Views: 1403
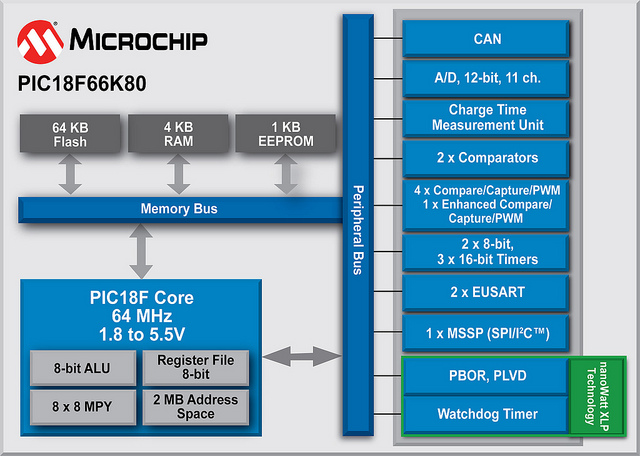
 Библиотека для работы с шиной CAN шиной для PIC-контроллеров 18 серии.
Библиотека для работы с шиной CAN шиной для PIC-контроллеров 18 серии.
V-0.03
Описание функций
Настройка модуля CAN
// инициализация контроллера CAN
void Init_CAN(unsigned int freq, unsigned int filter1, unsigned int filter2, unsigned int filter3, unsigned int filter4, unsigned int filter5, unsigned int filter6);
В этой функции выполняется включение модуля CAN в стандартном режиме и настройка его фильтров.
Автонастройка на скорости передачи
void autospeed (void);
Прием сообщений
void ECAN_Receive(void); // прием данных (вставить в функцию прерывания)
Передача стандартных сообщений из массива const – фиксированные сообщения
void CANS_Transmit_TXB0(const char *str);
Функции настройки
void CAN_EID(int EID, int SID); // ID расширенного сообщения
void CAN_SID(int SID); //ID стандартного сообщения
Установка флагов и задания количества байт
* RTR – флаг дистанционного запроса
* COU – количество байт передачи */
void CAN_RTR_COU(char RTR, char COU);
/* расширенные функции передачи сообщений из буферов TXBUID и TXBUFER*/
/* передача сообщения
* TXB – Номер буфера передачи 0-2
* PRI – Номер приоритета передачи 0-3 */
void CAN_Transmit(char TXB, char PRI);
Библиотека для работы с шиной CAN шиной для PIC18 5.58 KB 653 downloads
Библиотека для работы с шиной CAN шиной для PIC18 ...Это может быть интересно
 Сенсорный выключатель светаViews: 11969 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида …
Сенсорный выключатель светаViews: 11969 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида … Altium Designer – подготовка документации для производства и сборки печатных платViews: 3671 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем …
Altium Designer – подготовка документации для производства и сборки печатных платViews: 3671 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем … AD9833 – Programmable Waveform GeneratorViews: 2834 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить …
AD9833 – Programmable Waveform GeneratorViews: 2834 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить … CLUBBEST-50-LightViews: 271 CLUBBEST-50-LIGHT Зміст Короткий опис проекту. 1 Опис схемотехніки візуалізатора музики. 2 Аудіо вхід. 3 MCU. 4 Цифровий вихід. 5 Схема живлення MCU. 6 Складання пристрою. 7 Список …
CLUBBEST-50-LightViews: 271 CLUBBEST-50-LIGHT Зміст Короткий опис проекту. 1 Опис схемотехніки візуалізатора музики. 2 Аудіо вхід. 3 MCU. 4 Цифровий вихід. 5 Схема живлення MCU. 6 Складання пристрою. 7 Список … MTouch® Модуль Емкостной Библиотеки для MPLAB®X Code Configurator (MCC)Views: 1207 Введение MTouch ® Модуль Емкостной Библиотеки для MPLAB ® X Code Configurator (MCC) позволяет быстро и легко генерировать решение кода на Cи для емкостной сенсорной кнопки, датчика приближения и слайдера.
MTouch® Модуль Емкостной Библиотеки для MPLAB®X Code Configurator (MCC)Views: 1207 Введение MTouch ® Модуль Емкостной Библиотеки для MPLAB ® X Code Configurator (MCC) позволяет быстро и легко генерировать решение кода на Cи для емкостной сенсорной кнопки, датчика приближения и слайдера.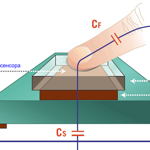 Емкостной сенсорViews: 3008 Изучаем изготовление емкостных сенсоров на PIC-микроконтроллере. Конструкция емкостных сенсоров имеет вид: Емкостные сенсоры строятся по схеме высокочастотного генератора, сам принцип основан на измерение частоты этого генератора. Частота зависит …
Емкостной сенсорViews: 3008 Изучаем изготовление емкостных сенсоров на PIC-микроконтроллере. Конструкция емкостных сенсоров имеет вид: Емкостные сенсоры строятся по схеме высокочастотного генератора, сам принцип основан на измерение частоты этого генератора. Частота зависит … BMP280 – температура и атмосферное давление – учебный проектViews: 2059 Учебный проект на PIC32 и светодиодной панели P5 (2121)-168-6432-80 (32*64). Проект позволяет ознакомиться с простой графикой и с чтением давления и температуры с датчика BMP280. Для тестирования необходимо …
BMP280 – температура и атмосферное давление – учебный проектViews: 2059 Учебный проект на PIC32 и светодиодной панели P5 (2121)-168-6432-80 (32*64). Проект позволяет ознакомиться с простой графикой и с чтением давления и температуры с датчика BMP280. Для тестирования необходимо … Дифференциальный терморегуляторViews: 4002 Дифференциальный терморегулятор ch-3020 Назначение. Ch-c3020 представляет собой дифференциальный терморегулятор. Основное назначение солнечные системы горячего водоснабжения, а также вентиляционные системы управление притоком свежего воздуха. Контроллер позволяет работать пяти режимах. …
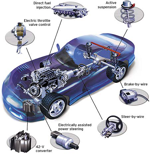
Дифференциальный терморегуляторViews: 4002 Дифференциальный терморегулятор ch-3020 Назначение. Ch-c3020 представляет собой дифференциальный терморегулятор. Основное назначение солнечные системы горячего водоснабжения, а также вентиляционные системы управление притоком свежего воздуха. Контроллер позволяет работать пяти режимах. … Контроллер управления светодиодным освещением с дистанционным управлениемViews: 2013 Все активнее светодиоды входят в нашу жизнь. Всё эффективнее становится светодиодное освещение. Всё ниже опускаются цены. Всё больше появляется возможностей получения сочных цветов, простоты в управлении. Всё чаще …
Контроллер управления светодиодным освещением с дистанционным управлениемViews: 2013 Все активнее светодиоды входят в нашу жизнь. Всё эффективнее становится светодиодное освещение. Всё ниже опускаются цены. Всё больше появляется возможностей получения сочных цветов, простоты в управлении. Всё чаще … Гаджеты для домашней автоматики – Датчик приближенияViews: 1983 Управление светодиодным освещением – Датчик приближения. Данный гаджет предназначен для управления внутренним освещением мебели. Датчик позволяет определить закрытие или открытие дверцы или ящика и при этом включать или …
Гаджеты для домашней автоматики – Датчик приближенияViews: 1983 Управление светодиодным освещением – Датчик приближения. Данный гаджет предназначен для управления внутренним освещением мебели. Датчик позволяет определить закрытие или открытие дверцы или ящика и при этом включать или …