
Views: 564
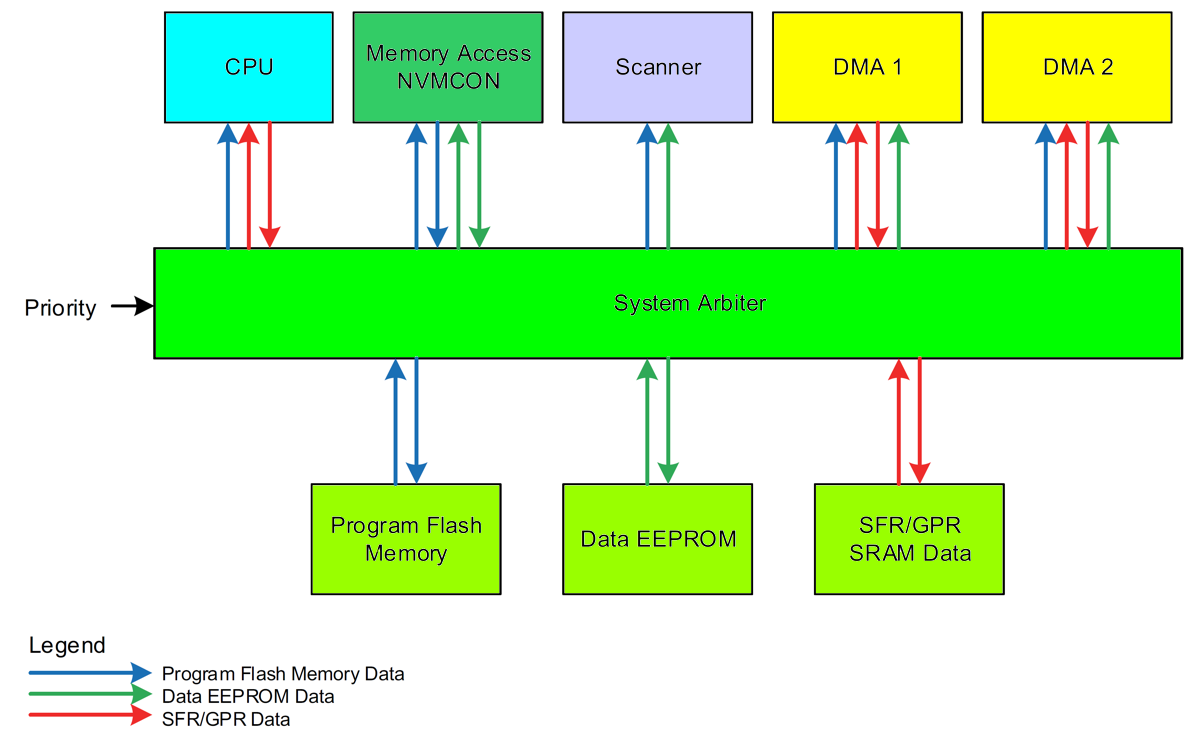
Системный арбитр.
Разрешает доступ к памяти между выборами уровнями системы (т.е. Main, Interrupt Service Routine) и выбором периферийных устройств (т.е. DMA и Scanner) на основе назначенных пользователем приоритетов. Каждый из уровней системы и периферийных устройств имеет свои собственные регистры выбора приоритетов. Приоритет доступа к памяти разрешен с использованием номера, записанного в соответствующие регистры приоритета, 0 – наивысший приоритет, а 4 – самый низкий приоритет. Приоритеты по умолчанию перечислены в таблице 3-1.
Если пользователь хочет изменить приоритеты, убедитесь, что каждый регистр приоритета написан с уникальным значением от 0 до 4.
| Приоритеты по умолчанию | ||||
| Выбор | Значение приоритета по умолчанию после сброса | Регистр | Примечание | |
| Системный уровень | ISR | 0 | SRPR | Система прерываний |
| MAIN | 1 | MAINPR | Процессор | |
| Периферийные модули | DMA1 | 2 | DMA1PR | Модуль DMA 1 |
| DMA2 | 3 | DMA2PR | Модуль DMA 2 | |
| SCANNER | 4 | SCANPR | Сканер памяти программы | |
PIC18(L)F24/25K42 SYSTEM ARBITER BLOCK DIAGRAM
Управления приоритетами.
Настройка приоритетов доступна, только когда бит PRLOCKED регистра PRLOCK не установлен. По умолчанию, после сброса изменения приоритет разрешено. Во время работы желательно запретить изменения приоритетов.
Для блокировки необходимо выполнить следующую последовательность:
// заблокировать изменение приоритета
asm("BCF INTCON0,7"); // запретить прерывания
// последовательность разрешения доступа
asm ("BANKSEL PRLOCK");
asm ("MOVLW 0x55");
asm ("MOVWF PRLOCK");
asm ("MOVLW 0xAA");
asm ("MOVWF PRLOCK");
asm ("BSF PRLOCK, 0"); // установить бит PRLOCKED
asm("BSF INTCON0,7"); // разрешить прерывания
Последовательность разблокировки имеет следующий вид:
// заблокировать изменение приоритета
asm("BCF INTCON0,7"); // запретить прерывания
// последовательность разрешения доступа
asm ("BANKSEL PRLOCK");
asm ("MOVLW 0x55");
asm ("MOVWF PRLOCK");
asm ("MOVLW 0xAA");
asm ("MOVWF PRLOCK");
asm ("BCF PRLOCK, 0"); // сбросить бит PRLOCKED
asm("BSF INTCON0,7"); // разрешить прерывания
Схема доступа к памяти
Пользователь может назначать приоритеты как системному уровню, так и периферийным устройствам, на основе которых системный арбитр предоставляет доступ к памяти. Рассмотрим следующие приоритетные сценарии между ISR, MAIN и периферийными устройствами.
Примечание. Всегда требуется, чтобы приоритет ISR был выше, чем главный приоритет.
ISR PRIORITY > MAIN PRIORITY > PERIPHERAL PRIORITY
Вариант когда приоритет периферии (DMAx, Scanner) ниже чем ISR и MAIN Priority, а периферийное устройство требует:
- Доступ к программной флэш-памяти – периферийное устройство ожидает цикл инструкций, в котором процессор не нуждается в доступе к PFM (например, команда перехода) и использует этот цикл программы для выполнения собственного доступа к Flash Memory, если только не выполняется операция чтения/записи PFM.
- Доступ к SFR/GPR – периферийное устройство ожидает цикл команд, в котором процессор не нуждается в доступе к SFR/GPR (например, MOVLW, CALL, NOP) и использует этот цикл для выполнения собственного доступа к SFR/GPR.
- Доступ к EEPROM данных – периферийное устройство получает доступ к EEPROM данных, если не выполняется операция чтения/записи данных в EEPROM.
Это приводит к минимальной пропускной способности периферийного устройства для доступа к памяти и выполняется этот доступ без какого-либо влияния на время выполнения основной программы.
PERIPHERAL PRIORITY > ISR PRIORITY > MAIN PRIORITY
Когда приоритет периферии (DMAx, Scanner) выше, чем ISR и MAIN Priority, работа процессора останавливается, когда периферийное устройство запрашивает память.
Процессор удерживается в остановленном состоянии до тех пор, пока периферийное устройство выполняет свою работу. Поскольку периферийное устройство запрашивает доступ к шине, периферийное устройство не может быть отключено, пока оно не завершит свою работу.
Это приводит к наивысшей пропускной способности периферийного устройства для доступа к памяти, но требует остановки другого процесса, во время возникновения события запускающего работу периферийного устройства (DMAx, Scanner).
ISR PRIORITY > PERIPHERAL PRIORITY > MAIN PRIORITY
В этом случае процедуры прерывания работы периферийных устройств (DMAx, Scanner) остановят процессор. Прерывания прерывает работу периферийного устройства (DMAx, Scanner) .
Это приводит к наименьшей задержке прерывания и максимальной пропускной способности периферии для доступа к памяти.
PERIPHERAL 1 PRIORITY > ISR PRIORITY > MAIN PRIORITY > PERIPHERAL 2 PRIORITY
В этом случае Peripheral 1 остановит работу процессора. Однако Peripheral 2 может получить доступ к памяти в циклах, не используемых Peripheral 1.
| Управление системным арбитром контролируется с помощью следующих регистров: | |||||||||
| Имя | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | Описание |
| ISRPR | – | – | – | – | – | ISRPR2 | ISRPR1 | ISRPR0 | Приоритет системы прерываний |
| MAINPR | – | – | – | – | – | MAINPR2 | MAINPR1 | MAINPR0 | Приоритет основной программы |
| DMA1PR | – | – | – | – | – | DMA1PR2 | DMA1PR1 | DMA1PR0 | Приоритет модуля DM1 |
| DMA2PR | – | – | – | – | – | DMA2PR2 | DMA2PR1 | DMA2PR0 | Приоритет модуля DMA2 |
| SCANPR | – | – | – | – | – | SCANPR2 | SCANPR1 | SCANPR0 | Приоритет для сканера |
| PRLOCK | – | – | – | – | – | – | – | PRLOCKED | Регистр блокировки настройки приоритетов |
Функция для настройки арбитража может быть выполнена следующим образом:
// настройка приоритета
void PRIORITY (uint8_t isrprre, uint8_t mainprre, uint8_t dma1prre, uint8_t dma2prre, uint8_t scanprre)
{
// разблокировать настройку приоритетов
asm ("BCF INTCON0,7");
asm ("BANKSEL PRLOCK");
asm ("MOVLW 0x55");
asm ("MOVWF PRLOCK");
asm ("MOVLW 0xAA");
asm ("MOVWF PRLOCK");
asm ("BSF PRLOCK, 0");
asm ("BCF INTCON0,7");
// система
// приоритет прерываний (приоритета приоритета обслуживания прерывания)
ISRPR = isrprre;
// приоритет выполнения программы (выбор приоритета основного режима)
MAINPR = mainprre;
// переферия
// приоритет модуля DMA1
DMA1PR = dma1prre;
// приоритет модуля DMA2
DMA2PR = dma2prre;
// приоритет сканера памяти
SCANPR = scanprre;
// заблокировать изменение приоритета
asm ("BCF INTCON0,7");
asm ("BANKSEL PRLOCK");
asm ("MOVLW 0x55");
asm ("MOVWF PRLOCK");
asm ("MOVLW 0xAA");
asm ("MOVWF PRLOCK");
asm ("BSF PRLOCK, 0");
asm ("BSF INTCON0,7");
}
Это может быть интересно
 Самый простой диммер для светодиодного освещенияViews: 3010 Светодиоды все больше входят в нашу жизнь как источники освещения и как само собой разумеющееся, это вопрос регулировки яркости. Существует множество схемных решений, но в нашем варианте мы …
Самый простой диммер для светодиодного освещенияViews: 3010 Светодиоды все больше входят в нашу жизнь как источники освещения и как само собой разумеющееся, это вопрос регулировки яркости. Существует множество схемных решений, но в нашем варианте мы … Светодиоды со встроенным драйвером WS2812BViews: 924 Производитель http://www.world-semi.com Краткое описание продукции фирмы Каталог продукции” catcatcat_ws_19 catcatcat_ws_15 catcatcat_ws_11 catcatcat_ws_07 catcatcat_ws_03 catcatcat_ws_18 catcatcat_ws_14 catcatcat_ws_10 catcatcat_ws_06 catcatcat_ws_02 catcatcat_ws_05 catcatcat_ws_09 catcatcat_ws_13 catcatcat_ws_17 catcatcat_ws_16 catcatcat_ws_12 catcatcat_ws_08 catcatcat_ws_04 catcatcat_ws_01 This jQuery …
Светодиоды со встроенным драйвером WS2812BViews: 924 Производитель http://www.world-semi.com Краткое описание продукции фирмы Каталог продукции” catcatcat_ws_19 catcatcat_ws_15 catcatcat_ws_11 catcatcat_ws_07 catcatcat_ws_03 catcatcat_ws_18 catcatcat_ws_14 catcatcat_ws_10 catcatcat_ws_06 catcatcat_ws_02 catcatcat_ws_05 catcatcat_ws_09 catcatcat_ws_13 catcatcat_ws_17 catcatcat_ws_16 catcatcat_ws_12 catcatcat_ws_08 catcatcat_ws_04 catcatcat_ws_01 This jQuery … 12-BIT A/D CONVERTER WITH THRESHOLD DETECT на примере PIC24FJ128GA204Views: 820 Введение. 12-битный модуль A/D Converter является усовершенствованной версией 10-битного модуля, предлагаемого на некоторых устройствах PIC24. Оба модуля являются преобразователями, в своих ядрах, с последовательным приближением (SAR), в окружении …
12-BIT A/D CONVERTER WITH THRESHOLD DETECT на примере PIC24FJ128GA204Views: 820 Введение. 12-битный модуль A/D Converter является усовершенствованной версией 10-битного модуля, предлагаемого на некоторых устройствах PIC24. Оба модуля являются преобразователями, в своих ядрах, с последовательным приближением (SAR), в окружении … Бегущие огни на WS2812BViews: 4842 В настоящее время большой популярностью стали пользоваться светодиоды со встроенным драйвером WS2812B. Текущий проект предназначен показать возможность использования и управления этими светодиодами. Это и проект и исследование по …
Бегущие огни на WS2812BViews: 4842 В настоящее время большой популярностью стали пользоваться светодиоды со встроенным драйвером WS2812B. Текущий проект предназначен показать возможность использования и управления этими светодиодами. Это и проект и исследование по … Инфракрасный датчик движения, PIR-sensorViews: 3078 Домашняя автоматика предполагает наличие датчиков движения, которые способны контролировать движения человека. Самым простым и доступным устройством позволяющие контролировать изменения ИК-излучения, это ПИР-сенсоры. На текущий момент доступны не дорогие модели D203B, D204B, D205B. Все …
Инфракрасный датчик движения, PIR-sensorViews: 3078 Домашняя автоматика предполагает наличие датчиков движения, которые способны контролировать движения человека. Самым простым и доступным устройством позволяющие контролировать изменения ИК-излучения, это ПИР-сенсоры. На текущий момент доступны не дорогие модели D203B, D204B, D205B. Все … Real-time music visualization technologyViews: 113 Music visualization technology in real time (RTMV-technology). Я не музикант і я не маю спеціальної музичної освіти, я інженер розробник вбудованих систем. Але моє хобі розроблення технології візуалізації …
Real-time music visualization technologyViews: 113 Music visualization technology in real time (RTMV-technology). Я не музикант і я не маю спеціальної музичної освіти, я інженер розробник вбудованих систем. Але моє хобі розроблення технології візуалізації … LM317 и светодиодыViews: 7830 LM317 и светодиоды статья с переработанная с сайта http://invent-systems.narod.ru/LM317.htm Долговечность светодиодов определяется качеством изготовления кристалла, а для белых светодиодов еще и качеством люминофора. В процессе эксплуатации скорость деградации кристалла …
LM317 и светодиодыViews: 7830 LM317 и светодиоды статья с переработанная с сайта http://invent-systems.narod.ru/LM317.htm Долговечность светодиодов определяется качеством изготовления кристалла, а для белых светодиодов еще и качеством люминофора. В процессе эксплуатации скорость деградации кристалла … Униполярный шаговый двигательViews: 2183 В приводах различных устройств часто применяются шаговые двигатели, Шаговый двигатели различают двух типов униполярные – когда обмотки коммутируются током текущим только в одну сторону, например при …
Униполярный шаговый двигательViews: 2183 В приводах различных устройств часто применяются шаговые двигатели, Шаговый двигатели различают двух типов униполярные – когда обмотки коммутируются током текущим только в одну сторону, например при … Проект с использованием MCC часть 11Views: 850 Можно несколько облагородить программу вынести наши процедуры обработки нажатия кнопок в отдельные функции. Но вы должны понимать, что это хоть и не значительно, но будет тормозить общую скорость …
Проект с использованием MCC часть 11Views: 850 Можно несколько облагородить программу вынести наши процедуры обработки нажатия кнопок в отдельные функции. Но вы должны понимать, что это хоть и не значительно, но будет тормозить общую скорость … Модуль CAN в микроконтроллерах PIC18Views: 5720 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований …
Модуль CAN в микроконтроллерах PIC18Views: 5720 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований …