
Views: 2842
Часть вторая – Первая программа на PIC32.
Музыкальная тема к статье, слушаем:
Для начала изучения PIC32 надо иметь или демоплату или самому её изготовить имея микроконтроллер. Начнем из трудоемкого варианта я имею микроконтроллер PIC32MZ1024ECG064 и теперь задача как его подключить и как его запрограммировать. Для программирования и имею PICkit4, который работает быстрее ICD3, поэтому на этапе невозможности приобрести ICD4 рекомендую его или в последнее время в ГАММЕ появился программатор MPLAB Snap по очень интересной цене.
 Схема для подключения нашего МК может быть выглядеть так:
Схема для подключения нашего МК может быть выглядеть так:
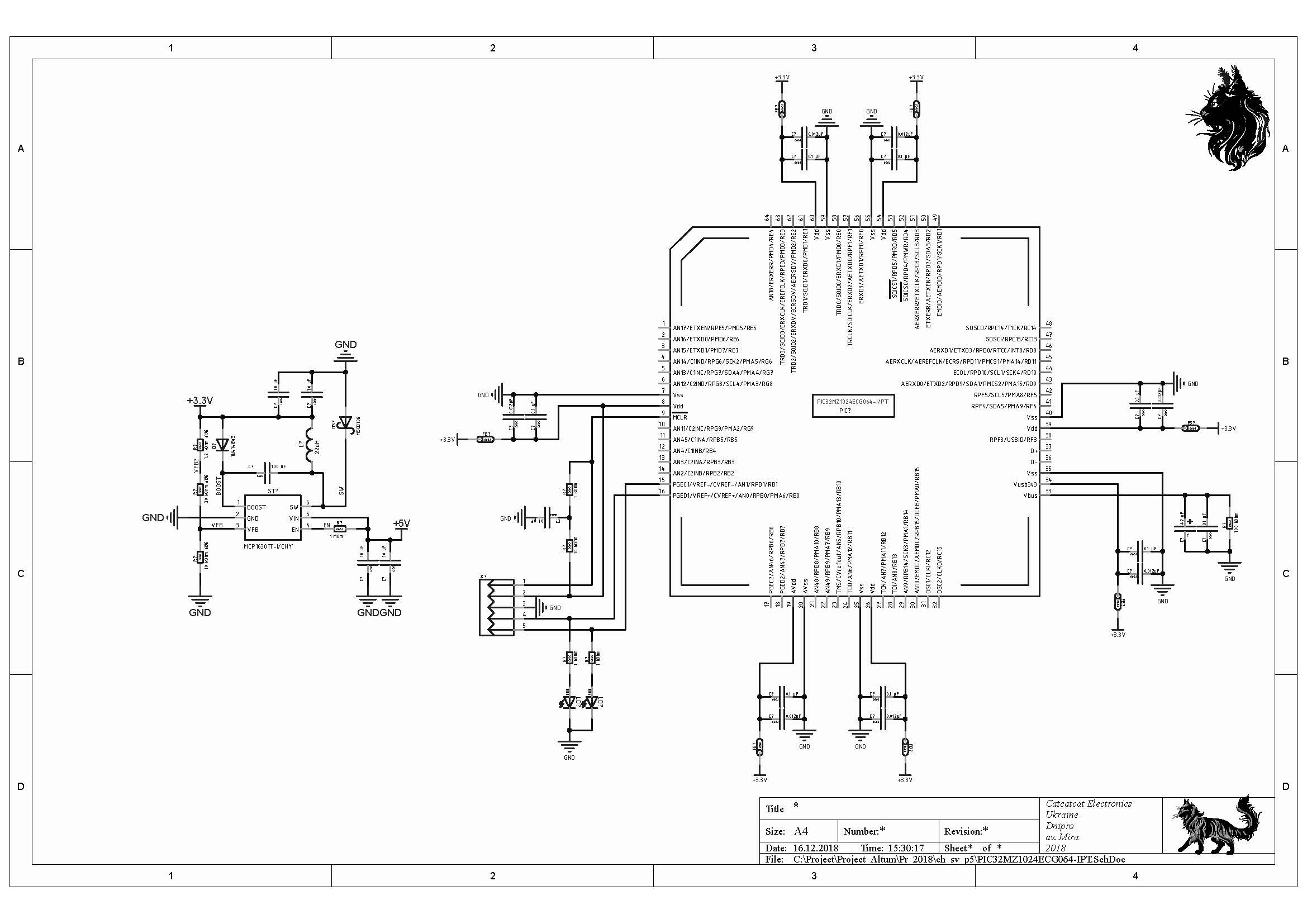
MPLAB® Harmony - или как это просто! Часть 2. Схема подключения 155.12 KB 498 downloads
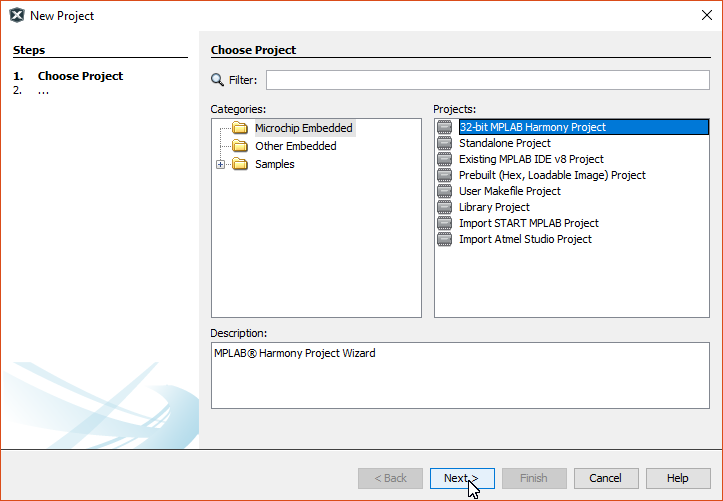
Схема подключения PIC32MZ1024ECG064. ...Загрузим MPLABX, создадим проект в формате гармони.

Выберем вариант создания проекта в формате Гармони, и жмем кнопку далее.
 В этом окне во первых в строке путь к гармони проверяем путь, он должен указывать на последнюю загруженную версию
В этом окне во первых в строке путь к гармони проверяем путь, он должен указывать на последнюю загруженную версию
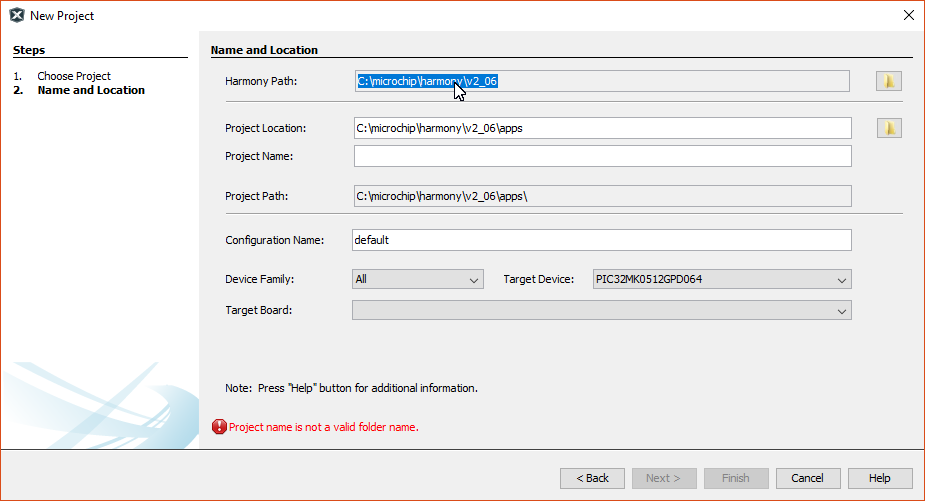
В строке расположение проекта надо будут указать где мы желаем хранить наш проект.

Для этого нажмем кнопку и выберите место хранения своего проекта.

В строке имя проекта введите имя, а отрывающемся списке целевое устройство выберите ваш микроконтроллер.

Если вы используете фирменную демоплату, вы можете указать это выбрав из списка доступных.

После нажатия кнопки Финиш будет создан проект с вашим именем. Автоматически будут загружен гармони-конфигуратор. Первое, что необходимо будут сделать, это изменить кодовую страницу тестовых файлов в которой будут создаваться ваш проект. Это необходимо для того, что бы создаваемые в вашем проеты символы иили символьные строки могли быть правильно закодированы.
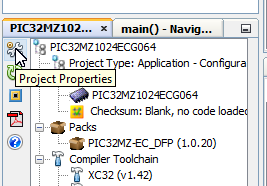
Нажмите символ настройки проекта.
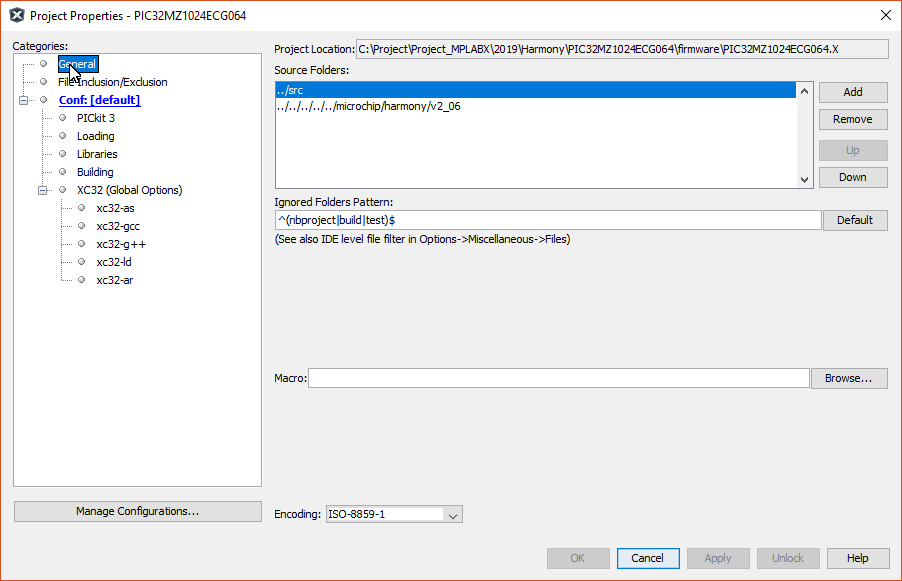
 Выберем общие параметры.
Выберем общие параметры.
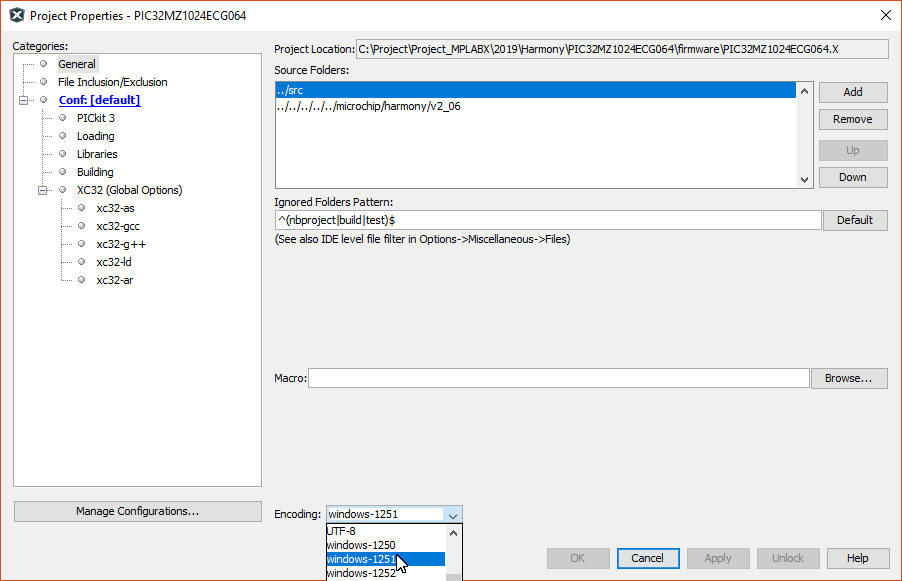
и в выпадающем списке выбреем кодировку Windows-1251 это будет корректно для кириллических шрифтов в Windows.
В параметре конфигурация, выберем версию языка программирования, и тип программатора.
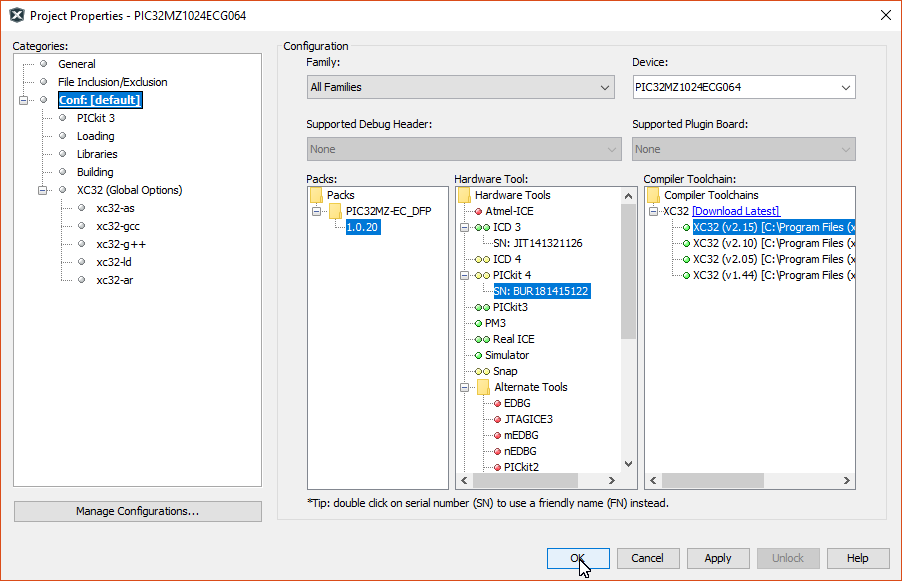
Нажимаем ок, на этом предварительная настройка окончена (процесс компиляции пока касаться не будем). Перейдем в настройки гармонии. Откроем закладку настройка тактового генератора. Тут для начала только посмотрим, периферия настроена на тактовую 100 МГц, процессор на 200 МГц. На практике контроллер можно разгонять до 250, но тут надо смотреть на возможности запуска умножителя, у меня были версии которые стабильно запускались на 220, 230 МГц.

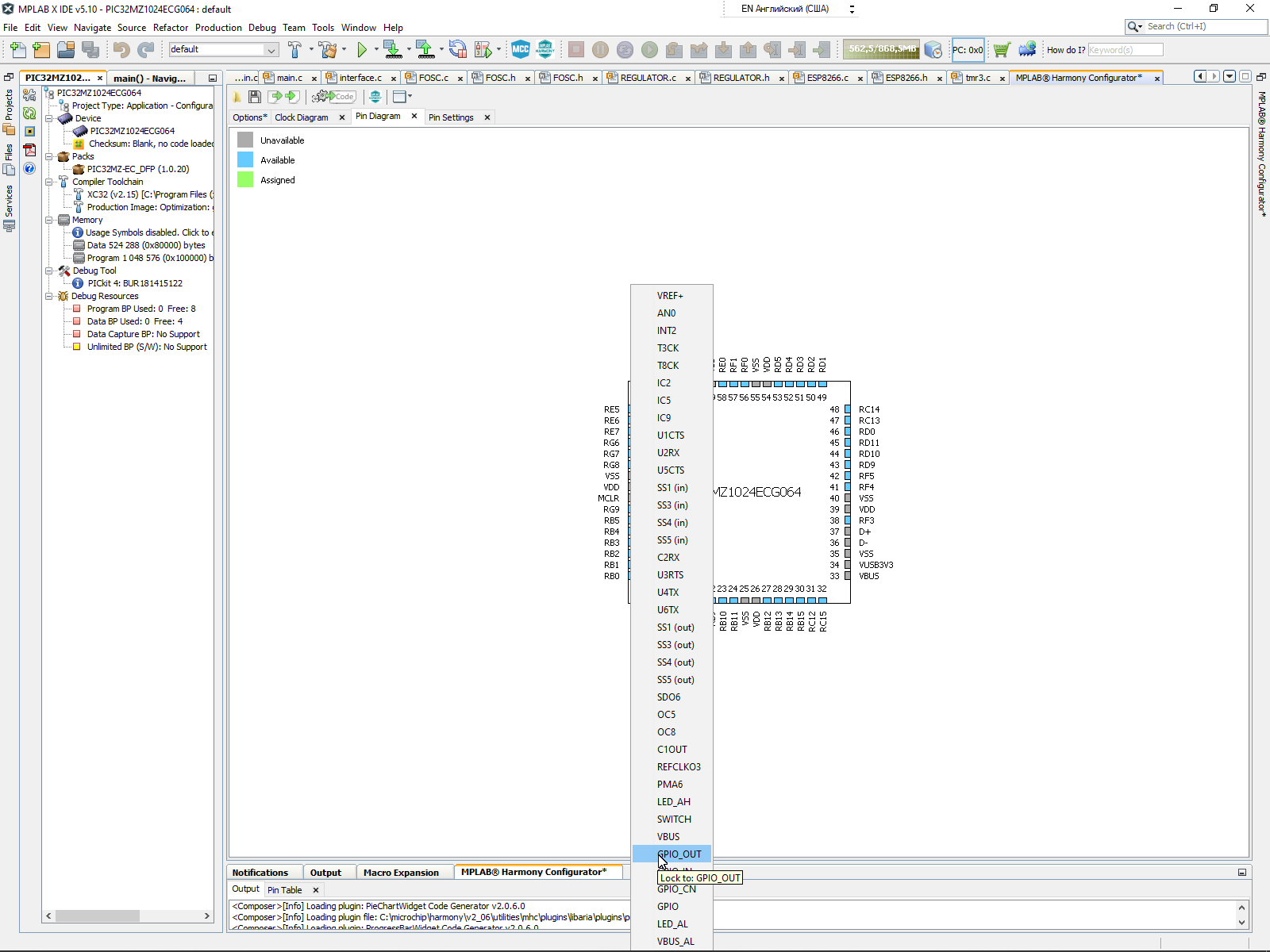
Переключимся на закладку диаграмма выводов. В этой закладке настроим наши выводы RB1 and RB0 на вывод. Клацаем на символе вывода откроется меню.
Выводы с измененными параметрами выделяются цветом и получают функциональное наименование.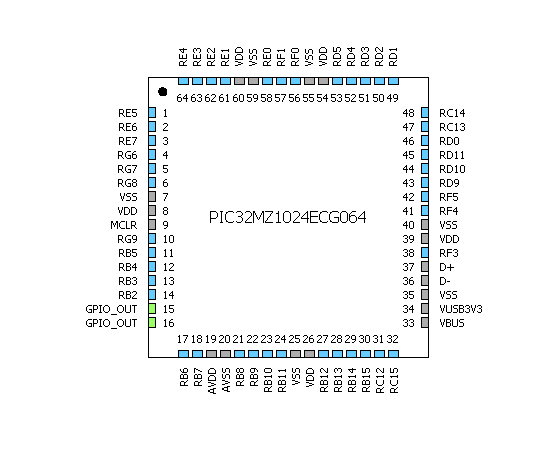 После этого откроем закладку настройка выводов и посмотрим как настроены наши выводы.
После этого откроем закладку настройка выводов и посмотрим как настроены наши выводы.
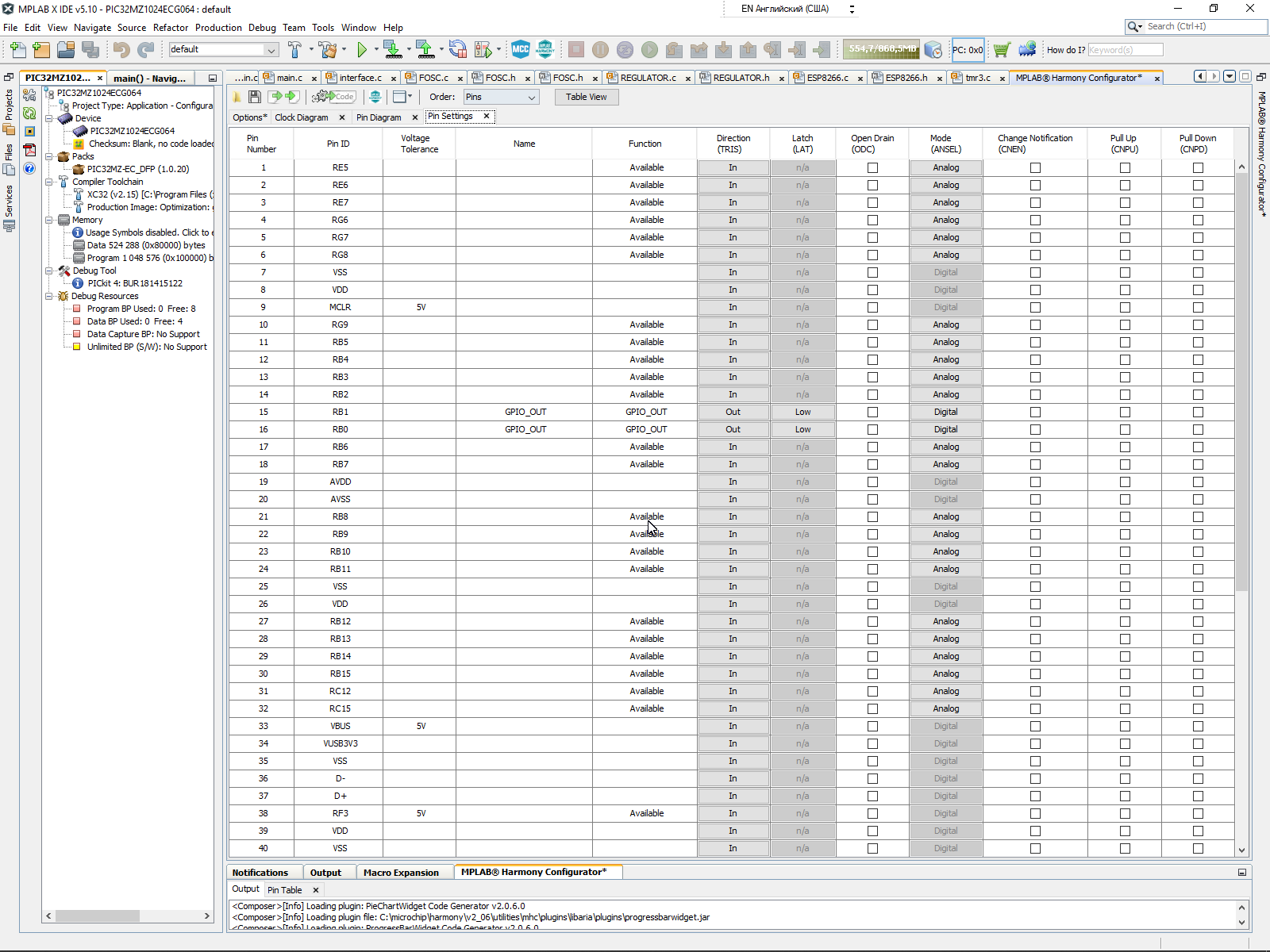
Тут видно возможности настройки портов микроконтроллера (глубоко не копаем). Далее необходимо нажать кнопку генерации проекта, для формирования файлов проекта. Откроется окно в котором конфигуратор спроси, куда необходимо сохранить файл конфигуратор, вы можете изменить место расположения, если в этом нет необходимости просто давим сохранить.
Откроется окно в котором конфигуратор спроси, куда необходимо сохранить файл конфигуратор, вы можете изменить место расположения, если в этом нет необходимости просто давим сохранить.

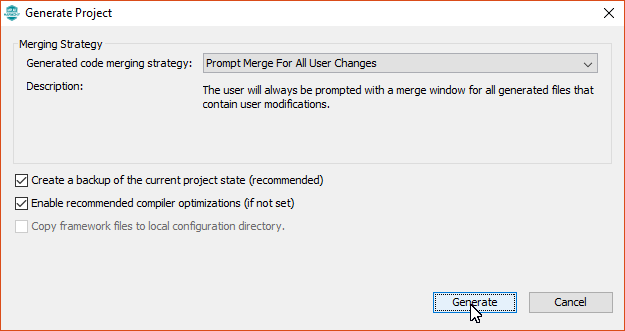
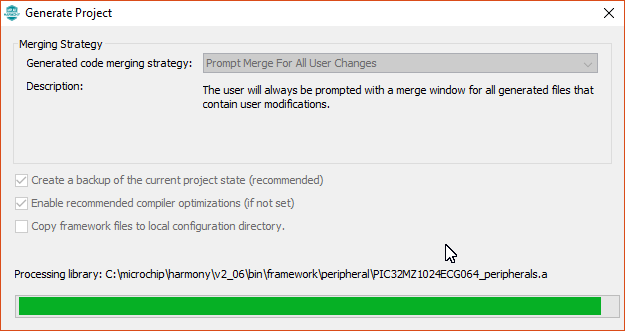
После этого откроется окно с выбором стратегии создания, если пока мы просто нажмем кнопку генерировать и создадим проект.
 На это все претензии к гармонии окончены.
На это все претензии к гармонии окончены.
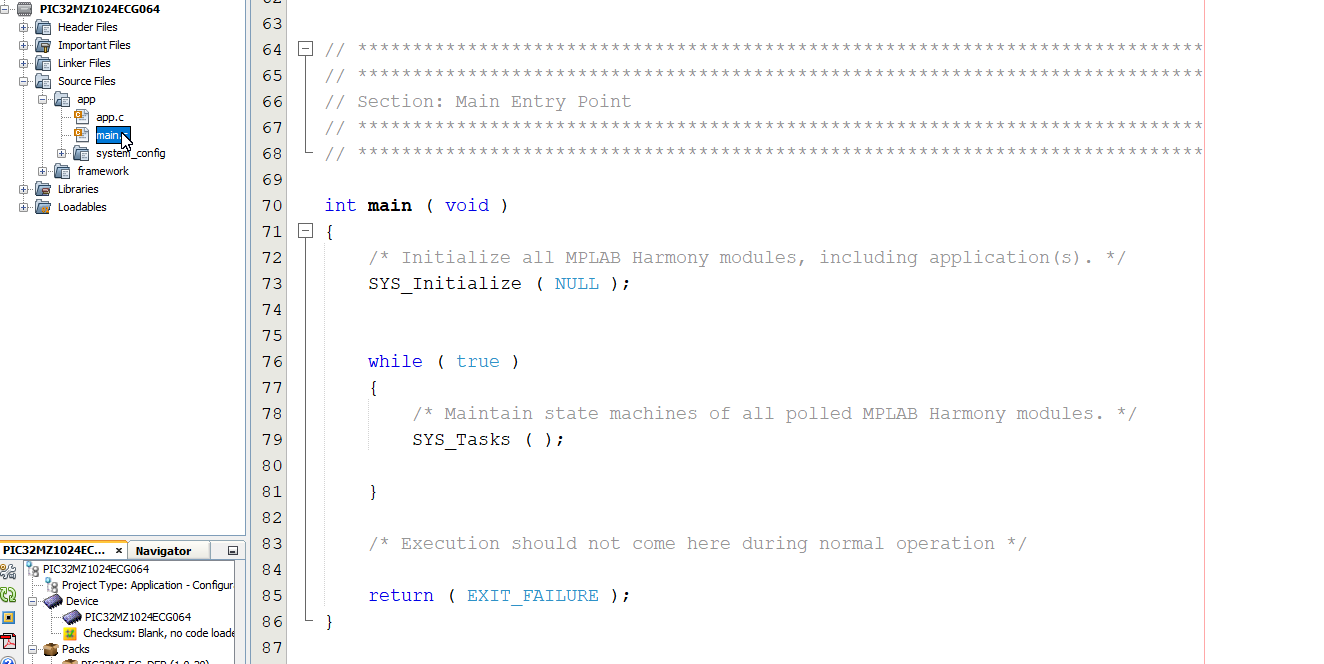
После этого в проекте появятся фалы откроем главный файл.
Чтобы проверить что-то у нас получилось или нет, заставим мигать наши светодиоды. Изменим наш проект следующим образом:
#define Clear_WDT() (WDTCONbits.WDTCLRKEY=0x5743)
#define LED1 LATBbits.LATB0
#define LED2 LATBbits.LATB1
int main ( void )
{
/* Initialize all MPLAB Harmony modules, including application(s). */
SYS_Initialize ( NULL );
// настройка таймера 1 - функция интеграции
PR1 = 0xFFFF; //
T1CONbits.TCKPS = 0b11; // 0b11 = 1:256 prescale value
T1CONbits.ON = 1; // включить
LED1=1;
while ( true )
{
/* Maintain state machines of all polled MPLAB Harmony modules. */
SYS_Tasks ( );
Clear_WDT(); // Сброс
if(TMR1>50000)
{
TMR1=0;
LED1 = !LED1;
LED2 = !LED2;
}
}
/* Execution should not come here during normal operation */
return ( EXIT_FAILURE );
}
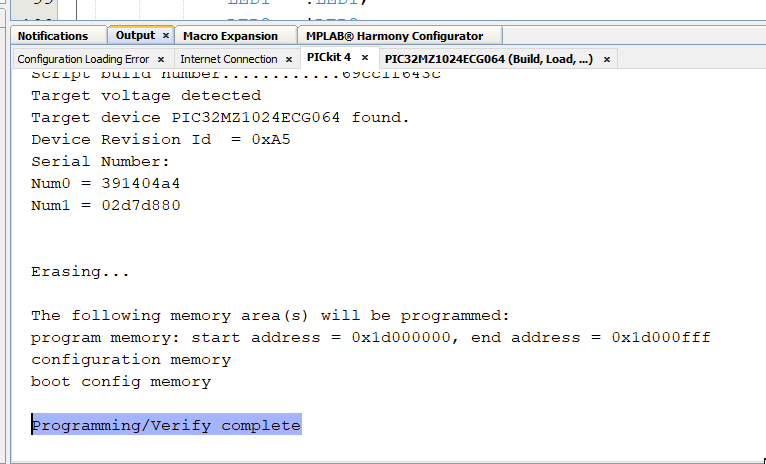
Подключаем программатор к демоплате, и проверяем программирование, нашего микроконтроллера. Светодиоды должны попеременно мигать, с частотой близкой 0,5 герца! Выполнение прошивки МК.
Выполнение прошивки МК.
Демоплата, которую я использовал для тестирования.

Вот так можно, быстро настроит МК для дальнейшей работы и перейти к самой сути проекта.
MPLAB® Harmony - или как это просто! Часть 2. Демопроект Гармони. 209.82 KB 41 downloads
MPLAB® Harmony - или как это просто! Часть 2. Демопроект...В этой главе главное была задача работа на результат и он получен, как? Это пока не важно, но что не так, читайте в Часть третья – копнём немного глубже.
Это может быть интересно
 LM317 и светодиодыViews: 8070 LM317 и светодиоды статья с переработанная с сайта http://invent-systems.narod.ru/LM317.htm Долговечность светодиодов определяется качеством изготовления кристалла, а для белых светодиодов еще и качеством люминофора. В процессе эксплуатации скорость деградации кристалла …
LM317 и светодиодыViews: 8070 LM317 и светодиоды статья с переработанная с сайта http://invent-systems.narod.ru/LM317.htm Долговечность светодиодов определяется качеством изготовления кристалла, а для белых светодиодов еще и качеством люминофора. В процессе эксплуатации скорость деградации кристалла … CLUBBEST-50-LightViews: 384 CLUBBEST-50-LIGHT Зміст Короткий опис проекту. 1 Опис схемотехніки візуалізатора музики. 2 Аудіо вхід. 3 MCU. 4 Цифровий вихід. 5 Схема живлення MCU. 6 Складання пристрою. 7 Список …
CLUBBEST-50-LightViews: 384 CLUBBEST-50-LIGHT Зміст Короткий опис проекту. 1 Опис схемотехніки візуалізатора музики. 2 Аудіо вхід. 3 MCU. 4 Цифровий вихід. 5 Схема живлення MCU. 6 Складання пристрою. 7 Список … Acquaintance with audio-bluetooth modules F-6888 (BK3254).Views: 2271 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, …
Acquaintance with audio-bluetooth modules F-6888 (BK3254).Views: 2271 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, … OLED RET012864E/REX012864JViews: 1566 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как …
OLED RET012864E/REX012864JViews: 1566 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как … VU Meter Tower ART – part 2Views: 1124 Проект – VU Meter Tower ART получил продолжение в своем развитии. Теперь можно заказать набор деталей из акрила для самостоятельной сборки. В проект корпуса внесено целый ряд доработок, …
VU Meter Tower ART – part 2Views: 1124 Проект – VU Meter Tower ART получил продолжение в своем развитии. Теперь можно заказать набор деталей из акрила для самостоятельной сборки. В проект корпуса внесено целый ряд доработок, … Простой сенсорный регулятор светаViews: 2473 Простой сенсорный регулятор. Проект – 2007 года. Регулятор выполнена на микроконтроллере PIC12F683 и имеет минимальное количество элементов. Выполняет стандартные функции, включение выключение света, изменение яркости, запоминание последнего установленного уровня …
Простой сенсорный регулятор светаViews: 2473 Простой сенсорный регулятор. Проект – 2007 года. Регулятор выполнена на микроконтроллере PIC12F683 и имеет минимальное количество элементов. Выполняет стандартные функции, включение выключение света, изменение яркости, запоминание последнего установленного уровня … Универсальный терморегулятор ch-c3000Views: 3138 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в …
Универсальный терморегулятор ch-c3000Views: 3138 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в … Гаджеты для домашней автоматики – Датчик движенияViews: 1472 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет …
Гаджеты для домашней автоматики – Датчик движенияViews: 1472 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет … ESP8266 применение в проектахViews: 3688 (Актуально только для версий прошивки 1.хх) ESP8266 показала себя как надежное и безотказное устройство для обмена данными с применением WIFI. Я использую ESP8266 исключительно через UART, с применением AT …
ESP8266 применение в проектахViews: 3688 (Актуально только для версий прошивки 1.хх) ESP8266 показала себя как надежное и безотказное устройство для обмена данными с применением WIFI. Я использую ESP8266 исключительно через UART, с применением AT … Проект с использованием MCC часть 15Views: 1663 EUSART – Универсальный асинхронный приёмопередатчик (УАПП, англ. Universal Asynchronous Receiver-Transmitter, UART) — узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. … читать на вики. Внесем изменения в нашу схему, …
Проект с использованием MCC часть 15Views: 1663 EUSART – Универсальный асинхронный приёмопередатчик (УАПП, англ. Universal Asynchronous Receiver-Transmitter, UART) — узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. … читать на вики. Внесем изменения в нашу схему, …
Комментарии