Views: 1400
Измерение частоты классически можно выполнить двумя способами.
Способ первый.
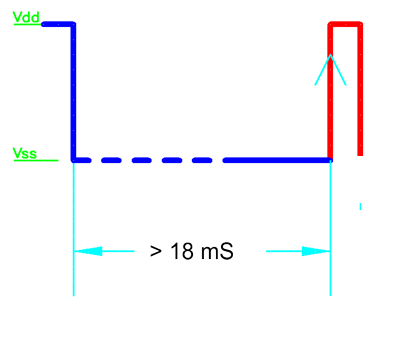
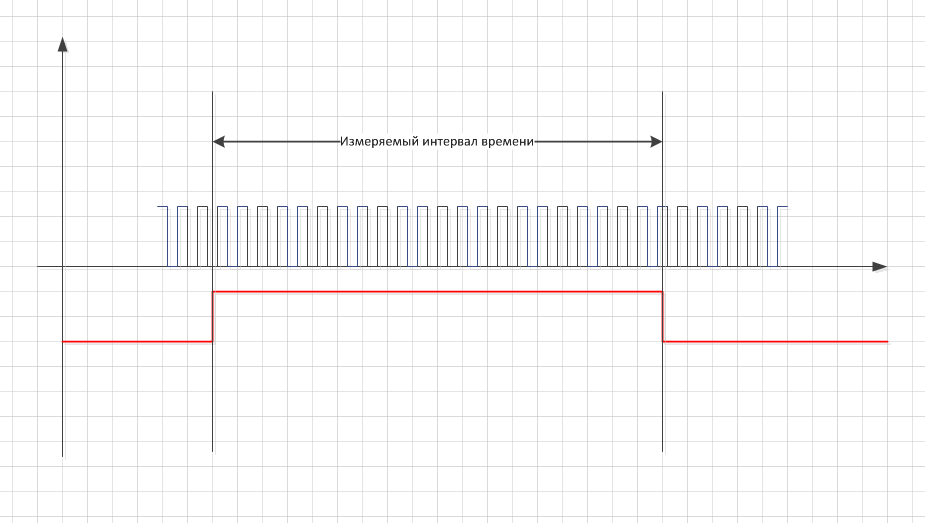
Необходимо за фиксированный промежуток времени подсчитать количество периодов измеряемой частоты. После этого необходимо количество импульсов разделить на время измерения. Точность измерения зависит от длительности измеряемого промежутка времени. Чем длиннее промежуток, тем точнее можно выполнить изменения.
Второй способ.
Это измерять длительность одного периода и вычислитель частоту. Точность измерения зависит от частоты тактовых импульсов, чем выше и стабильней частота тактовых импульсов тем выше разрешение и точнее измерения.
К каждом методе есть свои плюсы и свои минусы. Если необходимо высокая точно в первом это длительность измерения, если надо быстро измерять, то необходимо высокая тактовая частота.
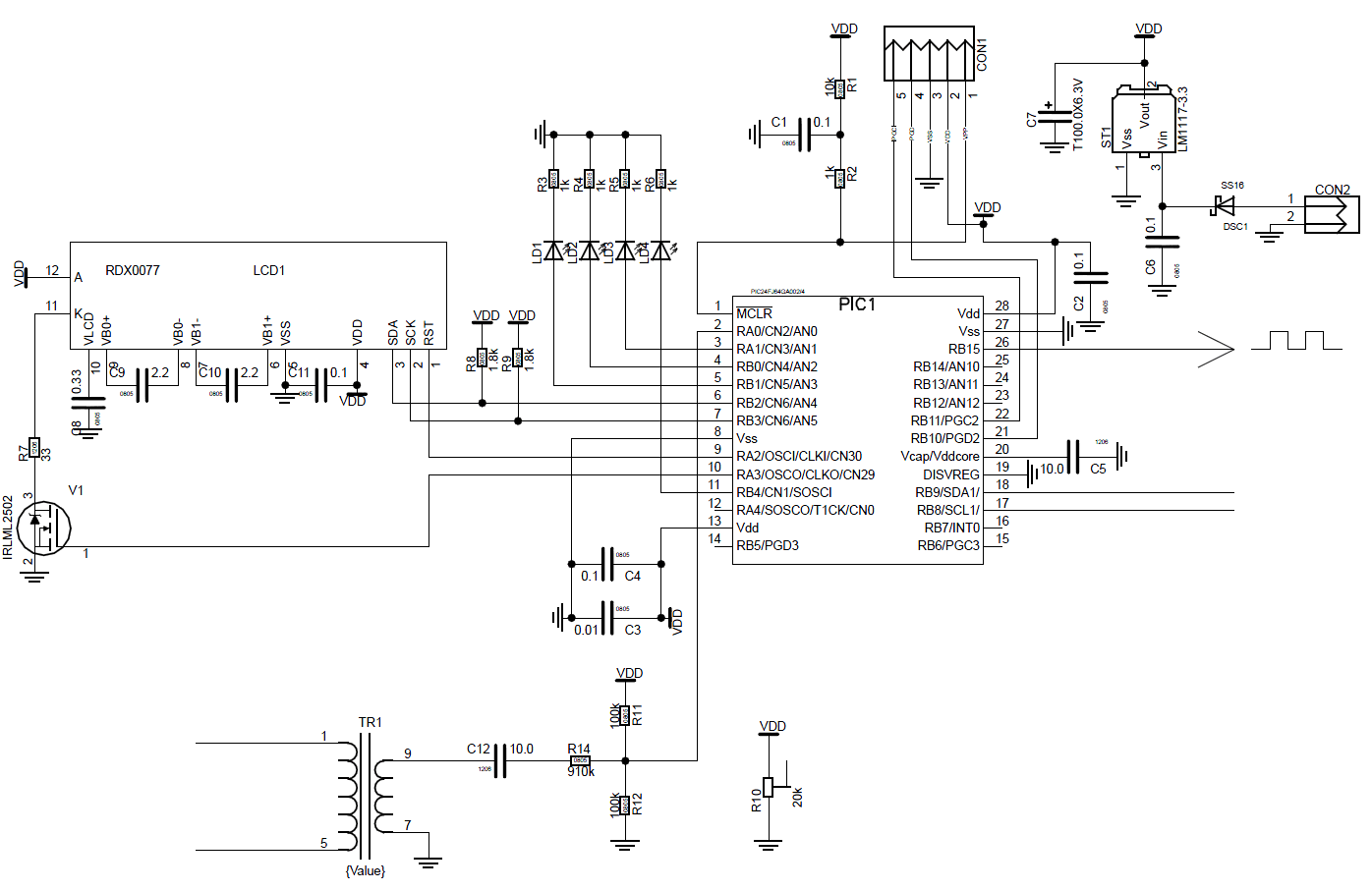
Для измерения частоты (в нашем варианте частоты электросети), модифицируем нашу схему следующим образом.
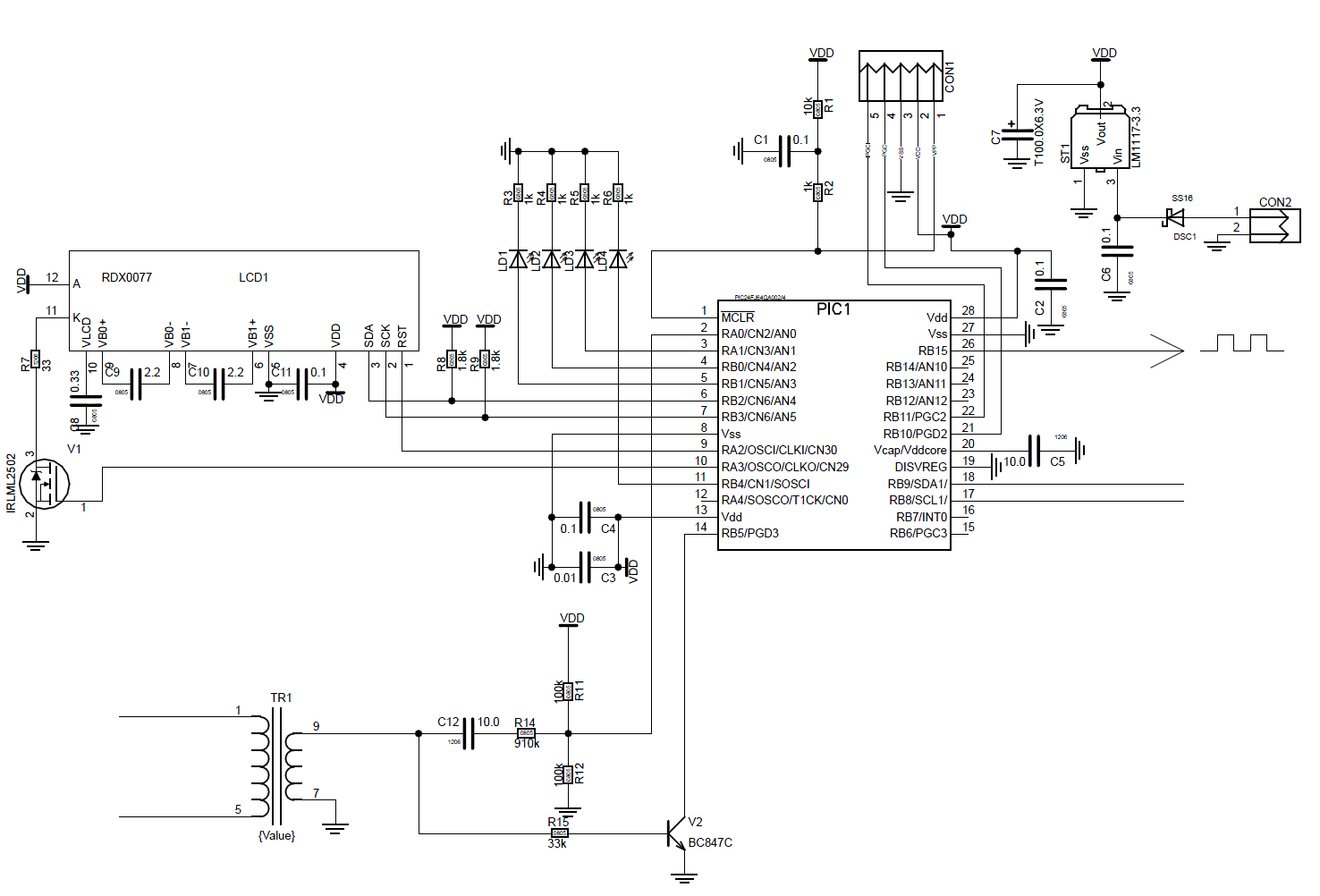
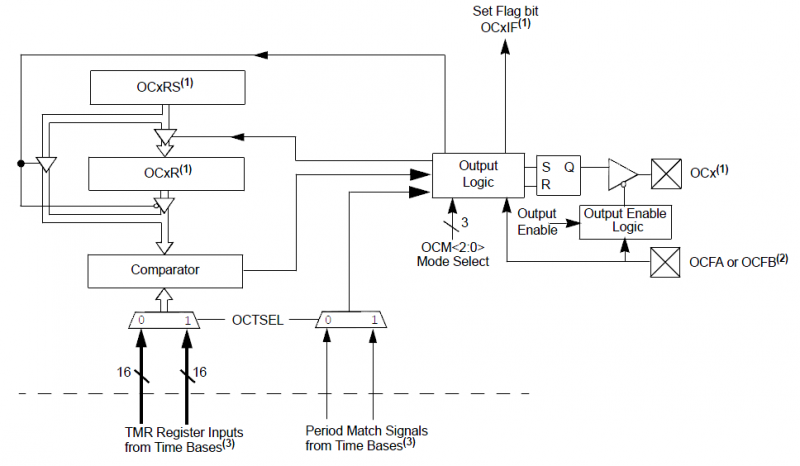
Все эти измерения можно выполнить при помощи встроенного таймера. Так-как у нас таймер 1 и 2 занят формированием временных интервалом. Поэтому будем для измерения частоты использовать сборку на таймерах TMR4 и TMR5. Для входа сигнала будем использовать Т4СК.
Так как периферийные модули по умолчанию “никуда не подключен”, то первым делом необходимо настроить регистры конфигурации выбора периферийного модуля. Нам надо определиться к какой ножке микроконтроллера мы подключим его вход. У нас свободна 14 нога. Это функция RP5. Для подключения входа T4CK к ноге 14 на необходимо в регистра настройки входа RPINR4 загрузить значение 5.
Для настройки входа таймера обратимся к регистрам управления входами периферийных устройств.
| Название входа | Имя периферийного модуля | Регистр | Биты конфигурации |
| External Interrupt 1 | INT1 | RPINR0 | INTR1<4:0> |
| External Interrupt 2 | INT2 | RPINR1 | INTR2R<4:0> |
| Timer2 External Clock | T2CK | RPINR3 | T2CKR<4:0> |
| Timer3 External Clock | T3CK | RPINR3 | T3CKR<4:0> |
| Timer4 External Clock | T4CK | RPINR4 | T4CKR<4:0> |
| Timer5 External Clock | T5CK | RPINR4 | T5CKR<4:0> |
| Input Capture 1 | IC1 | RPINR7 | IC1R<4:0> |
| Input Capture 2 | IC2 | RPINR7 | IC2R<4:0> |
| Input Capture 3 | IC3 | RPINR8 | IC3R<4:0> |
| Input Capture 4 | IC4 | RPINR8 | IC4R<4:0> |
| Input Capture 5 | IC5 | RPINR9 | IC5R<4:0> |
| Output Compare Fault A | OCFA | RPINR11 | OCFAR<4:0> |
| Output Compare Fault B | OCFB | RPINR11 | OCFBR<4:0> |
| UART1 Receive | U1RX | RPINR18 | U1RXR<4:0> |
| UART1 Clear To Send | U1CTS | RPINR18 | U1CTSR<4:0> |
| UART2 Receive | U2RX | RPINR19 | U2RXR<4:0> |
| UART2 Clear To Send | U2CTS | RPINR19 | U2CTSR<4:0> |
| SPI1 Data Input | SDI1 | RPINR20 | SDI1R<4:0> |
| SPI1 Clock Input | SCK1IN | RPINR20 | SCK1R<4:0> |
| SPI1 Slave Select Input | SS1IN | RPINR21 | SS1R<4:0> |
| SPI2 Data Input | SDI2 | RPINR22 | SDI2R<4:0> |
| SPI2 Clock Input | SCK2IN | RPINR22 | SCK2R<4:0> |
| SPI2 Slave Select Input | SS2IN | RPINR23 | SS2R<4:0> |
Функции ввода
| Функция | Номер ножки | Код для записи в регистр |
| RP0 | 4 | 0 |
| RP1 | 5 | 1 |
| RP2 | 6 | 2 |
| RP3 | 7 | 3 |
| RP4 | 11 | 4 |
| RP5 | 14 | 5 |
| RP6 | 15 | 6 |
| RP7 | 16 | 7 |
| RP8 | 17 | 8 |
| RP9 | 18 | 9 |
| RP10 | 21 | 10 |
| RP11 | 22 | 11 |
| RP12 | 23 | 12 |
| RP13 | 24 | 13 |
| RP14 | 25 | 14 |
| RP15 | 26 | 15 |
Настройка входа таймера:
RPINR4bits.T4CKR=5; // настройка входа таймера 4 на вывод 14 микроконтроллера (RP5) TRISB = 0b0000000000100000; // разряды порта B на выход, кроме RB5
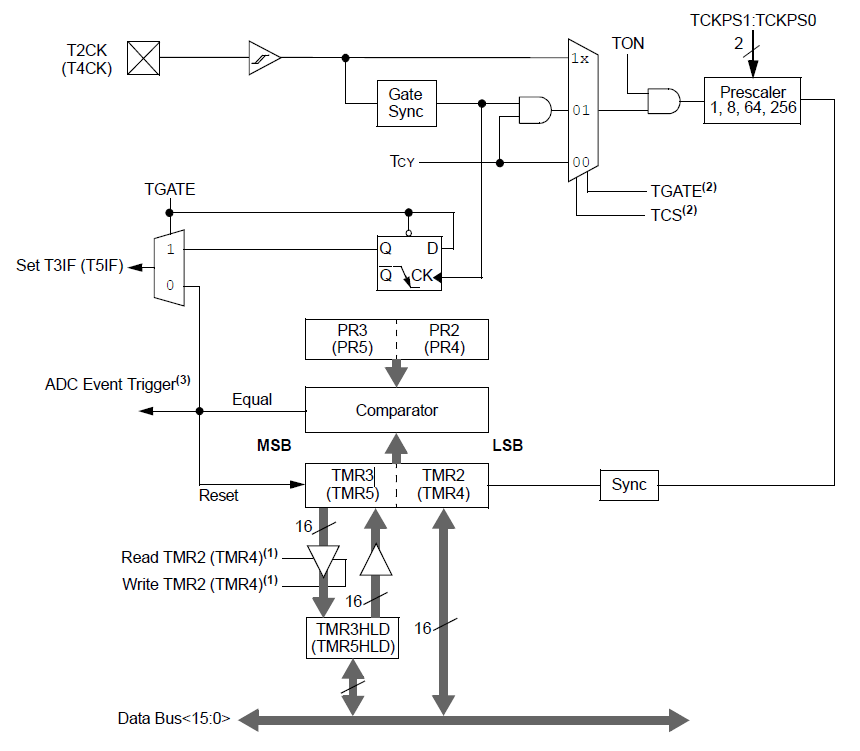
Конфигурирование таймеров: (будем настраивать для 32 битного режима):
Чтобы настроить Timer2/3 или Timer4/5 для 32-разрядной работы необходимо:
1. Установить T32 бит (T2CON <3> или T4CON <3> = 1).
2. Настроить предделителя для Timer2 или Timer4 битами TCKPS1: TCKPS0.
3. Настроить вход для тактовых импульсов и режимов работы с помощью TCS и TGATE бит. Если TCS установлен для внешней синхронизации, RPINRx (TxCK) должны быть настроены на доступные RPn вход.
4. Настроить период работы таймера загрузив регистр PR. PR3 (или PR5) будет содержат старшее слово, в то время как PR2 (или PR4) содержать младшие слово.
5. Если требуется прерывания, установить биты в регистрах T3IE или T5IE; использовать приоритет бит, T3IP2: T3IP0 или T5IP2: T5IP0, чтобы установить прерывание приоритет. Обратите внимание, что в то время как Timer2 или Timer4 управления таймера, прерывания появляется как Timer3 или Timer5 прерывания.
6. Установить TON бит (= 1).
//--------------------------------------------------------------------------- // настройка тамера TMR4 T4CON=0b1010000000001010; // |||||||||||||||+-- неиспользуемый // ||||||||||||||+--- TCS: 1 - внешний источник // |||||||||||||+---- неиспользуемый // ||||||||||||+----- T32: 0- 32 битный режим // ||||||||||++------ TCKPS1:TCKPS0: пределитель 00-1:1 // |||||||||+-------- TGATE: - отключен // |||++++++--------- неиспользуемые // ||+--------------- TSIDL: 1- врежиме Idle отключен // |+---------------- неиспользуемый // +----------------- TON: 1 - таймер включен PR2=0xFFFF; // период счета //---------------------------------------------------------------------------
Для работы нашей схемы нам необходимо на 14 ножку контроллера подключить подтягивающий резистор. За активацию подтягивающих резисторов отвечают регистры CNPU1 и CNPU2. Для нашего контроллера соответствие с выводами контроллера следующее:
| Регистр | Управляющий бит | Вывод контроллера |
| CNPU1 | CN0PUE | 12 |
| CNPU1 | CN1PUE | 11 |
| CNPU1 | CN2PUE | 2 |
| CNPU1 | CN2PUE | 3 |
| CNPU1 | CN3PUE | 4 |
| CNPU1 | CN4PUE | 5 |
| CNPU1 | CN5PUE | 6 |
| CNPU1 | CN6PUE | 7 |
| CNPU1 | CN7PUE | |
| CNPU1 | CN8PUE | |
| CNPU1 | CN9PUE | |
| CNPU1 | CN10PUE | |
| CNPU1 | CN11PUE | 26 |
| CNPU1 | CN12PUE | 25 |
| CNPU1 | CN13PUE | 24 |
| CNPU1 | CN14PUE | 23 |
| CNPU1 | CN15PUE | 22 |
| CNPU2 | CN16PUE | 21 |
| CNPU2 | CN17PUE | |
| CNPU2 | CN18PUE | |
| CNPU2 | CN19PUE | |
| CNPU2 | CN20PUE | |
| CNPU2 | CN21PUE | 18 |
| CNPU2 | CN22PUE | 17 |
| CNPU2 | CN23PUE | 16 |
| CNPU2 | CN24PUE | 15 |
| CNPU2 | CN25PUE | |
| CNPU2 | CN26PUE | |
| CNPU2 | CN27PUE | 14 |
| CNPU2 | CN28PUE | |
| CNPU2 | CN29PUE | 10 |
| CNPU2 | CN30PUE | 9 |
Для подключение подтягивающего резистора к ножке 14 , необходимо выполнить команду
CNPU2bits.CN27PUE=1; // подключить к 14 ножке подтягивающий резистор
Так как в нашем примере, мы используем внутренний тактовый генератор, то измерения соответственно будет менее точные если бы мы использовали кварцевую стабилизацию частоты. Для корректировки длительности, будем использовать регистр PR1.
Для измерения частоты, добавить в цикл прерывания от таймера Т1 две команды:
// измерение частоты
chastota=TMR4;
TMR4=0;
т.е. таймер Т1 формирует заданный нами интервал времени, по прерыванию таймера , мы считываемым значение таймера Т4, а затем обнуляем его.
Для индикации в главном цикле программы добавим
curcorG_LCD (30,0);
bin_dec(chastota ,0,0,0);
Stringp_LCD (" герц",0,1,1);
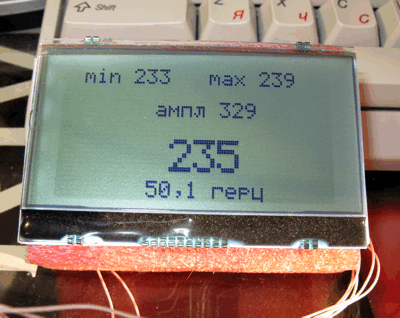
теперь внизу дисплея мы увидим измеряемую частоту в герцах. Если период измерения 1 секунда, то измерять будем с точностью до 1 Герца, для увеличение точности до 0,1 Герца или 0,01 герца, нам надо соответственно увеличить время измерения.
Фото для первого варианта, когда период измерения равен 1 секунде.

Но для контроля качества частоты в сети нам необходимо более высокая точность, поэтому увеличим период измерения до 10 секунд. Для это нам необходимо добавить делитель, программный, чтобы увеличить время измерения до 10 секунд.
// измерение частоты
if(++chetgerc>9)
{
chetgerc=0;
chastota=TMR4;
TMR4=0;
}
а для красоты, индикации десятых долей, включит индикацию запятой перед младшим разрядом.
curcorG_LCD (30,0);
bin_dec(chastota ,1,0,0);
Stringp_LCD (" герц",0,1,1);
 10 секунд на измерение это уже много. А если необходимо измерять частоту с точностью до 0,01 Герца, так это надо ждать 100 СЕКУНД!!!, а эффект усреднения который может за это время внести свои погрешности. Вообще сделаем вывод, для оперативного контроля частоты электросети такой метод не эффективен. Хотя при написании этого урока, наблюдая за частотой сети, она колебалась от 50,04 – 50,31 Герца (в режиме измерения 100 секунд).
10 секунд на измерение это уже много. А если необходимо измерять частоту с точностью до 0,01 Герца, так это надо ждать 100 СЕКУНД!!!, а эффект усреднения который может за это время внести свои погрешности. Вообще сделаем вывод, для оперативного контроля частоты электросети такой метод не эффективен. Хотя при написании этого урока, наблюдая за частотой сети, она колебалась от 50,04 – 50,31 Герца (в режиме измерения 100 секунд).
Испробуем второй метод измерения длительности периода (или импульса). Благо, что сам модуль микроконтроллера позволяет это делать.
продолжение следует…
Это может быть интересно
 PIC18F25K42 – v. A001 – выявленные баги.Views: 604 Модуль I2C Не работает при использовании в стандартной конфигурации MCC. Требует особой нестандартной конфигурации и управления для нормальной работы. Обойти Обход проблемы возможен библиотека см статью. Модуль ADC2 На …
PIC18F25K42 – v. A001 – выявленные баги.Views: 604 Модуль I2C Не работает при использовании в стандартной конфигурации MCC. Требует особой нестандартной конфигурации и управления для нормальной работы. Обойти Обход проблемы возможен библиотека см статью. Модуль ADC2 На … Ссылки на интересные источникиViews: 839 Сбор 3D моделей от André L’Hérault конденсаторы, резисторы, индуктивности dropbox IPC-SM-782 Surface Mount Design and Land Pattern Standard Видео уроки по Altium designer Alexey Sabunin https://www.youtube.com/channel/UCG7N5CqXpyK8nQjr1EmMgng Сергей Булавинов https://www.youtube.com/channel/UCISAMXRnN_Qw9UTjUwZI1Jw Robert Feranec https://www.youtube.com/user/matarofe …
Ссылки на интересные источникиViews: 839 Сбор 3D моделей от André L’Hérault конденсаторы, резисторы, индуктивности dropbox IPC-SM-782 Surface Mount Design and Land Pattern Standard Видео уроки по Altium designer Alexey Sabunin https://www.youtube.com/channel/UCG7N5CqXpyK8nQjr1EmMgng Сергей Булавинов https://www.youtube.com/channel/UCISAMXRnN_Qw9UTjUwZI1Jw Robert Feranec https://www.youtube.com/user/matarofe … Обновление ESP8266 c ESPFlashDownloadTool_v3.6.3Views: 3461 Технология обновления следующая: Загружаем программу со страницы espressif.com. Разархивируем. Где находятся файлы, для прошивки? Заходим в каталоги Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка). Запускаем программу, …
Обновление ESP8266 c ESPFlashDownloadTool_v3.6.3Views: 3461 Технология обновления следующая: Загружаем программу со страницы espressif.com. Разархивируем. Где находятся файлы, для прошивки? Заходим в каталоги Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка). Запускаем программу, … Бегущие огни (ch-bo-36)Views: 2426 Проект на PIC-микроконтроллере PIC16F648A. Количество каналов 36. Для индикации используется подключение по матрице 6х6. Расположение светодиодов в одну линию. Все эффекты написаны для возможности увеличения количества светодиодов. Рекомендуется …
Бегущие огни (ch-bo-36)Views: 2426 Проект на PIC-микроконтроллере PIC16F648A. Количество каналов 36. Для индикации используется подключение по матрице 6х6. Расположение светодиодов в одну линию. Все эффекты написаны для возможности увеличения количества светодиодов. Рекомендуется … Цифровой тахометр для автомобиля CH-С3300Views: 1894 Тахометр Ch-С3300 предназначен для индикации и контроля оборотов, времени работы и максимальных оборотов развиваемых двигателем во время поездки. Датчиком может использоваться как обычный контактный прерыватель или выход датчика …
Цифровой тахометр для автомобиля CH-С3300Views: 1894 Тахометр Ch-С3300 предназначен для индикации и контроля оборотов, времени работы и максимальных оборотов развиваемых двигателем во время поездки. Датчиком может использоваться как обычный контактный прерыватель или выход датчика … The art of DJViews: 96 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is …
The art of DJViews: 96 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is … AD9833 – Programmable Waveform GeneratorViews: 2820 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить …
AD9833 – Programmable Waveform GeneratorViews: 2820 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить … Development of temperature control and management systemsViews: 88 Catcatcat Electronics Пошта для контакту e-mail: catcatcat.electronics@gmail.com
Development of temperature control and management systemsViews: 88 Catcatcat Electronics Пошта для контакту e-mail: catcatcat.electronics@gmail.com Просто о структурах и объединениях в СиViews: 2162 Какие задачи нам позволяют решать структуры и объединения? Для разработчика встроенных систем эффективность и компактность кода всегда на первом месте. Если программировании на Ассемблере ты сам определяешь как …
Просто о структурах и объединениях в СиViews: 2162 Какие задачи нам позволяют решать структуры и объединения? Для разработчика встроенных систем эффективность и компактность кода всегда на первом месте. Если программировании на Ассемблере ты сам определяешь как … I2C MODULE – PIC18F25K42 Device ID Revision = A001Views: 1075 I2C MODULE Обход ошибок в версии I2C MODULE – PIC18F25K42 Device ID Revision = A001 В Серии K42 применен совершенно новый модуль шины I2C, который позволяет поддерживать все …
I2C MODULE – PIC18F25K42 Device ID Revision = A001Views: 1075 I2C MODULE Обход ошибок в версии I2C MODULE – PIC18F25K42 Device ID Revision = A001 В Серии K42 применен совершенно новый модуль шины I2C, который позволяет поддерживать все …