Views: 1564
 Еще раз про энкодер…
Еще раз про энкодер…
Для некоторых приложений очень удобно и экономически выгодно, для настройки и управления использовать энкодер. Такие энкодеры имеют строенную тактовую кнопку которую можно применить для выбора режимов работы устройства. В настоящей статье пойдет речь об энкодерах формирующих код “Грея”. Их формируемая последовательность несколько отличается от классической.
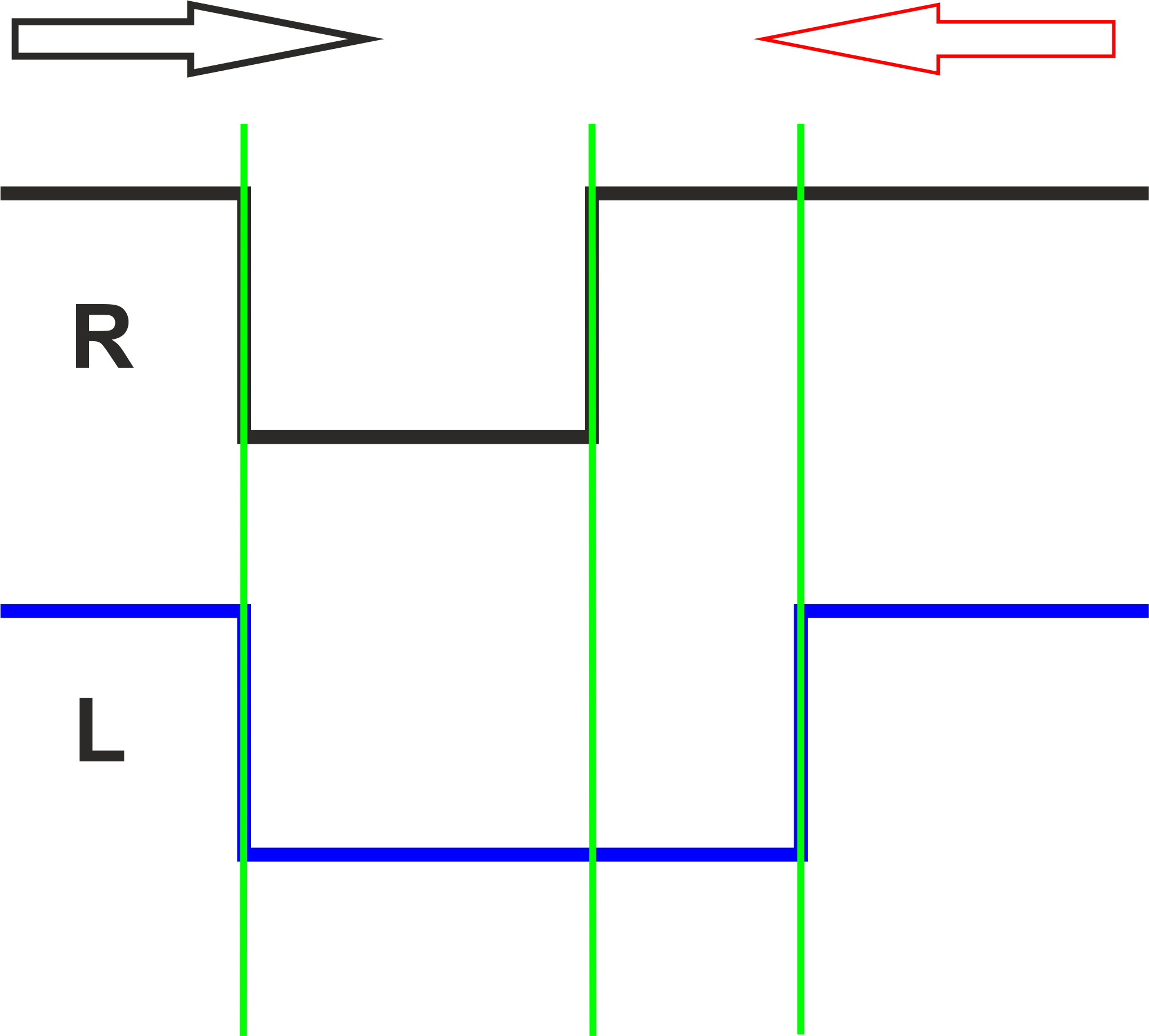
Принцип обработки данных с такого энкодера прост. Вся работа происходит по прерываниях формируемых с портов микроконтроллера к которому он подключен. Мы должны иметь данные с текущего прерывания и с предыдущего. Обрабатывать данные когда состояния контактов R и L при этом вращение в “право” (условно) когда предыдущие флаги имеют высокий уровень, вращение “влево” когда предыдущее прерывание в право низкий, а влево высокий.
Подключение энкодера:
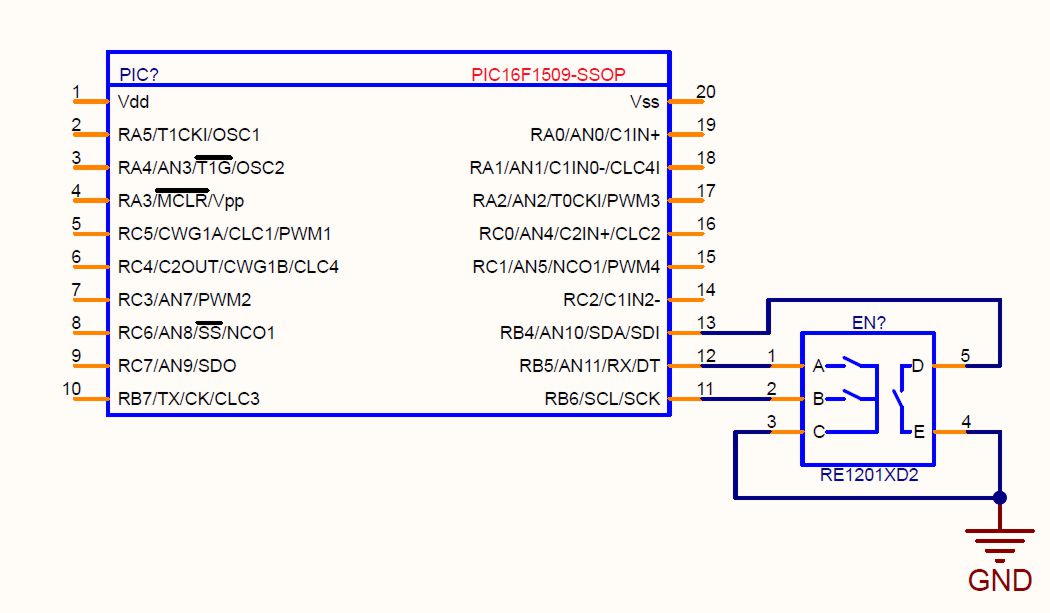 Подключение выполним к портам которые имеют свойства формировать прерывание по изменению состояния. Их можно выбрать из таблицы описания ног микроконтроллера. Для PIC16F1509 выглядит так:
Подключение выполним к портам которые имеют свойства формировать прерывание по изменению состояния. Их можно выбрать из таблицы описания ног микроконтроллера. Для PIC16F1509 выглядит так:
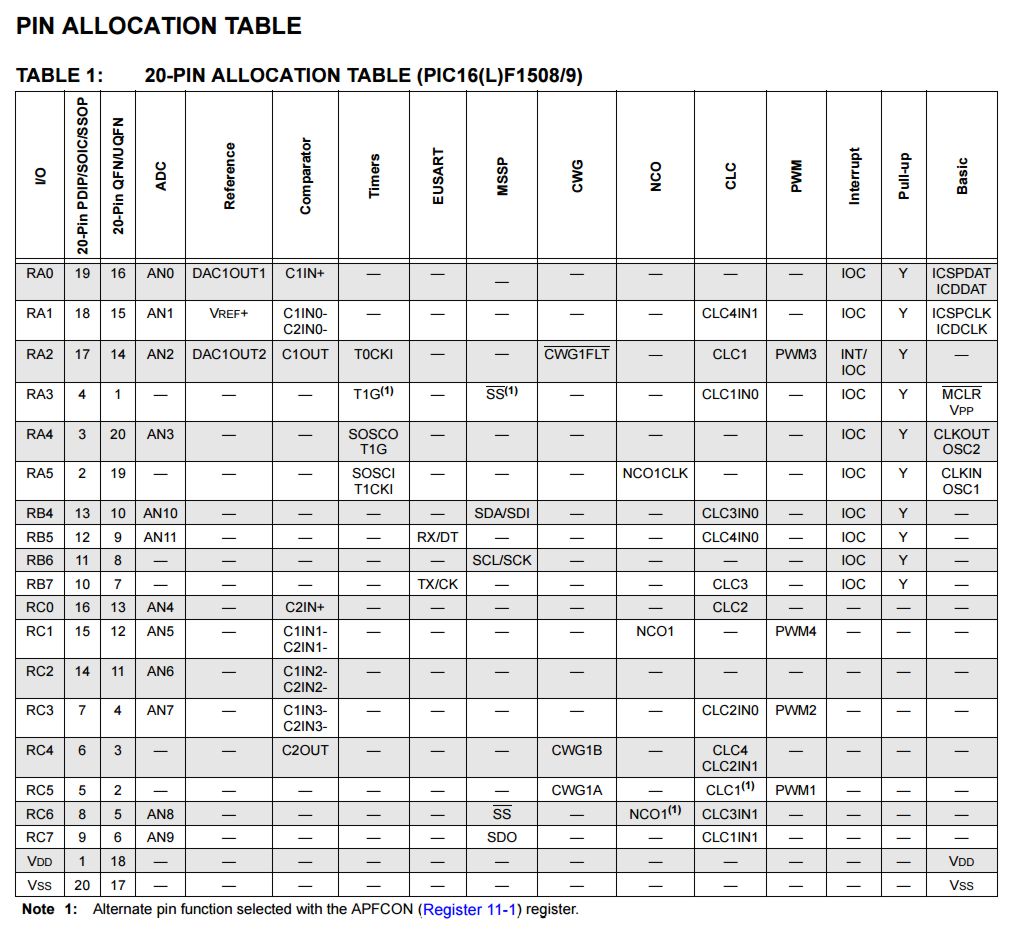
В колонке Interrupt где стоит символ IOC напротив вывода можно использовать для работы с энкодером, дополнительно необходимо обратить внимание на колонку Pull-up. На понадобятся включение подтягивающих резисторов, для формирования на входах высокого уровня сигнала, когда контакты энкодера находятся в неактивном состоянии.
Создадим проект с использованием MPLAB® Code Configurator.
Работу начнем стандартно после окончания работы мастера мы должны получить пустой проект:

Запустим MPLAB® Code Configurator:

Нас интересуют конфигурация выводов, выберем

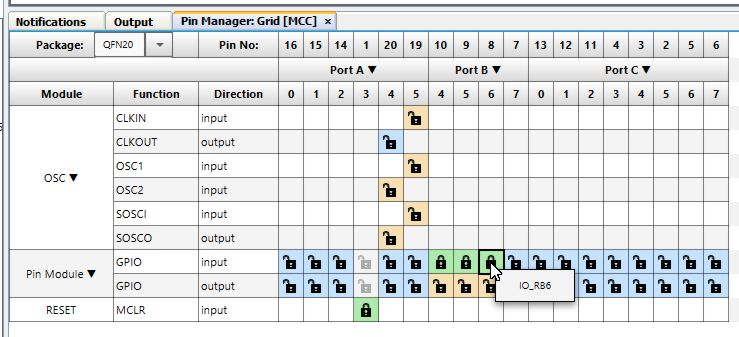
В менеджере пинов отметим порты RD4/RB5/RB6 что будем использовать как входы:
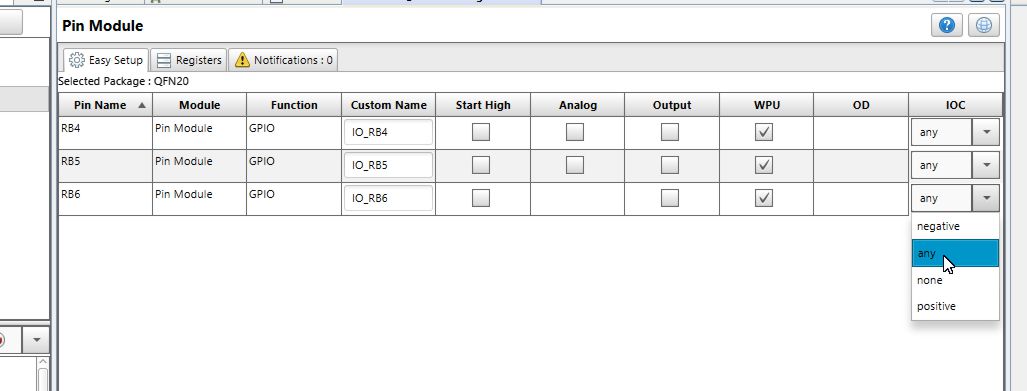
В окне Модуль пинов настроим свойства, обратите внимание на включение подтягивающих резисторов WPU, а также тип прерывания, новые микроконтроллеры позволяют выбирать положительное или отрицательное событие или любое, но старые серии различают просто прерывание по входу и тип необходимо определять дополнительно. Но с целью универсальности применим тип “любой”, чтобы проект можно было использовать на любом микроконтроллере.
Выполним генерацию:
Наш проект получит следующие файлы:
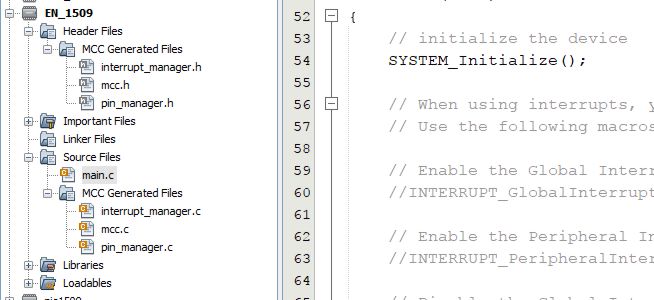
Откроем файл pin_manager.c МСС выполнил полностью настройку портов и прерываний
/**
IOCx registers
*/
// interrupt on change for group IOCBF - flag
IOCBFbits.IOCBF4 = 0;
IOCBFbits.IOCBF5 = 0;
IOCBFbits.IOCBF6 = 0;
// interrupt on change for group IOCBN - negative
IOCBNbits.IOCBN4 = 1;
IOCBNbits.IOCBN5 = 1;
IOCBNbits.IOCBN6 = 1;
// interrupt on change for group IOCBP - positive
IOCBPbits.IOCBP4 = 1;
IOCBPbits.IOCBP5 = 1;
IOCBPbits.IOCBP6 = 1;
// register default IOC callback functions at runtime; use these methods to register a custom function
IOCBF4_SetInterruptHandler(IOCBF4_DefaultInterruptHandler);
IOCBF5_SetInterruptHandler(IOCBF5_DefaultInterruptHandler);
IOCBF6_SetInterruptHandler(IOCBF6_DefaultInterruptHandler);
// Enable IOCI interrupt
INTCONbits.IOCIE = 1;
Он так-же предлагает обработку этих прерываний, по каждому выводу отдельно, но у нас эти функции использовать нет необходимости. Саму обработку прерываний мы можем как обычно видеть в файле interrupt_manager.c
void interrupt INTERRUPT_InterruptManager (void)
{
// interrupt handler
if(INTCONbits.IOCIE == 1 && INTCONbits.IOCIF == 1)
{
PIN_MANAGER_IOC();
}
else
{
//Unhandled Interrupt
}
}
Для удобства опишем порты подключения энкодера в файле pin_manager.c:
#include "../mcc_generated_files/mcc.h" // значение тактовой //#define FCY _XTAL_FREQ/2 // для макросов задержки //------------------------------------------------------------------------------ // для функции энкодера bool DIRLp, DIRRp, FMINUS, FPLUS, FBUTTON, FBUTTON1; // флаги направления вращения /*таймер определения двойного нажатия кнопки энкодкра*/ int timeeREPEAT; // таймер повторного нажатия int click_counter; // счетчик нажатий кнопки /*описание выводов энкодера*/ #define DIRR PORTBbits.RB5 // #define DIRL PORTBbits.RB6 // #define BUTTON PORTBbits.RB4 // #define CONBUT 50 //константа задержки последовательности нажатия кнопки //------------------------------------------------------------------------------
Для обработки энкодера изменим функцию PIN_MANAGER_IOC, добавим строки:
//------------------------------------------------------------------------------
bool SDIRR, SDIRL, SENB; // описание флагов
__delay_us(200);
SDIRR=DIRR; // сосчитать положение энкодера
SDIRL=DIRL;
// для вращения сравниваем настоящее состотояние с предыдущим
// (код Грея)
if(!SDIRR && !SDIRL && DIRRp && DIRLp)
{
FPLUS=1; // признак вращения вправо
}
else if(!SDIRR && !SDIRL && !DIRRp && DIRLp)
{
FMINUS=1; // признак вращения влево
}
else if(!BUTTON)// обработка нажатия кнопки
{
__delay_ms(10); // подавление дребезга
SENB=BUTTON;
if(!BUTTON && !timeeREPEAT)
{
FBUTTON1=1; // признак нажатия кнопки энкодера
timeeREPEAT=CONBUT; // инициализация таймера
click_counter=0;//
}
else if(!SENB && timeeREPEAT)
{
click_counter++; // подсчитываем количество нажатий
timeeREPEAT=CONBUT; // инициализация таймера
}
}
DIRRp=SDIRR; // запомнить предыдущее состояние
DIRLp=SDIRL;
// Clear the flag
INTCONbits.IOCIF=0;
При возникновении прерываний, запомним состояние входов (__delay_us(200); необходим для предварительного фильтрации звона механики). Далее выполняем логическую определения направления вращения энкодера:
if(!SDIRR && !SDIRL && DIRRp && DIRLp)
{
FPLUS=1; // признак вращения вправо
}
else if(!SDIRR && !SDIRL && !DIRRp && DIRLp)
{
FMINUS=1; // признак вращения влево
}
Для энкодера с “обычным” кодированием, вариант определения направления:
// для вращения сравниваем настоящее состотояние с предыдущим
// if(!SDIRR && !SDIRL && DIRRp && DIRLp) // (код Грея)
if(SDIRR && SDIRL && !DIRRp && DIRLp) // (обычный режим)
{
FPLUS=1; // признак вращения вправо
}
// else if(!SDIRR && !SDIRL && !DIRRp && DIRLp) // (код Грея)
else if(!SDIRR && !SDIRL && !DIRRp && DIRLp) // (обычный режим)
{
FMINUS=1; // признак вращения влево
}
По окончанию прерываний необходимо запомнить текущее состояние флагов:
DIRRp=SDIRR; // запомнить предыдущее состояние
DIRLp=SDIRL;
На этом было бы все если бы все ограничивалось энкодерами без тактовой кнопки. Для управления тактовой кнопкой добавим не только функцию контроля нажатия кнопки, но и счетчик нажатий, это может быть удобно для организации много уровненных функций. Для контроля обработки нажатий кнопки нам потребуется ввести дополнительную задержку в 10 мС для подавления дребезга. Для подсчета нажатий необходимо будет воспользоваться таймером, для определения времени в котором определяется функция нажатия кнопки.
Логика работы проста, нажимается кнопка, инициализация таймера, пока идет отсчет времени, если следующее нажатие происходит до окончания работы таймера, то выполняется подсчет нажатий, если таймер “отработал” формируется флаг нажатия кнопки и пользователь может определить количество выполненных нажатий.
Перейдем в МСС. Для настройки функций таймера надо определиться с системным генератором (что мы не сделали в начале):
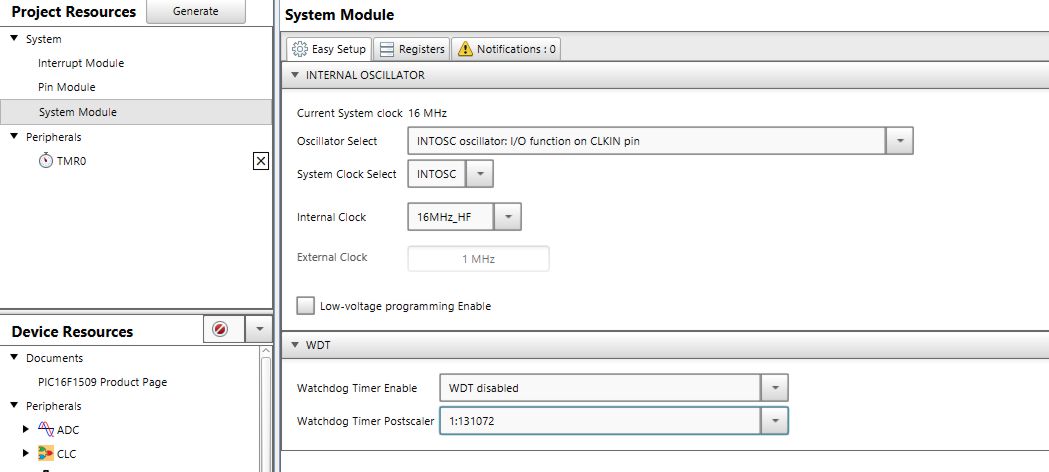
Выберем внутренний генератор, тактовая 16 мГц. Настроим таймер 0 для формирования временных интервалов:
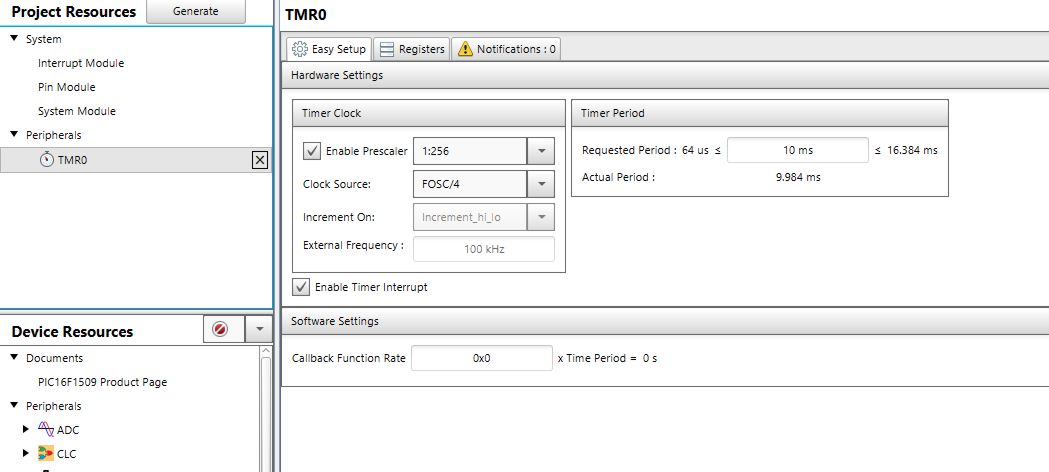
Настроим таймер на период 10 мС, для этого выберем делитель 1:256, синхронизацию от системного генератора FOSC/4, зададим в окне периода таймера 10 mc, реально получим 9.984 mc. Установим опцию активировать прерывание от таймера. Выполним генерацию кода:
В функцию INTERRUPT_InterruptManager (файл interrupt_manager.c) будет добавлен блок для таймера:
void interrupt INTERRUPT_InterruptManager (void)
{
// interrupt handler
if(INTCONbits.TMR0IE == 1 && INTCONbits.TMR0IF == 1)
{
TMR0_ISR();
}
else if(INTCONbits.IOCIE == 1 && INTCONbits.IOCIF == 1)
{
PIN_MANAGER_IOC();
}
else
{
//Unhandled Interrupt
}
}
В функцию TMR0_ISR(); добавим обработку нашего таймера:
void TMR0_ISR(void)
{
// Clear the TMR0 interrupt flag
INTCONbits.TMR0IF = 0;
TMR0 = timer0ReloadVal;
if(TMR0_InterruptHandler)
{
TMR0_InterruptHandler();
}
// add your TMR0 interrupt custom code
//--------------------------------------------------------------------------
if(timeeREPEAT)timeeREPEAT--; // обработка таймера
else if(FBUTTON1)
{
FBUTTON1=0;
FBUTTON=1; // установить флаг нажатие кнопки
}
//--------------------------------------------------------------------------
}
Не забудьте, что-бы переменные из файла pin_manager.c были доступны в файле tmr0.c их надо описать как внешние. В файле pin_manager.h добавьте строки:
#include "stdbool.h" // для определения булевых функций //------------------------------------------------------------------------------ // для функции энкодера extern bool FMINUS, FPLUS, FBUTTON, FBUTTON1; // флаги направления вращения /*таймер определения двойного нажатия кнопки энкодкра*/ extern int timeeREPEAT; // таймер повторного нажатия extern int click_counter; // счетчик нажатий кнопки //------------------------------------------------------------------------------
И подключите его к файлу tmr0.c добавив в заголовок:
#include "pin_manager.h"
Имея в своём распоряжении флаги вращение в право FPLUS, вращение влево FMINUS. нажатие кнопки FBUTTON, а также счетчик нажатий click_counter, можно строить разнообразные системы управления на энкодере.
Пример функции получения данных с энкодера может такой:
//------------------------------------------------------------------------------
void Encoder (void) // обработка параметра энкодером
{
// контроль вращения энкодера
if(FPLUS)
{
FPLUS=0; // сбросить флаг
if(value<30000) value++; // увеличить параметр
}
else if(FMINUS)
{
FMINUS=0; //сбросить флаг
if(value>-30000)value--; // уменьшить параметр
}
else if(FBUTTON) // функции кнопки
{
if(!click_counter) // для 1 клика
{
value=0; // установить парметрв ноль
}
else if(click_counter==1) // для двойного клика
{
value=10; //.................
}
else if(click_counter==2) // для тройного
{
value=10;
}
// else if(click_counter==3) // 4 клика
// {
//
// }
// else if(click_counter==4) value=40;
// else if(click_counter==5) value=50;
FBUTTON=0;
}
}
//------------------------------------------------------------------------------
Проект для тестирования
MPLAB® Code Configurator and Encoder 317.13 KB 115 downloads
Пример создания кода для управления функциями...Это может быть интересно
 Ultrasonic Level Meters – ULM –53LViews: 763 Измерение расстояния при помощи ультра звукового датчика ULM–53L–10. Диапазон измерения от 0,5 м до 10 м, полностью пластмассовый излучатель PVDF, механическое соединение фланцем из полиэтилена HDPE (исполнение “N”) Характеристики …
Ultrasonic Level Meters – ULM –53LViews: 763 Измерение расстояния при помощи ультра звукового датчика ULM–53L–10. Диапазон измерения от 0,5 м до 10 м, полностью пластмассовый излучатель PVDF, механическое соединение фланцем из полиэтилена HDPE (исполнение “N”) Характеристики … WiFi ESP8266 – AT команды связанные с функцией TCP/IP (v.1.6.1)Views: 5230 AT команды связанные с функцией TCP/IP В этом разделе описаны команды которые позволяют устанавливать соединения между серверами и клиентами в сети. Приведено описание команд и примеры их выполнения. …
WiFi ESP8266 – AT команды связанные с функцией TCP/IP (v.1.6.1)Views: 5230 AT команды связанные с функцией TCP/IP В этом разделе описаны команды которые позволяют устанавливать соединения между серверами и клиентами в сети. Приведено описание команд и примеры их выполнения. … ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 6051 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. …
ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 6051 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. … ch-4060 – регулятор температуры и влажности на датчике DHT11/DHT22/AM2302Views: 2469 На плате ch-4000 очень легко собрать устройство регулятора температуры и влажности. Датчик DHT11 самый недорогой вариант для создания такого устройства, правда точность его не велика, но для бытовых устройств …
ch-4060 – регулятор температуры и влажности на датчике DHT11/DHT22/AM2302Views: 2469 На плате ch-4000 очень легко собрать устройство регулятора температуры и влажности. Датчик DHT11 самый недорогой вариант для создания такого устройства, правда точность его не велика, но для бытовых устройств … Проект с использованием MCC часть 06Views: 1405 Изменим схему следующим образом добавим две тактовые кнопки BT1 и BT2. Теперь переключимся на конфигурацию выводов, для этого сделаем двойной клик в окне Ресурсы проекта на Pin Module. …
Проект с использованием MCC часть 06Views: 1405 Изменим схему следующим образом добавим две тактовые кнопки BT1 и BT2. Теперь переключимся на конфигурацию выводов, для этого сделаем двойной клик в окне Ресурсы проекта на Pin Module. … DS18B20 – удаленный контроль температурыViews: 3201 Контроль температуры с использованием датчиков температуры DS18B20 и платы ILLISSI-4B-09-primum Проект позволяет подключать к плате ILLISSI-4B-09-primum до 16 датчиков температуры DS18B20, удаленных более 300 метров, и выводить информацию …
DS18B20 – удаленный контроль температурыViews: 3201 Контроль температуры с использованием датчиков температуры DS18B20 и платы ILLISSI-4B-09-primum Проект позволяет подключать к плате ILLISSI-4B-09-primum до 16 датчиков температуры DS18B20, удаленных более 300 метров, и выводить информацию … Проект с использованием MCC часть 15Views: 1664 EUSART – Универсальный асинхронный приёмопередатчик (УАПП, англ. Universal Asynchronous Receiver-Transmitter, UART) — узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. … читать на вики. Внесем изменения в нашу схему, …
Проект с использованием MCC часть 15Views: 1664 EUSART – Универсальный асинхронный приёмопередатчик (УАПП, англ. Universal Asynchronous Receiver-Transmitter, UART) — узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. … читать на вики. Внесем изменения в нашу схему, … Проблемы классической светомузыкиViews: 2145 Светомузыка – что это такое? Определение: Светомузыка (жаргонное: цветомузыка) — вид искусства, основанный на способности человека ассоциировать звуковые ощущения со световыми восприятиями. Такое явление в неврологии получило название …
Проблемы классической светомузыкиViews: 2145 Светомузыка – что это такое? Определение: Светомузыка (жаргонное: цветомузыка) — вид искусства, основанный на способности человека ассоциировать звуковые ощущения со световыми восприятиями. Такое явление в неврологии получило название … Инфракрасный датчик движения, PIR-sensorViews: 3235 Домашняя автоматика предполагает наличие датчиков движения, которые способны контролировать движения человека. Самым простым и доступным устройством позволяющие контролировать изменения ИК-излучения, это ПИР-сенсоры. На текущий момент доступны не дорогие модели D203B, D204B, D205B. Все …
Инфракрасный датчик движения, PIR-sensorViews: 3235 Домашняя автоматика предполагает наличие датчиков движения, которые способны контролировать движения человека. Самым простым и доступным устройством позволяющие контролировать изменения ИК-излучения, это ПИР-сенсоры. На текущий момент доступны не дорогие модели D203B, D204B, D205B. Все … Altium Designer – создание рисунков на печатной платеViews: 3447 Для создание рисунков на печатной платы в Altium Designer можно использовать возможность использовать в Altium Designer сторонних скриптов. Мне возможность эта очень понравилась и я решил её расшарить …
Altium Designer – создание рисунков на печатной платеViews: 3447 Для создание рисунков на печатной платы в Altium Designer можно использовать возможность использовать в Altium Designer сторонних скриптов. Мне возможность эта очень понравилась и я решил её расшарить …