Views: 757
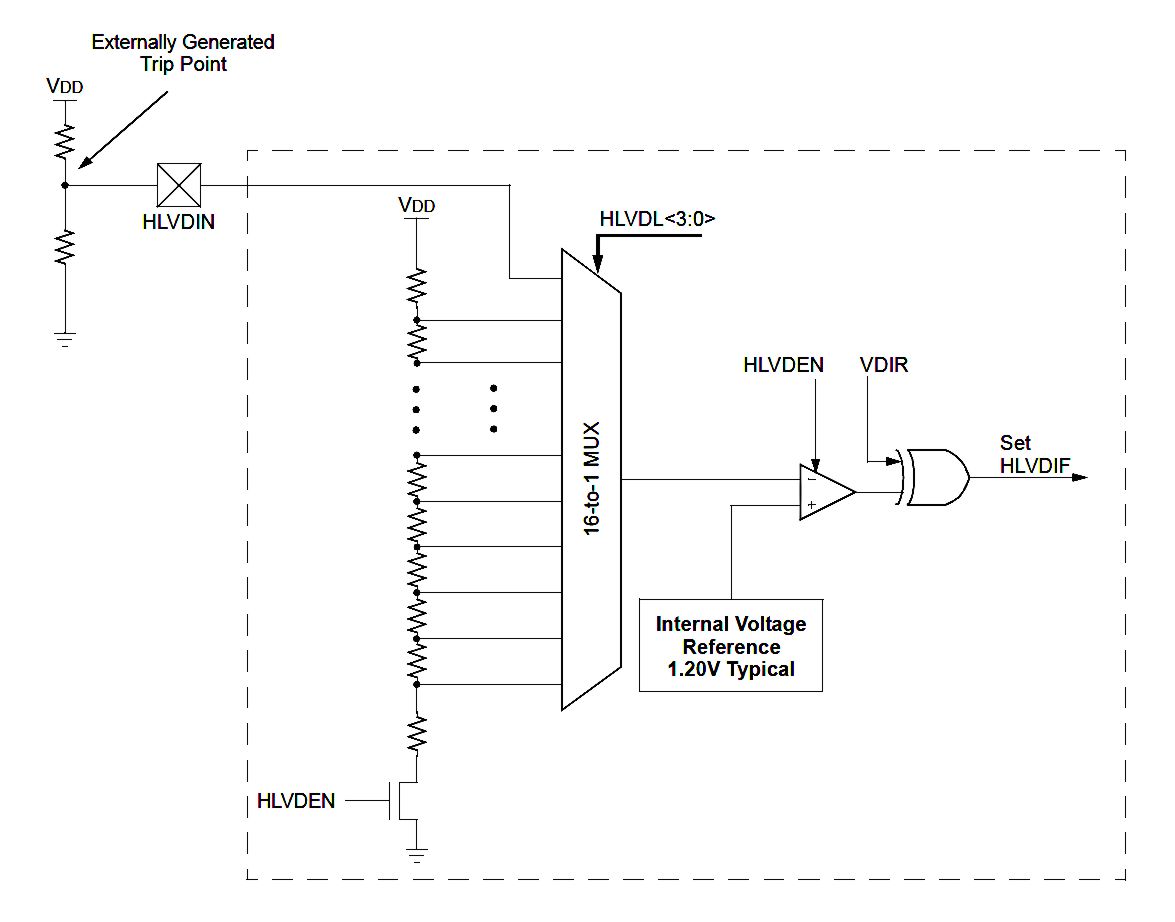
HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что необходимо выполнить соответствующие действия. Часто этот модуль необходим, чтобы выполнить обработку аварийных ситуаций при пропадании напряжения питания.
В микроконтроллере PIC24FJ128GA204 есть возможность получения аналогового сигнала с внешнего делителя, но есть микроконтроллеры, в котором этот вход отсутствует, и возможен контроль только самого напряжения питания микроконтроллера. Внешний вход позволяет значительно расширить контроль напряжения питания, можно вывести контроль на входное напряжение до стабилизатора и на раннем этапе обнаружить понижение напряжения и раньше начать выполнять процедуру остановки системы.
Модуль имеет один регистр управления HLVDCON. Назначение бит следующее:
| HLVDCON: HIGH/LOW-VOLTAGE DETECT CONTROL REGISTER | |||||||
| R/W-0 | U-0 | R/W-0 | U-0 | U-0 | U-0 | U-0 | U-0 |
| HLVDEN | LSIDL | ||||||
| bit 15 | bit 14 | bit 13 | bit 12 | bit 11 | bit 10 | bit 9 | bit 8 |
| R/W-0 | R/W-0 | R/W-0 | U-0 | R/W-0 | R/W-0 | R/W-0 | R/W-0 |
| VDIR | BGVST | IRVST | HLVDL3 | HLVDL2 | HLVDL1 | HLVDL0 | |
| bit 7 | bit 6 | bit 5 | bit 4 | bit 3 | bit 2 | bit 1 | bit 0 |
bit 15 HLVDEN: бит включения питания модуля
1 = HLVD включен
0 = HLVD отключен
bit 14 Не реализовано: чтение дает ‘0’
bit 13 LIDL: бит работы модуля в режиме ожидания
1 = модуль отключен, когда устройство переходит в режим ожидания
0 = модуль продолжит работу в режиме ожидания
bit 12-8 Не реализовано: чтение дает ‘0’
bit 7 VDIR: Выбор направления изменения напряжения для формирования события
1 = Событие возникает, когда напряжение равно или превышает точку отключения (HLVDL <3: 0>)
0 = Событие возникает, когда напряжение равно или падает ниже точки отключения (HLVDL <3: 0>)
bit 6 BGVST: бит флага стабильности напряжения запрещенной зоны
1 = Указывает, что напряжение запрещенной зоны является стабильным
0 = Указывает, что напряжение запрещенной зоны является неустойчивым
bit 5 IRVST: бит флага стабильности внутренего источника опорного напряжения
1 = Внутреннее опорное напряжение является стабильным; логика High-Voltage Detect генерирует флаг прерывания на
заданный диапазон напряжения
0 = Внутреннее опорное напряжение неустойчиво; логика обнаружения высокого напряжения не приведет к прерыванию флаг в указанном диапазоне напряжений и прерывание HLVD не должно быть включено
bit 4 Не реализовано: чтение дает ‘0’
bit 3-0 HLVDL <3: 0>: бит ограничения обнаружения высокого / низкого напряжения
1111 = используется внешний аналоговый вход (вход поступает от выводов HLVDIN)
1110 = Точка отключения 1 (1)
1101 = точка отключения 2 (1)
*
*
*
1100 = точка срабатывания 3 (1)
0100 = Точка отключения 11 (1)
00xx = состояние не используется
| HIGH/LOW-VOLTAGE DETECT CHARACTERISTICS | ||||||
| Symbol | Characteristic | Min | Typ | Max | Units | |
| VHLVD | HLVD Voltage on VDD Transition |
HLVDL<3:0> = 0100 | 3.45 | 3.59 | 3.74 | V |
| HLVDL<3:0> = 0101 | 3.33 | 3.45 | 3.58 | V | ||
| HLVDL<3:0> = 0110 | 3.0 | 3.125 | 3.25 | V | ||
| HLVDL<3:0> = 0111 | 2.8 | 2.92 | 3.04 | V | ||
| HLVDL<3:0> = 1000 | 2.7 | 2.81 | 2.93 | V | ||
| HLVDL<3:0> = 1001 | 2.50 | 2.6 | 2.70 | V | ||
| HLVDL<3:0> = 1010 | 2.40 | 2.52 | 2.64 | V | ||
| HLVDL<3:0> = 1011 | 2.30 | 2.40 | 2.50 | V | ||
| HLVDL<3:0> = 1100 | 2.20 | 2.29 | 2.39 | V | ||
| HLVDL<3:0> = 1101 | 2.10 | 2.19 | 2.28 | V | ||
| HLVDL<3:0> = 1110 | 2.00 | 2.08 | 2.17 | V | ||
| VTHL | HLVD Voltage on HLVDIN Pin Transition |
HLVDL<3:0> = 1111 | – | 1.2 | – | V |
Настройка модуля для работы с внешним напряжение, для контроля понижение ниже порога в MCC, выглядит таким образом:
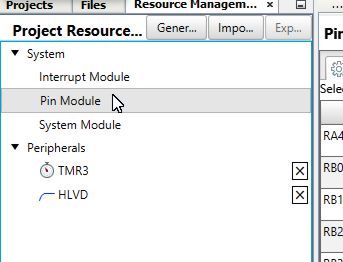
Добавим модуль в ресурсы проекта
Выполним настройку:

Включим модуль (Enable HLVD), активируем прерывания от модуля, в последствии в прерывания включим процедуру, в которой будет необходимо выполнить требуемые операции при пропадании напряжения питания. Выберем внешний вход HLVD для контроля напряжения.
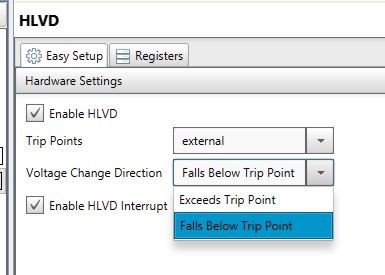
Настроим логику работы прерывания (Voltage Change Direction) Выбор направления изменения напряжения для формирования события:
Exceeds Trip Point – Событие возникает, когда напряжение равно или превышает точку отключения.
Falls Below Trip Point – Событие возникает, когда напряжение равно или падает ниже точки отключения.
Нас интересует вариант когда напряжение упадет ниже значения на входе 1,2 вольта (та как мы используем контроль по внешнему входу). Для контроля более высокого порога нам необходимо применить делитель на резисторах.
Например, нам надо контролировать порог 25 вольт. В качестве резистора “на землю” выберем 10 кОм, рассчитаем “верхний” резистор. Вспоминаем закон Ома.
На резисторе 10 кОм мы должны получить напряжение 1,2 вольта когда входное 25 вольт. Находим ток в цепи:
I= U/R = 1.2 V /10000 Ohm = 0.00012 A.
Падение напряжение на вернем резисторе:
Vv = Vin – 1.2 V = 25 – 1.2 = 23.8 V.
Зная ток в цепи и напряжение на резисторе найдем его сопротивление:
R = U/I = 23.8 V / 0.00012 A = 198333 Ohm.
Это приблизительно 200 kOhm.
Выполним обратный расчет, при напряжении 25 вольт на выходе делителя мы будем иметь 1.1904761904762 вольта. Но учитывая возможную погрешность на применяемом делителе, это все, вполне приемлемо.
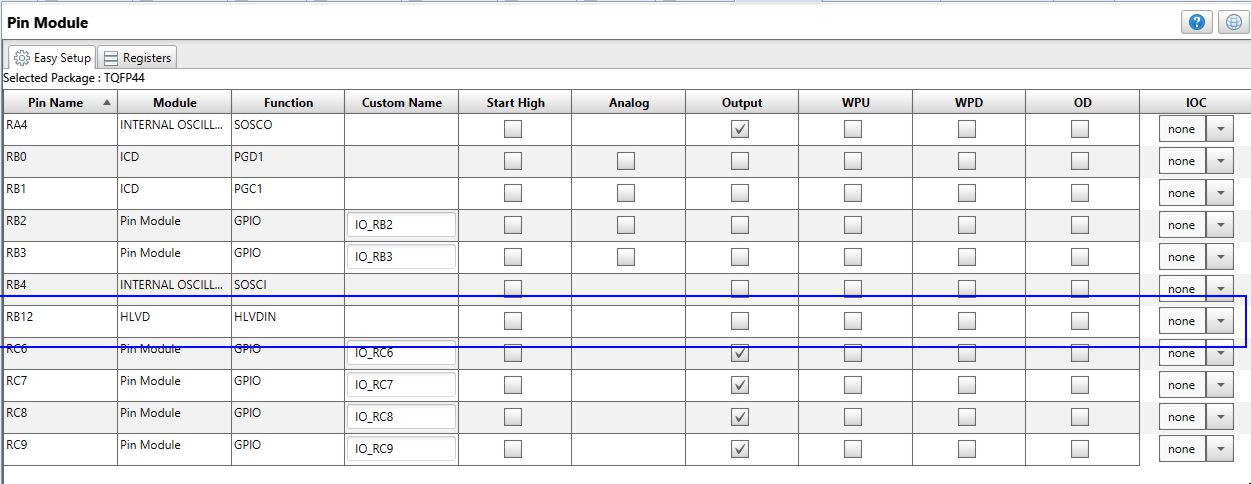
Проверим настройку входа для HLVD модуля:

Выберем Pin Module
и проверим настройку входа
Запустим генерацию файлов в MCC

По окончанию генерации MCC предоставит нам несколько функций:
void HLVD_Initialize (void) – инициализация и настройка модуля под наши параметры, это функция будут включена в процедуру запуска микроконтроллера. Это мы можем убедиться просмотрев функцию void SYSTEM_Initialize (void) в файле systems.c
void SYSTEM_Initialize(void)
{
PIN_MANAGER_Initialize();
CLOCK_Initialize();
INTERRUPT_Initialize();
HLVD_Initialize();
TMR3_Initialize();
}
bool HLVD_IsReferenceVoltageStable(void) – возвращает состояние стабильно или не стабильно опорное напряжение.
bool HLVD_IsBandGapVoltageStable(void) – возвращает состояние стабильно ли контролируемое напряжение.
void HLVD_Enable(void) – предоставляет возможность пользователю включать модуль в процессе работы программы.
void HLVD_Disable(void) – отключать модуль.
void HLVD_TripPointSetup(HLVD_TRIP_DIRECTION direction, HLVD_TRIP_POINTS trip_points) – изменять настройки контроля напряжения.
и сама функция выполнения прерывания от события:
void __attribute__ (( interrupt, no_auto_psv )) _ISR _LVDInterrupt( void )
{
if(IFS4bits.HLVDIF)
{
/* TODO : Add interrupt handling code */
IFS4bits.HLVDIF = 0;
}
}
В нее надо встроить нашу функцию, которая будет обязана выполнить наши задания, если напряжение питания становиться ниже нормы.
Это может быть интересно
 Дисплей KD035C-3A подключение и управлениеViews: 799 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение …
Дисплей KD035C-3A подключение и управлениеViews: 799 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение … Altium Designer my setup system and project structureViews: 898 Используйте только последнее обновление!!! Updates https://catcatcat.d-lan.dp.ua/altium-designer-my-libraries-project-templates-system-settings-by-catcatcat-v23-09/ Тут хочу поделиться как я настраиваю Altium Designer и как я использую файлы DXPPreferences.DXPPrf для быстрой конфигурации и получения …
Altium Designer my setup system and project structureViews: 898 Используйте только последнее обновление!!! Updates https://catcatcat.d-lan.dp.ua/altium-designer-my-libraries-project-templates-system-settings-by-catcatcat-v23-09/ Тут хочу поделиться как я настраиваю Altium Designer и как я использую файлы DXPPreferences.DXPPrf для быстрой конфигурации и получения … Часы + Календарь + Термометр + …Views: 2765 Часы + Календарь + Термометр + Индикатор влажности + Секундомер + Дистанционное управление на ИК лучах (пульты на RC-5 протоколе) + Автоматическая регулировка яркости + Возможность вывода данных через USB, …
Часы + Календарь + Термометр + …Views: 2765 Часы + Календарь + Термометр + Индикатор влажности + Секундомер + Дистанционное управление на ИК лучах (пульты на RC-5 протоколе) + Автоматическая регулировка яркости + Возможность вывода данных через USB, … Самый простой диммер для светодиодного освещенияViews: 3156 Светодиоды все больше входят в нашу жизнь как источники освещения и как само собой разумеющееся, это вопрос регулировки яркости. Существует множество схемных решений, но в нашем варианте мы …
Самый простой диммер для светодиодного освещенияViews: 3156 Светодиоды все больше входят в нашу жизнь как источники освещения и как само собой разумеющееся, это вопрос регулировки яркости. Существует множество схемных решений, но в нашем варианте мы … Регулятор влажности ch-3800Views: 1530 И еще один проект на плате ch-c3xxx – универсальный регулятор влажности ch-3800. Регулятор позволяет работать как в режиме индикатора влажности, так и в режиме регулятора. Рабочий диапазон …
Регулятор влажности ch-3800Views: 1530 И еще один проект на плате ch-c3xxx – универсальный регулятор влажности ch-3800. Регулятор позволяет работать как в режиме индикатора влажности, так и в режиме регулятора. Рабочий диапазон … Простой цифровой вольтметр ch-c3200Views: 2578 В этой статье рассмотрен пример создания простого вольтметра постоянного тока на основе печатной платы ch-c0030pcb, а при возможности использования внешнего делителя и вольтметр переменного тока. Дан краткий принцип …
Простой цифровой вольтметр ch-c3200Views: 2578 В этой статье рассмотрен пример создания простого вольтметра постоянного тока на основе печатной платы ch-c0030pcb, а при возможности использования внешнего делителя и вольтметр переменного тока. Дан краткий принцип … Датчик контроля протечки воды ch-c0020Views: 2048 Как здорово летом под теплым дождем с тобою вдвоем оказаться. Как классно по лужам бежать босиком, с тобою играть и смеяться! Но совсем грустно оказаться под таким дождем, который течет с …
Датчик контроля протечки воды ch-c0020Views: 2048 Как здорово летом под теплым дождем с тобою вдвоем оказаться. Как классно по лужам бежать босиком, с тобою играть и смеяться! Но совсем грустно оказаться под таким дождем, который течет с … NeoPixel LED и PIC18Views: 1831 Еще раз об управлении светодиодами на драйвере WS2812 и ему подобных. Как известно эти светики управляются по однопроводной шине. Основная особенность, что программно можно описать передачу данных, …
NeoPixel LED и PIC18Views: 1831 Еще раз об управлении светодиодами на драйвере WS2812 и ему подобных. Как известно эти светики управляются по однопроводной шине. Основная особенность, что программно можно описать передачу данных, … LATINO – открытый проект ch-светомузыкиViews: 1697 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была …
LATINO – открытый проект ch-светомузыкиViews: 1697 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была … MPLAB® Harmony – или как это просто! Часть 4.Views: 2295 Часть четвертая – это может показаться немного сложно. Структура проекта. Для облегчения конфигурирования проекты MPLAB Harmony обычно структурированы таким образом, чтобы изолировать код, необходимый для настройки «системы», от …
MPLAB® Harmony – или как это просто! Часть 4.Views: 2295 Часть четвертая – это может показаться немного сложно. Структура проекта. Для облегчения конфигурирования проекты MPLAB Harmony обычно структурированы таким образом, чтобы изолировать код, необходимый для настройки «системы», от …