Views: 222
Функции Библиотеки
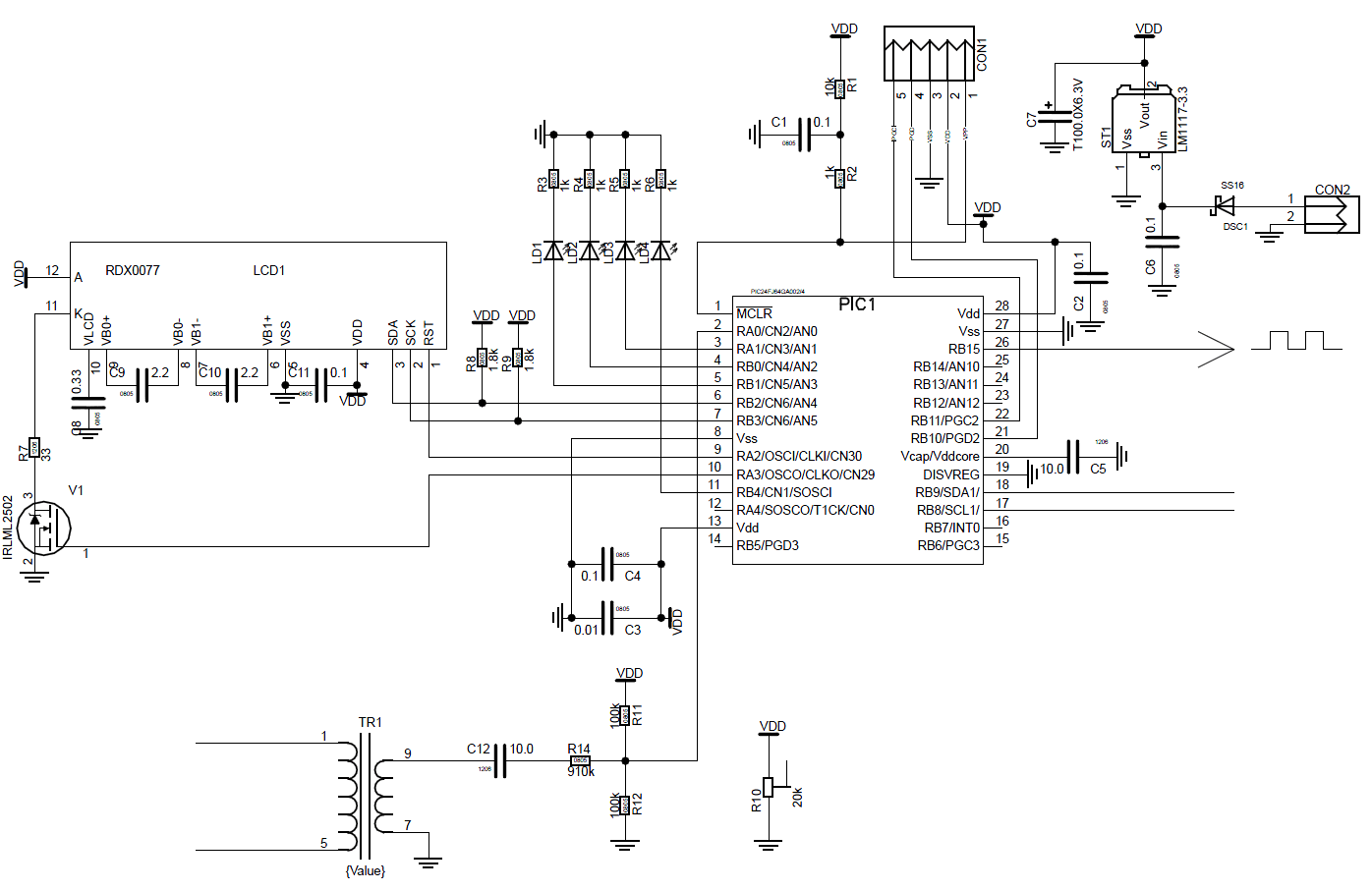
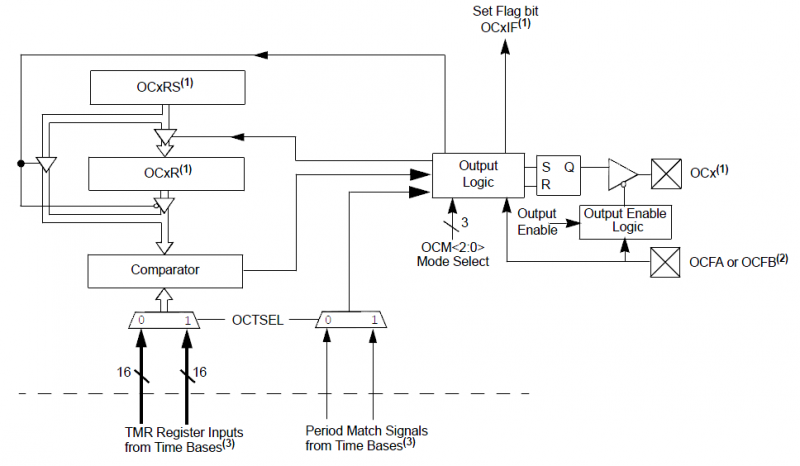
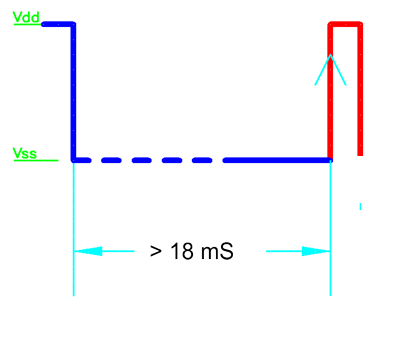
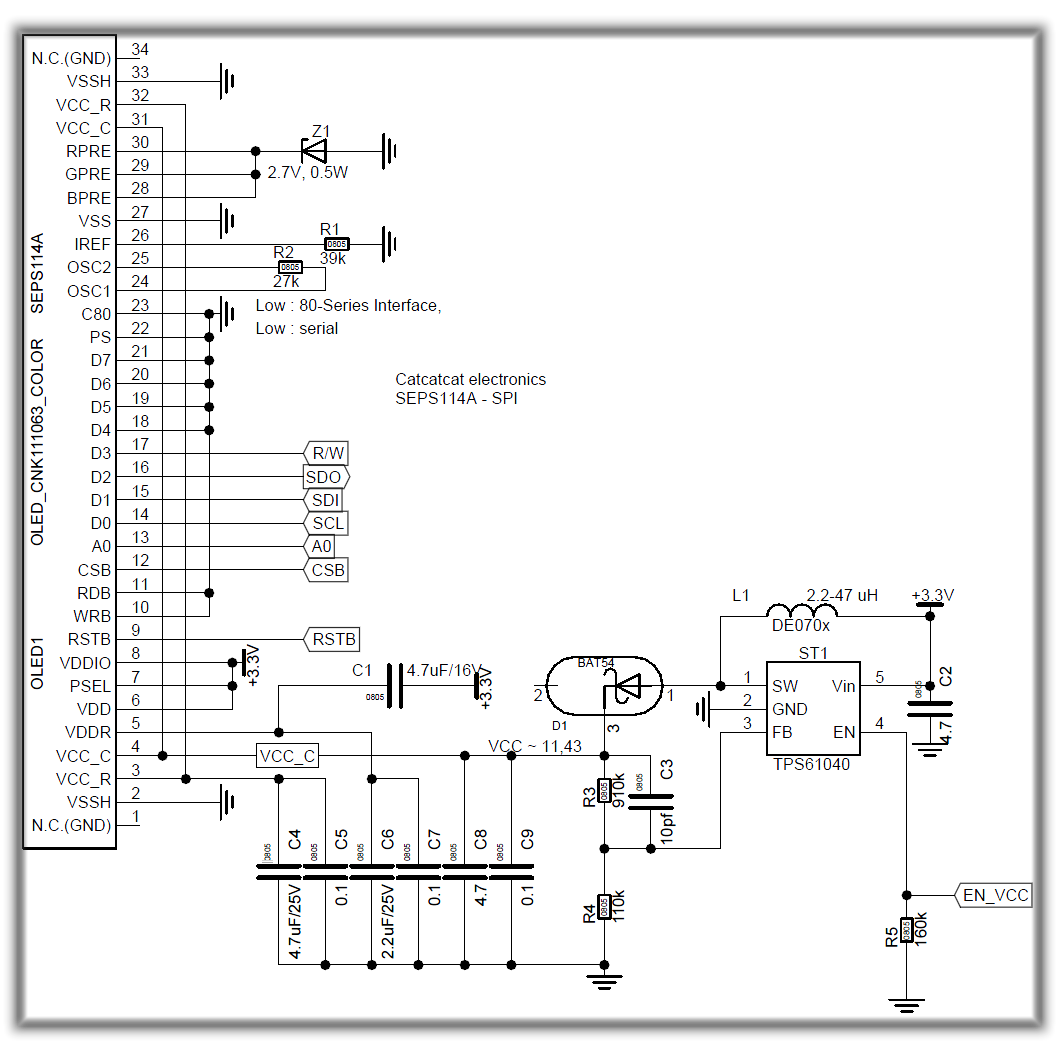
Схема подключения индикатора по интерфейсу SPI.
void SPI2_ON (void); // инициализация SPI2
void OledInt (void); // инициализация драйвера дисплея
void OledFic_read (void); // фиктивное чтение данных, для эмуляции автоприращения
void OledWriteCom (int IR, int datain); // запись команды управления драйвером
void OledEnVcc (int enable_disable); // выключение/включение внешнего DC/DC преобразователя/off / on the external DC / DC converter
void OledData (void); // установка обращению к регистру данных изображения
void OledPict (void); // запись точки в DDRAM (цветом установленным для рисунка)
void OledFon (void); // запись точки фона в DDRAM (цветом установленным для фона)
расширенная задание рабочих цветов
необходимо ввести цвет рисунка, и фона в формате RGB (0-255)
void OledColorSet (unsigned char Rr, unsigned char Gr, unsigned char Br,unsigned char Rf, unsigned char Gf, unsigned char Bf);
Компактная настройка цвета
необходимо ввести цвет рисунка, и фона в формате 0-15
номер цвета R G B R G B
0-Black (черный) #000000 (000,000,000)
1-Maroon (темно-бордовый) #800000 (128,000,000)
2-Red (красный) #FF0000 (255,000,000)
3-Green (зеленый) #008000 (000,128,000)
4-Lime (ярко-зеленый) #00FF00 (000,255,000)
5-Olive (оливковый) #808000 (128,128,000)
6-Yellow (желтый) #FFFF00 (255,255,000)
7-Navy (темно-синий) #000080 (000,000,128)
8-Blue (голубой) #0000FF (000,000,255)
9-Purple (фиолетовый) #800080 (128,000,128)
10-Fuchsia (фуксин) #FF00FF (255,000,255)
11-Teal (серо-зеленый) #008080 (000,128,128)
12-Aqua (морская волна) #00FFFF (000,255,255)
13-Gray (серый) #808080 (128,128,128)
14-Silver (серебряный) #C0C0C0 (192,192,192)
15-White (белый) #FFFFFF (255,255,255)
void OledColorFast (unsigned char colP, unsigned char colF);// установить цвет выводимой точки
Быстрая очистка в черный цвет
void OledClearAll (void);// быстрая очистка в черный цвет
Установка курсора/positioning of the cursor X-(0,95),Y-(0,95)
void OledCursor (char Xp, char Yp);
Закраска прямоугольной области
XS – начало левый нижний угол (0-95)
YS – начало левый нижний угол (0-95)
XE – конец правый верхний угол (0-95)
YE – конец правый верхний угол (0-95)
tip – тир заливки 0-сплошная, 1-градиентная, 2-градиентная серая
NAP – направление градиента (0-7)
colorN – цвет 1 (0-15)
colorS – цвет 2 (0-15)
void OledFillRect (unsigned char XS,unsigned char YS,unsigned char XE,unsigned char YE,unsigned char tip,unsigned char NAP,unsigned char colorN,unsigned char colorS);
Вывод символа//the output symbol
Прорисовка символа
X – 0-132; Y – 0-64
cod – символ
tip – расстояние после символа
sti – тип наложения на фон 0-наложение 1 – стирание фона
shi – ширина 0/1-стандартная 7-максимальная.
vis – высота 0/1-стандартная, 7-максимальная
void OledSymbol (unsigned char cod,unsigned char tip,unsigned char inv,unsigned char shi,unsigned char vis);
Вывод строк/output character strings
OledString – вывод на дисплей строк c любой точки дисплея
str строка символов или указатель на строку в ПЗУ
prop – расстояние между символами
nalo – тип наложения на фон 0-наложение 1 – стирание фона
width-[ширина символа] 0-нормальное до 7
height-[высота символа] 0-нормальное, 1-двойная высота
X-[координата по X][-1 = центрирование строки Х 0-dispX]
Y-[координата по Y][координата Y 0-62]
void OledString(const char *str,char prop,char nalo,char width,char height,char X,char Y);
/*вывод строки с текущей позиции*/
void OledStringCur(const char *str,char prop,char inv,char width,char height);
Бегущая строка/ Ticker
при вызове функции в окно бегущей строки выводиться 1 следующий символ.
в цикле вывода информации должна быть одна строка OledTicker
строка выезжает в окно, пробегает окно, и начинается заново
str – символьная строка – max 255 символов
tipvy – тип вывода информации 0- нормальный, 1- в начале наложение
shiS – ширина символа 0-2 (0,1 == 1)
vysS – высота символа 0-3 (0,1 == 1)
X – положение по X
Y – высота строки (низ)
dlinokna – длина окна в пикселях (ширина будет подогнана к размеру символов)
void OledTicker (const char *str,char tipvy,char shiS,char vysS,char X,char Y,char dlinokna);
Рисование точки
[тип] 0-цвет рисунка,1-цвет фона
[координата по X] 0-127
[координата по Y] 0-63
void point(unsigned char tip, unsigned char X, unsigned char Y);
Рисование линии алгоритм Брезенхема
// tip тип линии 0-цвет рисунка 1-цвет фона, 2-варианты пунктиров
// x0 y0 x1 y1 – координаты линии
void line(unsigned char tip, unsigned char x0, unsigned char y0, unsigned char x1, unsigned char y1);
Рисование прямоугольника (есть ограничение на задание координат – задание координаты верхний левый угол + ширина и высота)
1-[тип углов]0-прямые, 1-скругленные
2-[тип линии] 0-отсутствует 1- сплошная, от 2 и более варианты прорисовки
3-[толщина бордюра] 0- нет (заливка все равно будет делать 1 пиксель отступа), 1,2,3 толщина
4-[тип заливки]0-нет заливки,1-цвет рисунка,2-цвет фона, 3 и более варианты
5-[x0][y0] – координата нижнего левого угла
6-[ширина] – ширина прямоугольника
7-[высота] – высота прямоугольника
void rectangle(unsigned char ugl, unsigned char tip, unsigned char bor, unsigned char tipzal, unsigned char x0, unsigned char y0, unsigned char sh, unsigned char vs);
Полоса загрузки индикатор линейный (есть ограничение на задание координат – задание координата нижнего левый угол + ширина и высота)
[тип углов]0-прямые, 1-скругленные
[тип линии]0-белая 1- сплошная, от 2 и более варианты
[тип заливки]0-белая,1-черная, 2 и более варианты
[x0][y0] – координата нижнего левого угла
[ширина] – ширина прямоугольника
[высота] – высота прямоугольника
[vol] – уровень 0-100%
void strip(unsigned char ugl, unsigned char tip, unsigned char tipzal, unsigned char x0, unsigned char y0, unsigned char sh, unsigned char vs, unsigned char vol);
[box title=”Файлы для загрузки” color=”#521BDE”] Библиотека + демопример v1.0(MPLAB X IDE v1.80, XC16 C Compiler V1.11) [wpdm_file id=199]Схема подключения индикаторов на драйвере SEPS114A[wpdm_file id=194][/box]
Это может быть интересно
 WiFi ESP8266 ESP-202 (ESP-12F)Views: 7677 Первое знакомство, сначала надо его купить… http://voron.ua/catalog/024404 Схема для подключения и тестирования По схеме ставим две кнопки, сброс и кнопку BT2, для перевода в режим обновления прошивки. Если надо сделать …
WiFi ESP8266 ESP-202 (ESP-12F)Views: 7677 Первое знакомство, сначала надо его купить… http://voron.ua/catalog/024404 Схема для подключения и тестирования По схеме ставим две кнопки, сброс и кнопку BT2, для перевода в режим обновления прошивки. Если надо сделать … MPLAB® Harmony – или как это просто! Часть 3.Views: 2081 Часть третья – копнём немного глубже. Вы наверное заметили, что во второй главе, вроде сначала все шло как по маслу, а потом, что бы заморгали светики, я вставил …
MPLAB® Harmony – или как это просто! Часть 3.Views: 2081 Часть третья – копнём немного глубже. Вы наверное заметили, что во второй главе, вроде сначала все шло как по маслу, а потом, что бы заморгали светики, я вставил … Счетчики посетителейViews: 1265 Вас сосчитали!? или счетчики посетителей. Для чего нужны счетчики посетителей? Какие они бывают? ТОРГОВЛЯ. Подсчитайте, сколько ваш магазин посещает человек за день. Кок много человек приходит утром, какое …
Счетчики посетителейViews: 1265 Вас сосчитали!? или счетчики посетителей. Для чего нужны счетчики посетителей? Какие они бывают? ТОРГОВЛЯ. Подсчитайте, сколько ваш магазин посещает человек за день. Кок много человек приходит утром, какое … OLED RET012864E/REX012864JViews: 1462 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как …
OLED RET012864E/REX012864JViews: 1462 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как … Регулятор влажностиViews: 1382 Регулятор ILLISSI-CH-1000 предназначен для контроля и регулировки относительной влажности в диапазоне от 0 до 100%. Регулятор позволяет работать как в режиме осушения, так и увлажнения. Для измерения возможно …
Регулятор влажностиViews: 1382 Регулятор ILLISSI-CH-1000 предназначен для контроля и регулировки относительной влажности в диапазоне от 0 до 100%. Регулятор позволяет работать как в режиме осушения, так и увлажнения. Для измерения возможно … LED драйвер TM1639Views: 2183 TМ1639 позволяет работать на матрицу 8*8 или 8 семисегметных индикаторов. Может работать как на индикаторы с общим катодом, но и есть возможность подключать общим анодом. Для управления драйвером …
LED драйвер TM1639Views: 2183 TМ1639 позволяет работать на матрицу 8*8 или 8 семисегметных индикаторов. Может работать как на индикаторы с общим катодом, но и есть возможность подключать общим анодом. Для управления драйвером … Проект с использованием MCC часть 12-2Views: 1031 Настало время для изучения шины I2C. Изучать будем на примере работы с индикатором RET012864E. Что изменили со старой схемы: В прошлой теме я затупил и не добавил подтягивающие резисторы …
Проект с использованием MCC часть 12-2Views: 1031 Настало время для изучения шины I2C. Изучать будем на примере работы с индикатором RET012864E. Что изменили со старой схемы: В прошлой теме я затупил и не добавил подтягивающие резисторы … APA102 – светодиоды со встроенным драйвером и SPI интерфейсомViews: 3264 APA102 В 2014 году фирма Shenzhen Led Color Optoelectronic Co., Ltd http://www.szledcolor.com/ начала производство светодиодов на драйвере APA102. Это серия так называемых светодиодов со встроенным драйвером. Основной особенностью этих …
APA102 – светодиоды со встроенным драйвером и SPI интерфейсомViews: 3264 APA102 В 2014 году фирма Shenzhen Led Color Optoelectronic Co., Ltd http://www.szledcolor.com/ начала производство светодиодов на драйвере APA102. Это серия так называемых светодиодов со встроенным драйвером. Основной особенностью этих … TDA7294 part 1Views: 237 TDA7294 має унікальні дані для створення підсилювачів звукової частоти HI-FI класу. Варіант застосування є конфігурація BRIDGE (мостова схема включення), де використовуються два TDA7294, як показано на схематичній діаграмі …
TDA7294 part 1Views: 237 TDA7294 має унікальні дані для створення підсилювачів звукової частоти HI-FI класу. Варіант застосування є конфігурація BRIDGE (мостова схема включення), де використовуються два TDA7294, як показано на схематичній діаграмі … Система отопления на солнечных коллекторах от Дмитрия (rv3dpi)Views: 3192 Солнечные коллекторы для отопления в Европе используют в более 50% от общего количества установленных гелиосистем. Однако следует понимать, что гелиосистемы предназначены лишь для поддержки отопления и экономии затрат на основную …
Система отопления на солнечных коллекторах от Дмитрия (rv3dpi)Views: 3192 Солнечные коллекторы для отопления в Европе используют в более 50% от общего количества установленных гелиосистем. Однако следует понимать, что гелиосистемы предназначены лишь для поддержки отопления и экономии затрат на основную …