
Views: 3084
CCP – модуль можно использовать в трех режимах:
Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями.
Compare – позволяет формировать импульсы любой полярности, формирование частоты. Так же управлять внутреними модулями.
PWM – формирование сигналом ШИМ.
В режимах Compare и PWM модуль работает совместно со встроенными таймерами.
Тут речь пойдет о использовании CCP модуля в режиме Compare для формировании частоты.
Как выполнить настройку модуля в этом режиме.
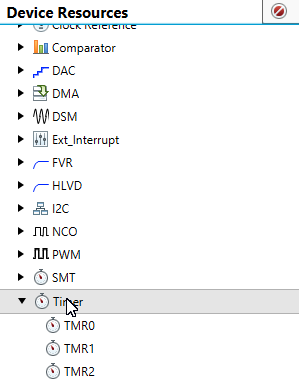
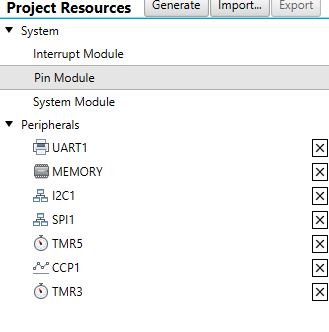
В проекте запускаем MCC, в окне Ресурсы устройства

Выбираем в разделе CCP любой модуль (CCP1….CPPn) и делаем двойной клик. MCC добавит модуль в раздел Ресурсы проекта.
 Сделаем клик для окна открытия быстрой настройки модуля, в нем укажем с каким таймером ему предстоит работать
Сделаем клик для окна открытия быстрой настройки модуля, в нем укажем с каким таймером ему предстоит работать
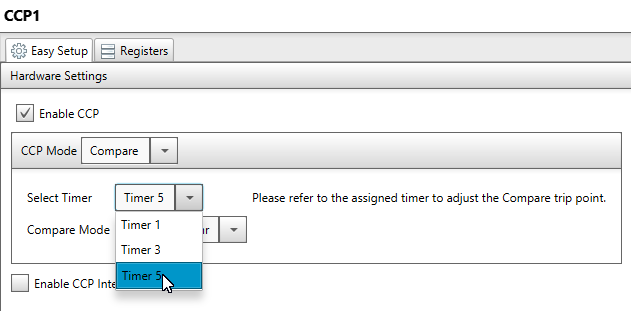
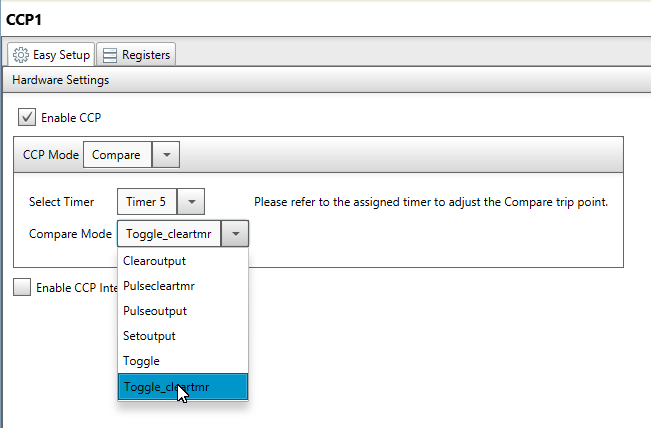
Я выбрал из доступных вариантов таймер 5. Далее необходимо выбрать режим Pulse output, clear TMRx этот режим позволяет формировать на выходе модуля непрерывный поток заданной частоты.
После этого добавим выбранный таймер 5. Перейдем в окно Ресурсы устройства и откроем раздел таймеры и сделаем двойной клик на нашем таймере, он исчезнет в разделе Ресурсы устройства
и появиться в разделе Ресурсы проекта. Вызовем свойства таймера и выполним его настройку, в принципе то, навастривать нечего. Главное, что бы тактовая была настроена FOSC/4, хотя можно выбрать и любое другой источник. Настройку предделителя можно оставить 1:1, от него будет зависеть шаг генерируемой частоты при изменении настроек регистра CCPR.
Как это работает:
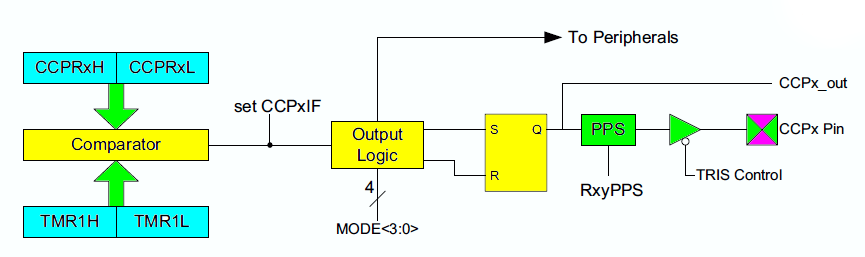 Таймер тактируется от тактовой частоты в нашем случает от FOSC/4, при совпадении значения записного в регистр CCPR со значением в таймере TMR будет формироваться импульс для выходной логики модуля который управляет RS-триггером. После это выполняется сброс таймера и его отсчет будет начат заново. По достижении сравнения выходная логика переключит триггер в противоположное состояние. Таким образом при задании значения в регистр CCPR мы формируем период который будет задавать выходную частоту на выходе модуля.
Таймер тактируется от тактовой частоты в нашем случает от FOSC/4, при совпадении значения записного в регистр CCPR со значением в таймере TMR будет формироваться импульс для выходной логики модуля который управляет RS-триггером. После это выполняется сброс таймера и его отсчет будет начат заново. По достижении сравнения выходная логика переключит триггер в противоположное состояние. Таким образом при задании значения в регистр CCPR мы формируем период который будет задавать выходную частоту на выходе модуля.
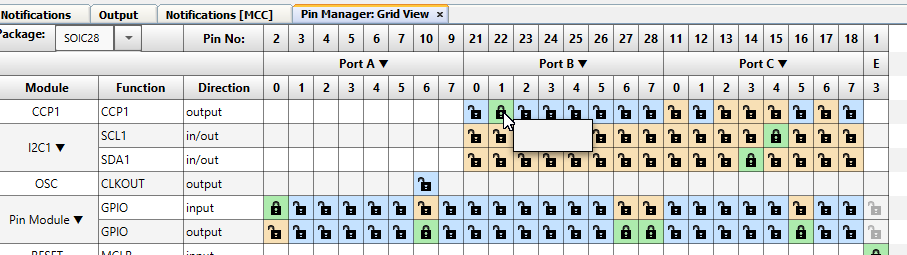
Подключит выход модуля к заданному нами порту микроконтроллера, например, мы его желаем подключить RB2, откроем окно Менеджера вводов и зададим подключение модуля к порту RB2.
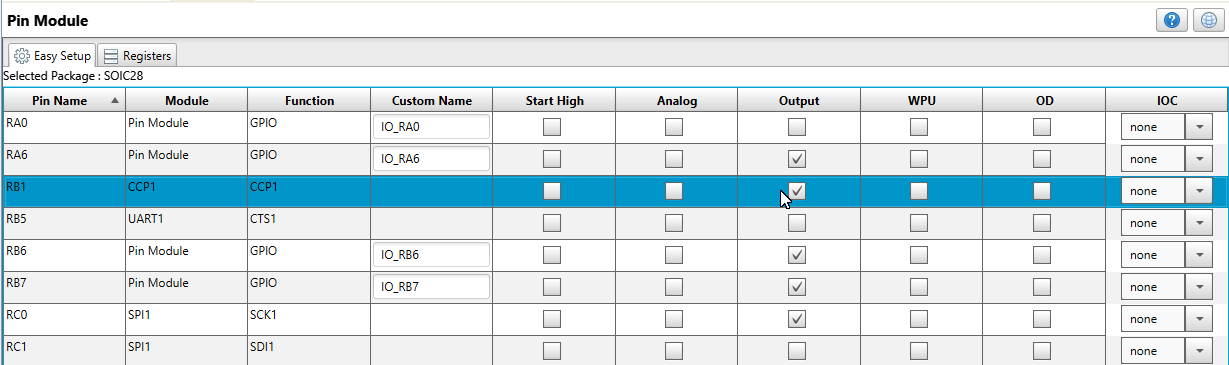
Дополнительно в разделе Ресурсы проекта выберем ресурс Модуль выводов
и проверим конфигурацию нашего вывода, он должен быть настроен на выход и все остальные опции должны быть отключены
 Теперь самое главное как рассчитать частоту которую мы можем получить на выход нашего модуля.
Теперь самое главное как рассчитать частоту которую мы можем получить на выход нашего модуля.
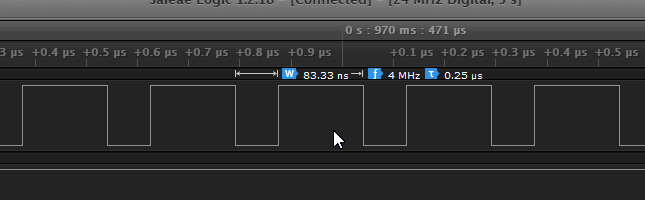
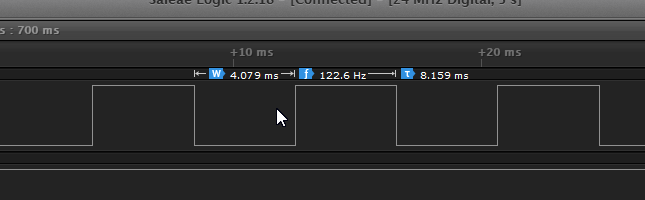
Наша тактовая частота FOSC = 64 000 000 Гц (в моем случае), сразу делиться на 4 (так выбрано в конфигуратора), т.е на входе таймера мы имеем 8 000 000 Гц. Далее идет предделитель у меня настроен на 1 , т.е после него все те же 8 МГц, таймер с связке с модулем может иметь период от 1 до 65536. Т.е. если период 1, то на выходе формируются управляющие импульсы для выходной логики с частотой 8Мгц, после каждого импульса состояние RS-триггера меняется на противоположное, это еще деление на 2 и мы будем иметь выходную частоту 4 Мгц.
Расчет выходной частоты для нашей настройки буде иметь вид
Foun = ((((FOSC/4) /Prescaler)/CCPR)/2);
Минимальная частота будет составлять если CCPR = 0xFFFF ~ 122 Гц.
 Отсюда модно получить значение которое Нам необходимо записать в модуль CCPR для получения заданной частоты.
Отсюда модно получить значение которое Нам необходимо записать в модуль CCPR для получения заданной частоты.
CCPR = ((((FOSC/4 )/Prescaler)/Foun)/2);
Если значение CCPR установлено в 0 на выходе будет постоянно высокий уровень!
Это может быть интересно
 CAN – Controller Area NetworkViews: 1071 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, …
CAN – Controller Area NetworkViews: 1071 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, … CCP – модуль в режиме Compare на примере PIC18Views: 3084 CCP – модуль можно использовать в трех режимах: Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями. Compare – позволяет …
CCP – модуль в режиме Compare на примере PIC18Views: 3084 CCP – модуль можно использовать в трех режимах: Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями. Compare – позволяет … Мониторинг температурыViews: 1378 Настоящий проект создан как обучающий с применением библиотек ds18b20 и LCDHD44780 и компилятора Microchip MPLAB XC8 C Compiler V1.12. Если необходимо иметь информацию по состоянию температуры в помещении или в здании, с количеством до 6 точек (16), то …
Мониторинг температурыViews: 1378 Настоящий проект создан как обучающий с применением библиотек ds18b20 и LCDHD44780 и компилятора Microchip MPLAB XC8 C Compiler V1.12. Если необходимо иметь информацию по состоянию температуры в помещении или в здании, с количеством до 6 точек (16), то … Интерактивные LedViews: 457 Тема проекта продолжение следует…. Это может быть интересно
Интерактивные LedViews: 457 Тема проекта продолжение следует…. Это может быть интересно Модуль CAN в микроконтроллерах PIC18Views: 5720 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований …
Модуль CAN в микроконтроллерах PIC18Views: 5720 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований … Altium Designer my setup system and project structureViews: 682 Используйте только последнее обновление!!! Updates https://catcatcat.d-lan.dp.ua/altium-designer-my-libraries-project-templates-system-settings-by-catcatcat-v23-09/ Тут хочу поделиться как я настраиваю Altium Designer и как я использую файлы DXPPreferences.DXPPrf для быстрой конфигурации и получения …
Altium Designer my setup system and project structureViews: 682 Используйте только последнее обновление!!! Updates https://catcatcat.d-lan.dp.ua/altium-designer-my-libraries-project-templates-system-settings-by-catcatcat-v23-09/ Тут хочу поделиться как я настраиваю Altium Designer и как я использую файлы DXPPreferences.DXPPrf для быстрой конфигурации и получения … MCC PIC24 – модуль OUTPUT COMPARE – режиме ШИМViews: 1120 Во многих системах управления, для формирования управляющих сигналов требуется модуль ШИМ, он позволяет не только формировать импульсы заданной длительности, но и с применением обычного RC фильтра строить простые …
MCC PIC24 – модуль OUTPUT COMPARE – режиме ШИМViews: 1120 Во многих системах управления, для формирования управляющих сигналов требуется модуль ШИМ, он позволяет не только формировать импульсы заданной длительности, но и с применением обычного RC фильтра строить простые … Проект с использованием MCC часть 01Views: 2512 Для изучения MCC я выбрал простой контроллер PIC16F1509. Выбор его был обусловлен богатой новой периферией которую можно изучить. Для начала была собрана схема на макетной плате Внешний вид …
Проект с использованием MCC часть 01Views: 2512 Для изучения MCC я выбрал простой контроллер PIC16F1509. Выбор его был обусловлен богатой новой периферией которую можно изучить. Для начала была собрана схема на макетной плате Внешний вид … Регулятор влажности ch-3800Views: 1418 И еще один проект на плате ch-c3xxx – универсальный регулятор влажности ch-3800. Регулятор позволяет работать как в режиме индикатора влажности, так и в режиме регулятора. Рабочий диапазон …
Регулятор влажности ch-3800Views: 1418 И еще один проект на плате ch-c3xxx – универсальный регулятор влажности ch-3800. Регулятор позволяет работать как в режиме индикатора влажности, так и в режиме регулятора. Рабочий диапазон … Проект с использованием MCC часть 08Views: 1022 И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, …
Проект с использованием MCC часть 08Views: 1022 И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, …