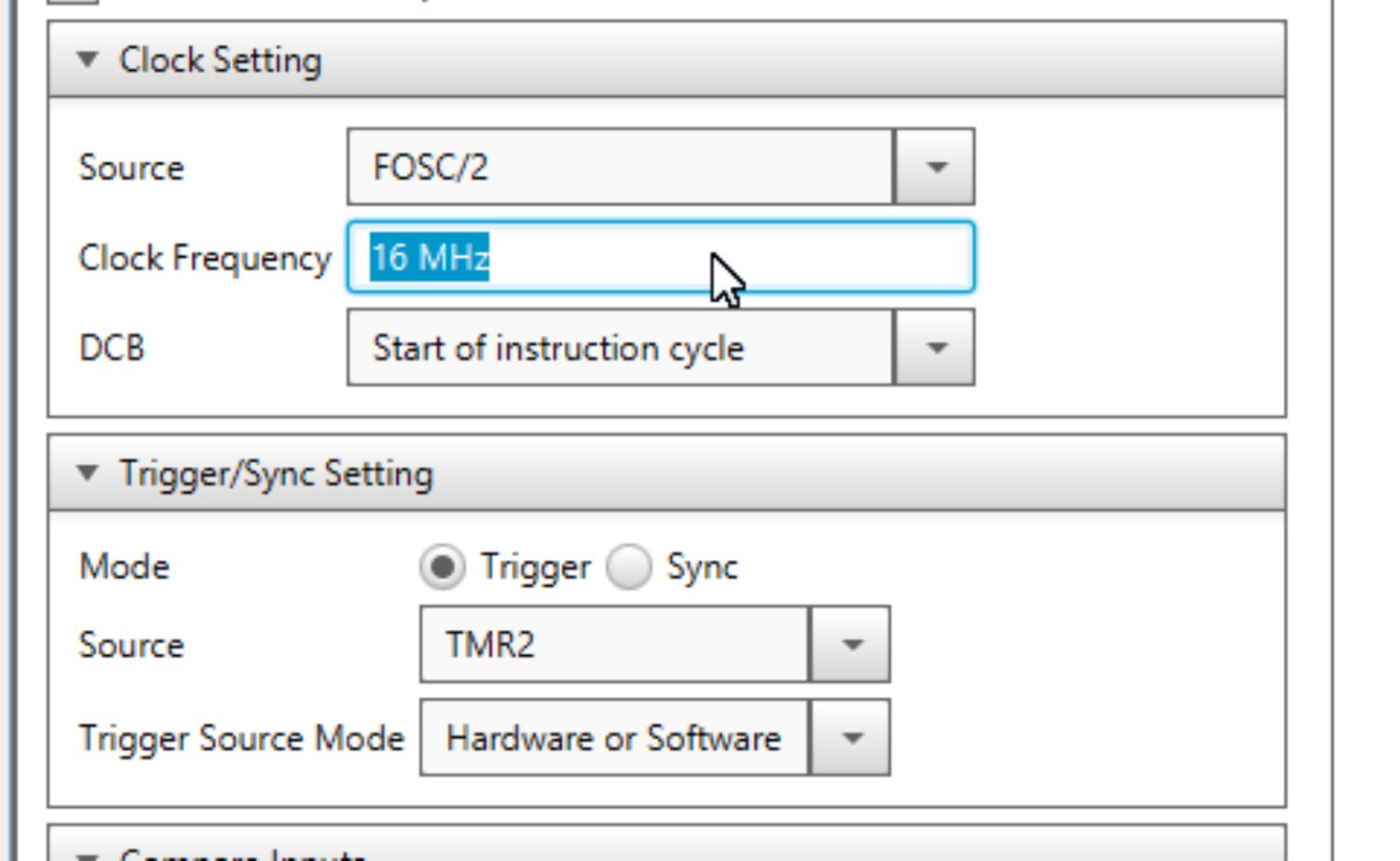
Параметр DCB оставим в варианте Start of instruction cycle.
Далее идут два важных параметра, это как будут запускаться работа ШИМ или как она будут синхронизироваться, а также параметр с какой выходной частотой будет работать ШИМ и его начальное значение.
Для начала зададим рабочую частоту (длительность) и начальное значение ШИМ. Это необходимо сделать в этом окне
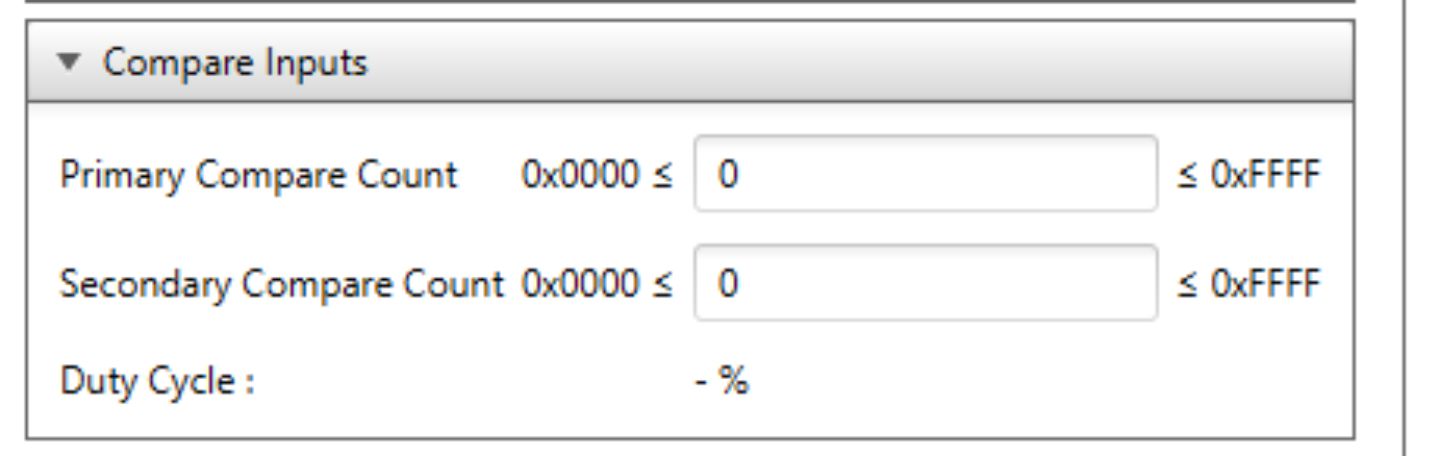
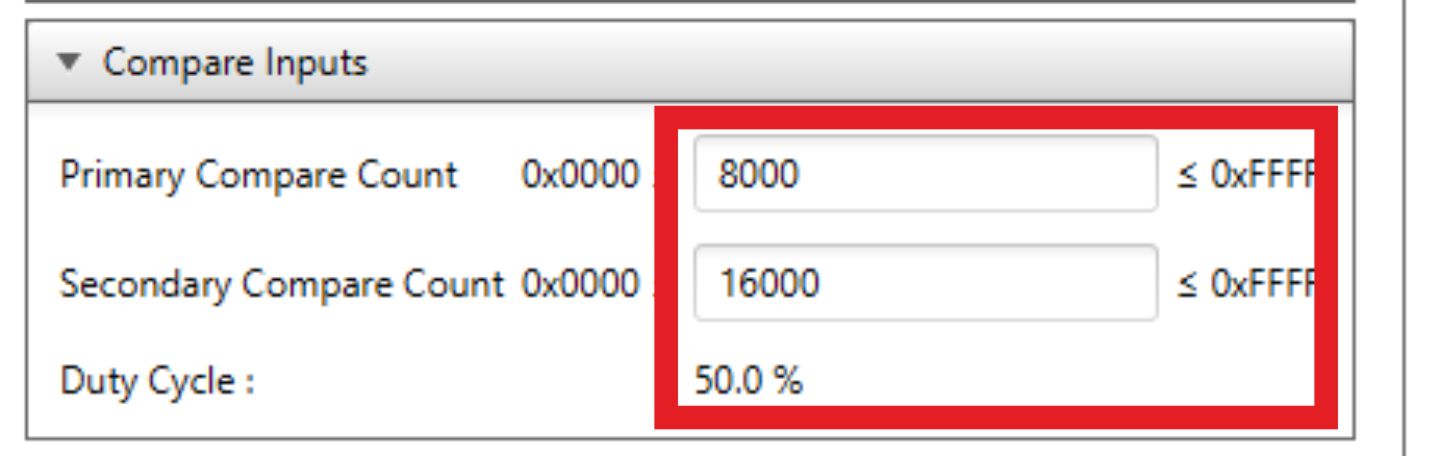
Параметр Secondary Compare Count задает рабочую частоту или период ШИМ. У нас тактовая 16 МГц например нам необходимо частота ШИМ 1000 Гц.
16 000 000 / 1000 = 16000
Промеряем 16000 < 0xFFFF (65535 это максимальное значение которое может иметь этот параметр) да меньше, значит, такая частота ШИМ возможна при такой тактовой частоте! Ok – подходит! Далее, чтобы получить например меандр, сделаем длительность импульса ШИМ 50%, это значит нашу
16000/2 = 8000
Заполним поля.
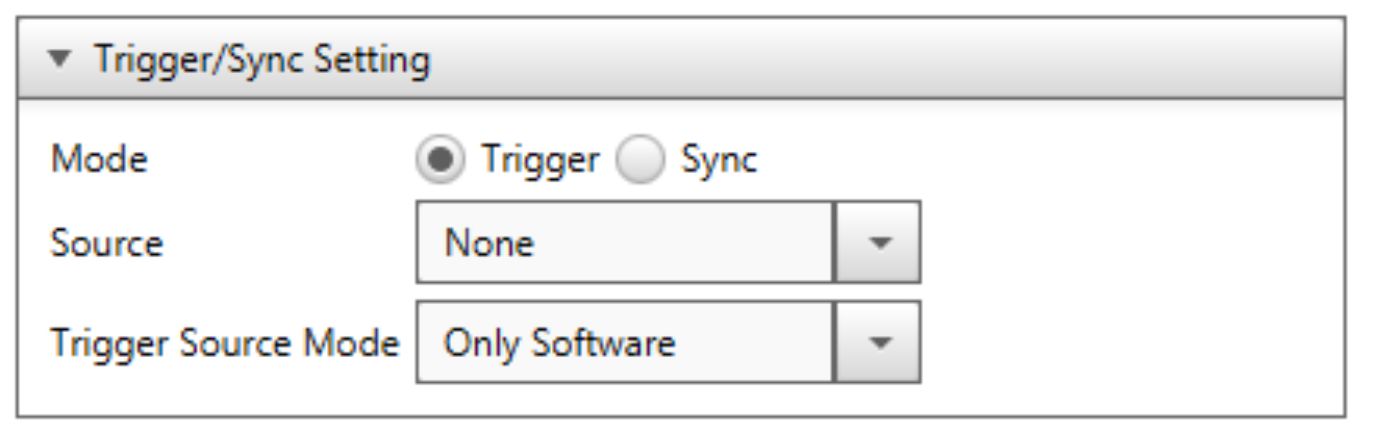
Далее настроим панель синхронизации
Выполним генерацию MCC? чтобы он переписал наши файлы и загрузим прошивку по микроконтроллер, проверим что реально получили в железе:
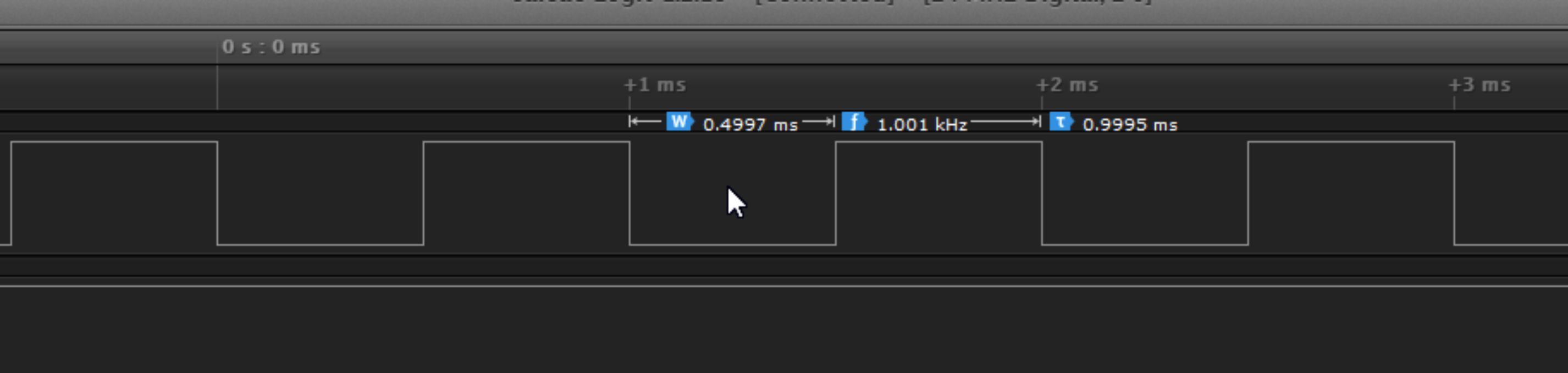
на выходе наша заданная 1 кГц, длительность положительного и отрицательного периода одинакова мы имеем меандр!!!
Еще один вариант настройки ШИМ, можно в качестве тактовых импульсивный выбрать таймер. Например, ТМR2. В этом варианте необходимо будет настроить и сам таймер, например, у меня об имеет период работы 250 кГц.

Для установки параметров, например, 2 кГц частота шим и начальный период 30% рассчитаем значения для регистров OC1R (длительность импульса) и OC1RS (период – частота ШИМ).
250 000 / 2000 = 125 (OC1RS )
125 * 0,3 =37,5 (OC1R = 38)
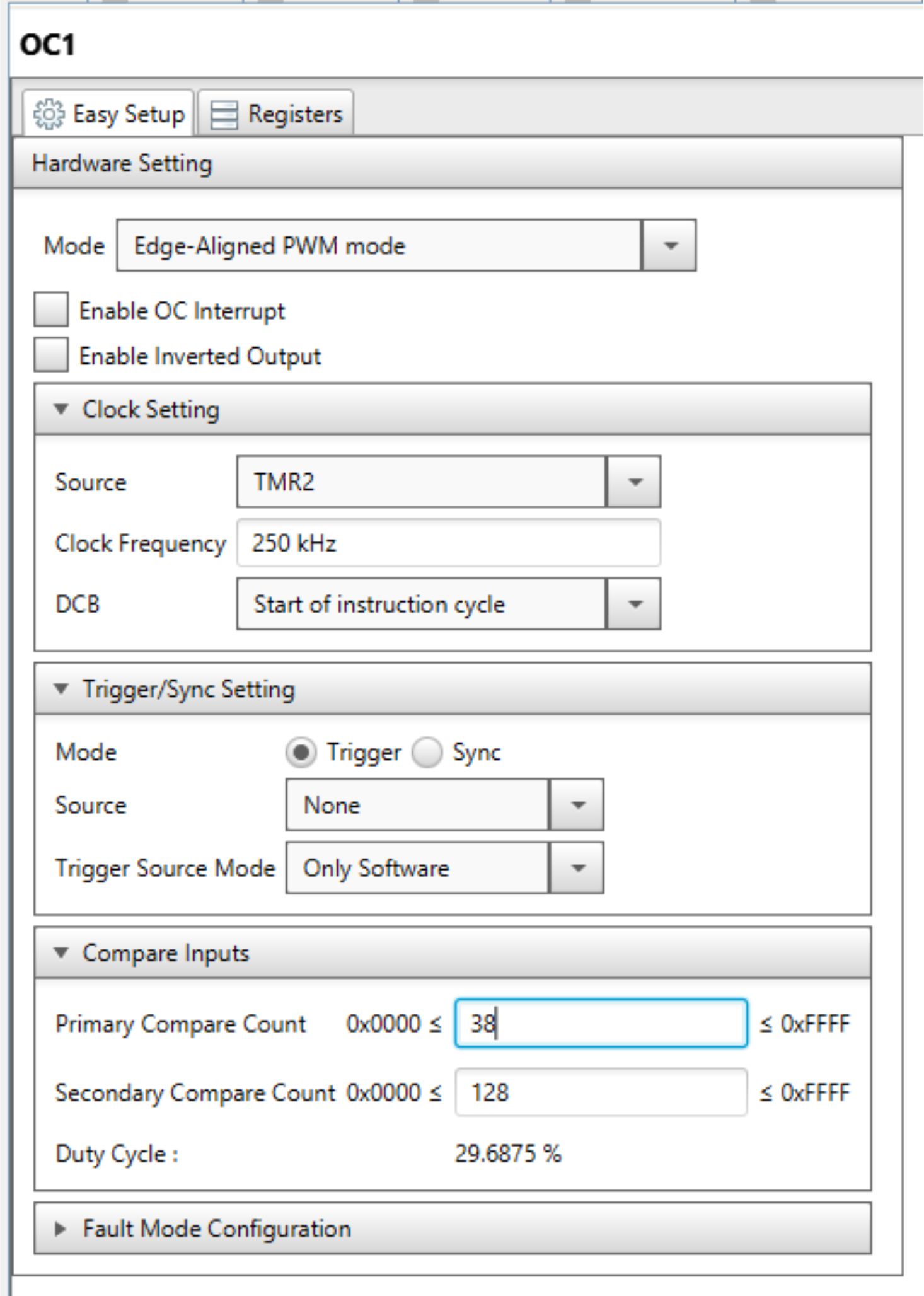
Выполним генерацию, загрузим прошивку в МК и проверим состояние ШИМ
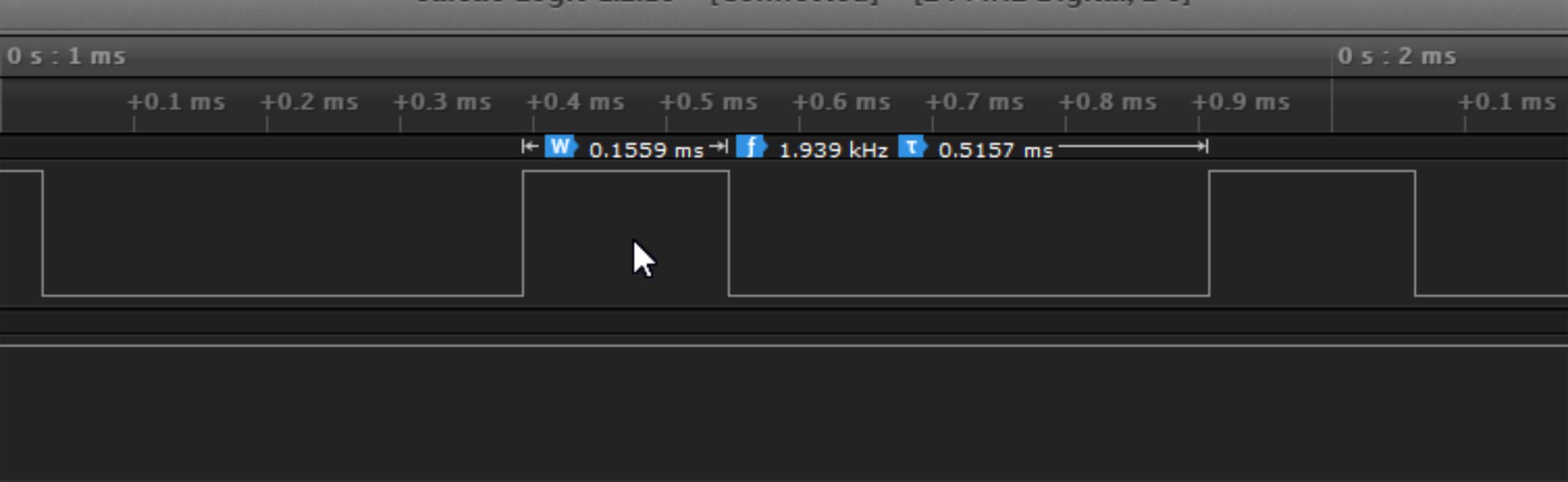

Частота 2 кГц, длительность импульса 30% все ок!
Осталось теперь понять как управлять в программе шириной импульса, Для этого нам MCC в файлах библиотеки oc1 функцию OC1_PrimaryValueSet:
void OC1_PrimaryValueSet( uint16_t priVal )
{
OC1R = priVal;
}
Которая позволяет записывать регистр OC1R или можно непосредственно выполнять запись в этот регистр.
Но это несколько не удобный метод, частенько проще формировать запись в ШИМ значения в процентах, например нам надо 50 процентов, просто пишем, 50 или надо 20% пишем 20, как это сделать? Я предлагаю использовать такой метод:
void PWM1 (uint8_t percent) //
{
uint32_t pwmu = percent;
pwmu = (pwmu*OC1RS)/100;
OC1R = (uint16_t)pwmu;
}
думаю, что выполняет функция достаточно просто, мы на основе значения в регистре периода вычисляем значение которое надо записать в регистр импульса, на основании аргумента в процентах (учтите, что значения процентов не должно превышать число 100!)
Вот так просто настроить OCх модуль в режиме ШИМ и управлять им!
Это может быть интересно
 Дисплей KD035C-3A подключение и управлениеViews: 698 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение …
Дисплей KD035C-3A подключение и управлениеViews: 698 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение … Стробоскоп для автомобиляViews: 2166 Одним из популярных решений светового тюнинга автомобиля, мотоцикла или скутера стал эффект – “полицейский стробоскоп“. На база платы ch-c0050 реализовано несколько проектов. В этой статье приводятся две версии …
Стробоскоп для автомобиляViews: 2166 Одним из популярных решений светового тюнинга автомобиля, мотоцикла или скутера стал эффект – “полицейский стробоскоп“. На база платы ch-c0050 реализовано несколько проектов. В этой статье приводятся две версии … MPLAB® Code Configurator and EncoderViews: 1417 Еще раз про энкодер… Для некоторых приложений очень удобно и экономически выгодно, для настройки и управления использовать энкодер. Такие энкодеры имеют строенную тактовую кнопку которую можно применить для выбора …
MPLAB® Code Configurator and EncoderViews: 1417 Еще раз про энкодер… Для некоторых приложений очень удобно и экономически выгодно, для настройки и управления использовать энкодер. Такие энкодеры имеют строенную тактовую кнопку которую можно применить для выбора … CLUBBEST – reasoning on the visualization of music.Views: 124 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для …
CLUBBEST – reasoning on the visualization of music.Views: 124 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для … NeoPixel LED и PIC18Views: 1668 Еще раз об управлении светодиодами на драйвере WS2812 и ему подобных. Как известно эти светики управляются по однопроводной шине. Основная особенность, что программно можно описать передачу данных, …
NeoPixel LED и PIC18Views: 1668 Еще раз об управлении светодиодами на драйвере WS2812 и ему подобных. Как известно эти светики управляются по однопроводной шине. Основная особенность, что программно можно описать передачу данных, … ch-светомузыка и AK4113Views: 1280 Пришло время вернуться к светомузыке. На сегодня использование аналогового входа стало непрактичным, на сегодня необходимо использовать S/PDIF и Toslink. С этим надо было как то разобрать, что это …
ch-светомузыка и AK4113Views: 1280 Пришло время вернуться к светомузыке. На сегодня использование аналогового входа стало непрактичным, на сегодня необходимо использовать S/PDIF и Toslink. С этим надо было как то разобрать, что это … ch-светомузыка от теории до реализацииViews: 689 Сразу оговоримся технология или теория ch-светомузыки, это постоянно развивающийся процесс и то что будет сказано сегодня завтра может быть опровергнуто и считаться ошибочным. Назовем само решение проблемы автоматического …
ch-светомузыка от теории до реализацииViews: 689 Сразу оговоримся технология или теория ch-светомузыки, это постоянно развивающийся процесс и то что будет сказано сегодня завтра может быть опровергнуто и считаться ошибочным. Назовем само решение проблемы автоматического … Acquaintance with audio-bluetooth modules F-6888 (BK3254).Views: 2156 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, …
Acquaintance with audio-bluetooth modules F-6888 (BK3254).Views: 2156 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, … MAX7219/21 и 8х8 LED дисплеиViews: 922 MAX7219, MAX7221 предназначены для вывода информации на 8 разрядов семисегментного индикатора, но на нем легко организовать вывод на светодиодные индикаторы 8х8. продолжение следует…. Это может быть интересно
MAX7219/21 и 8х8 LED дисплеиViews: 922 MAX7219, MAX7221 предназначены для вывода информации на 8 разрядов семисегментного индикатора, но на нем легко организовать вывод на светодиодные индикаторы 8х8. продолжение следует…. Это может быть интересно VU Meter Tower ARTViews: 1603 Стерео индикатор уровня аудио сигнала. Компактность и удобство проектирования устройств на светодиодах WS2812B, а также легкость реализации алгоритма родило идею созданию своей конструкции. В этом проекте я предоставлю …
VU Meter Tower ARTViews: 1603 Стерео индикатор уровня аудио сигнала. Компактность и удобство проектирования устройств на светодиодах WS2812B, а также легкость реализации алгоритма родило идею созданию своей конструкции. В этом проекте я предоставлю …