
Views: 1045
Тестирование модуля GP4SF1109F2 от фирмы Global Position eXpert Co., Ltd
GPS (англ. Global Positioning System — система глобального позиционирования, читается Джи Пи Эс) — спутниковая система навигации, обеспечивающая измерение расстояния, времени и определяющая местоположениe. Позволяет в любом месте Земли (не включая приполярные области), почти при любой погоде, а также в космическом пространстве вблизи планеты определить местоположение и скорость объектов. Система разработана, реализована и эксплуатируется Министерством обороны США.
Основной принцип использования системы — определение местоположения путём измерения моментов времени приема синхронизированного сигнала от навигационных спутников антенной потребителя. Для определения трёхмерных координат GPS-приёмнику нужно иметь четыре уравнения: «расстояние равно произведению скорости света на разность моментов приема сигнала потребителя и момента его синхронного излучения от спутников»… более подробно на http://ru.wikipedia.org/wiki/GPS
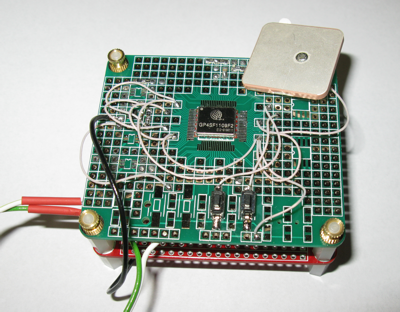
Для тестирования применена плата ILLISSI-M4B04 и плата ILLISSI-4B-05-primum PIC18F25K20 3V3 в качестве USB-USART. На плате ILLISSI-4B установлены джамперы которые позволяют использовать драйвер самостоятельно.
Основные характеристики модуля.
| Чип модуль | GSD4eTM WLCSP (the new SiRFstar IVTM architecture) |
| Частота | L1 1575.42MHz, C/A code |
| Каналы | 48 |
| Частота обновления | 1Hz |
| Скорость передачи данных | 4800bps |
| Чувствительность | Отслеживание – 163dBm |
| Захват – 148dBm | |
| Время захвата | Горячий старт (открытое небо) < 2s |
| Горячий старт (в помещении) < 15s | |
| Холодный запуск (открытое небо) 37s (типичное) | |
| Точность позиционирования | Автономный < 5m (2D RMS) |
| SBAS < 2.5m (2D RMS) | |
| Max. высота | < 18,000 m |
| Max. скорость | < 1,000 km/h |
| Power | Непрерывное отслеживание: 58 mW (~0,060 мА) |
| Ток спящем режиме: 20 uA | |
| TricklePower(1Hz) : 8 mW | |
| Protocol Support:NMEA 0183 | NMEA 0183 8 data bits, no parity, 1 stop bits (default), 1Hz: GGA, GSA, RMC; 5Hz: GSV(после фиксации) |
The GP4SF1109F2 Приемный модуль поддерживает 4 вида NMEA сообщений формата:GGA, GSA, RMC, GSV. GSV данные – доступны после фиксации спутников.
| NMEA протокол | Описание |
| GGA | GPS зафиксированные данные |
| GSA | GNSS DOP и активные спутники |
| GSV | GNSS спутников в поле зрения |
| RMC | Рекомендуемые минимальные характеристики GNSS данных |
Физически модуль представляет собой (вид сверху):
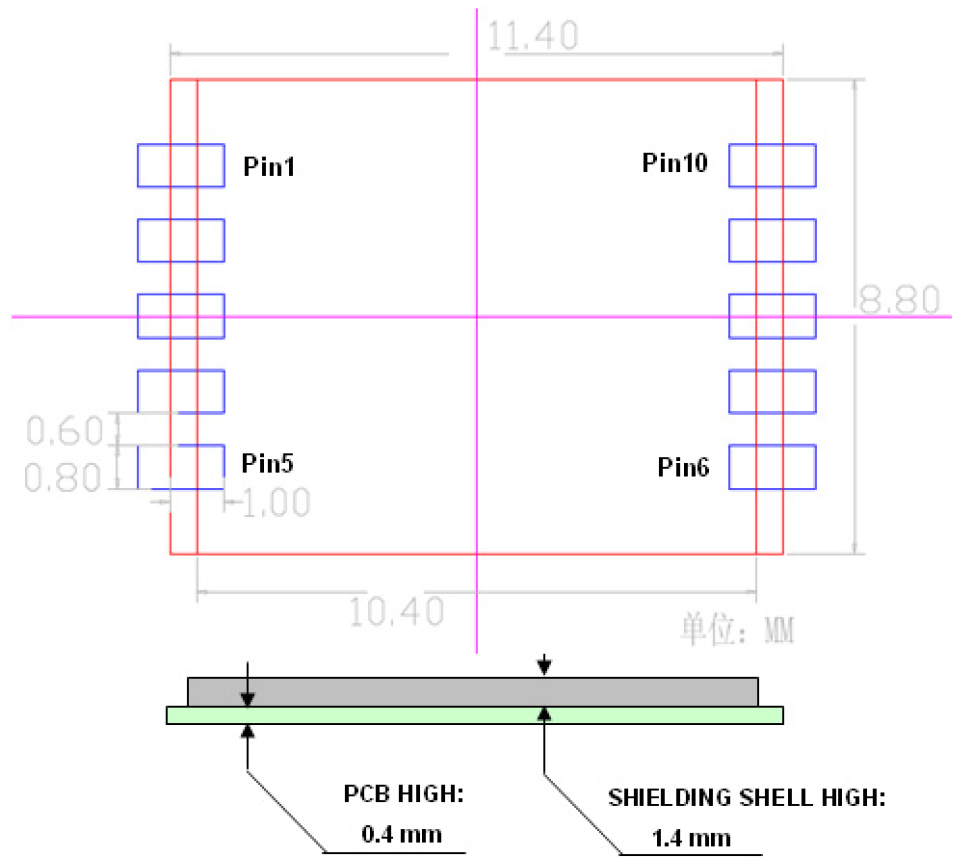
Назначение выводом модуля:
| Номер вывода | Название | Функция | Описание |
| 1 | VIN | I | DC напряжение питания VIO=1.8V |
| 2 | GND | G | Общий |
| 3 | RXD | I | Последовательный порт VIO=1.8V |
| 4 | TXD | O | Последовательный портVIO=1.8V |
| 5 | GND | G | Общий |
| 6 | GND | G | Общий |
| 7 | RF_IN | I | Вход GPS сигнала |
| 8 | GND | G | Общий |
| 9 | N/S | I | Выключает модуль отрицательным импульсом до 0,5с, отрицательным импульсом >3 секунды, перезапускает или включает модуль. |
| 10 | ON/OFF | I | Включает модуль на переходе 0/1 |
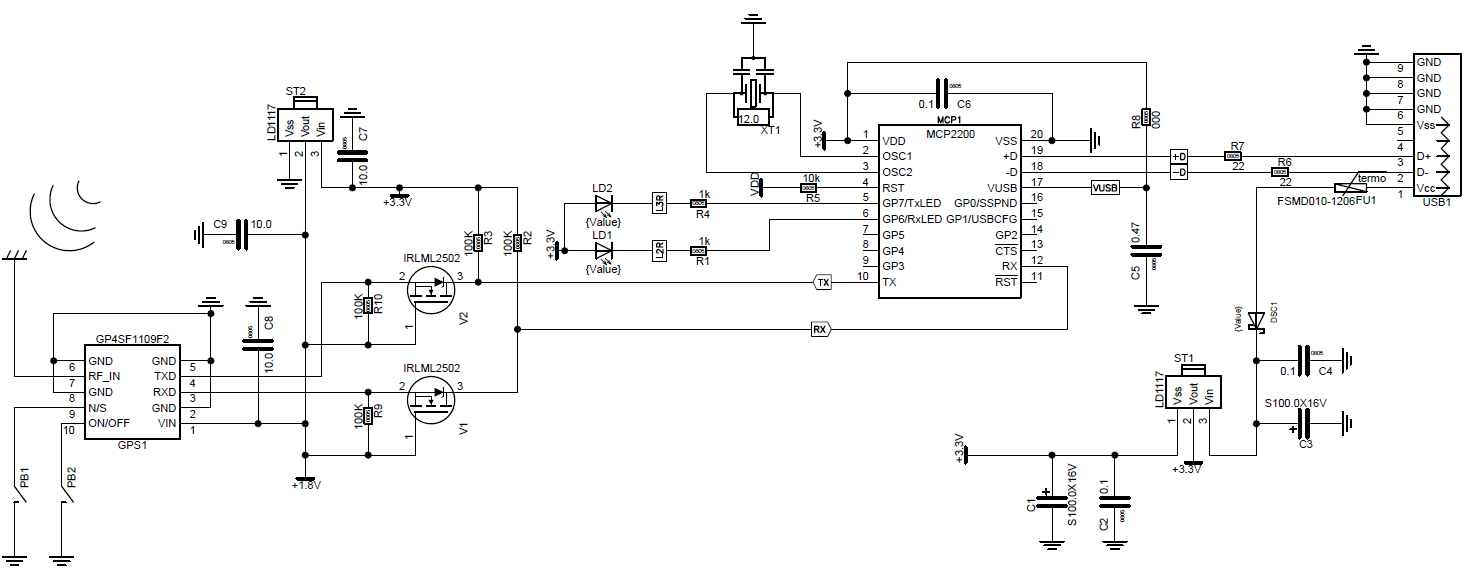
Вариант подключения модуля для работы с логикой 3,3 вольта:
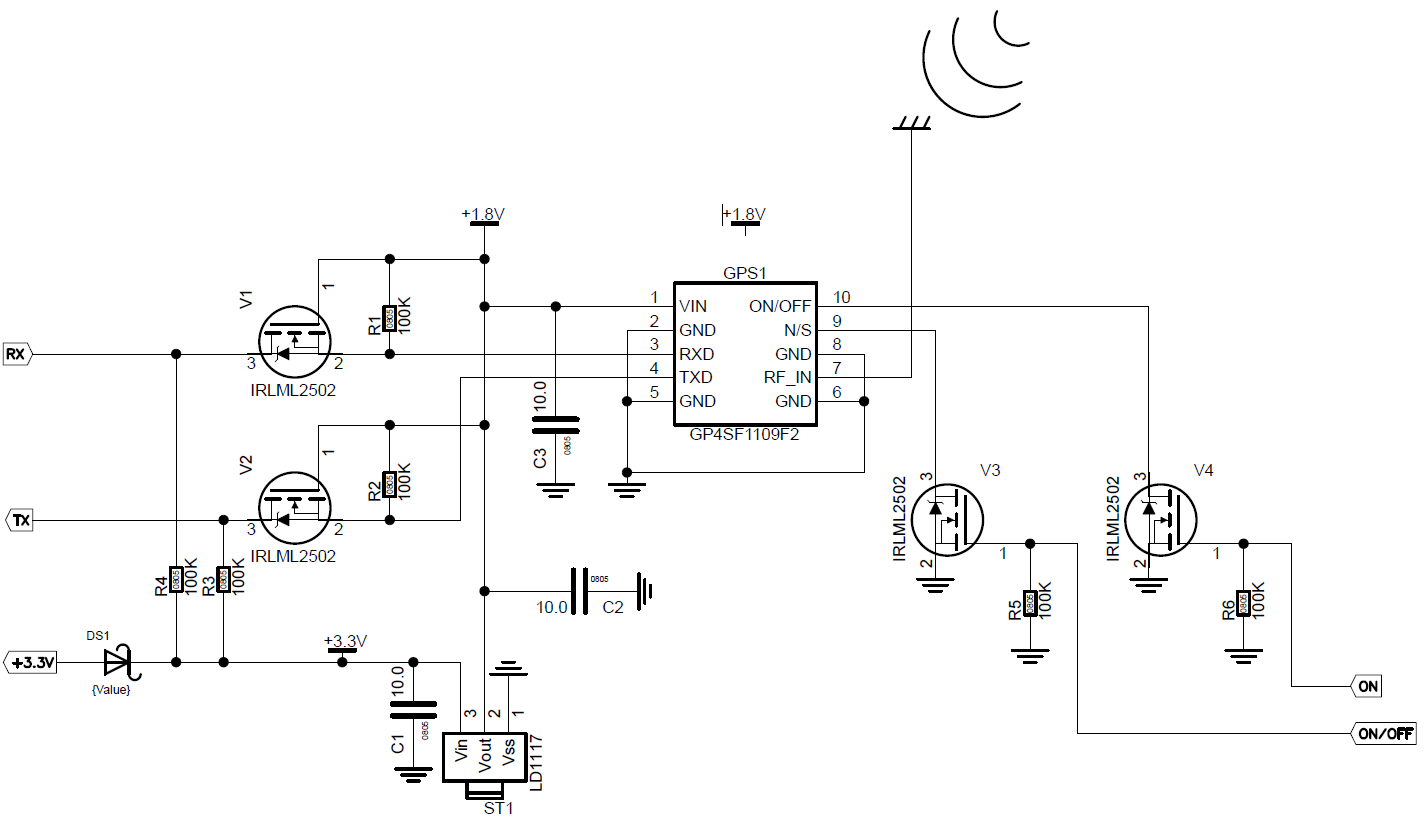 Схема подключения модуля для тестирования:
Схема подключения модуля для тестирования:
 Для контроля передаваемых последовательностей используем гипертерминал.
Для контроля передаваемых последовательностей используем гипертерминал.
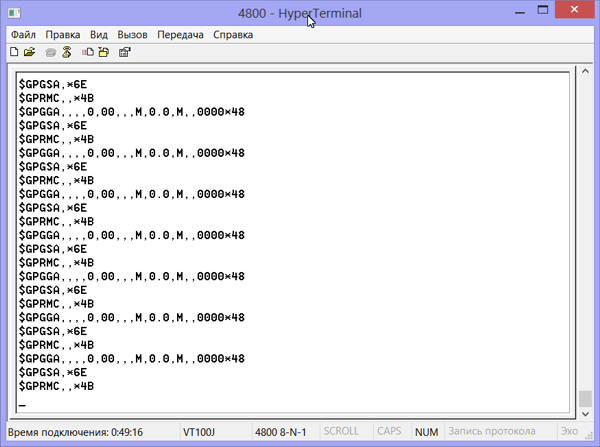
Формируемые последовательности данных модулем:
После включения питания или после выхода их спящего состояния модуль выдает следующие последовательности (4 раза):
Последовательность при отсутствии видимости спутников.
$PSRF156,26,3,1,1,4c,0*75
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
$PSRF156,26,3,1,1,4c,0*75
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
$PSRF156,26,3,1,1,4c,0*75
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
После этого модуль повторяет три команды, с периодом в 1секунду:
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
$GPGGA,,,,0,00,,,M,0.0,M,,0000*48
$GPGSA,*6E
$GPRMC,,*4B
При отсутствии видимости спутников данные в передачи отсутствуют.
Описание передаваемых команд:
GGA – Global Positioning System Fixed Data
Пример сообщения GGA:
$GPGGA,053740.000,2503.6319,N,12136.0099,E,1,08,1.1,63.8,M,15.2,M,,0000*64
Таблица 1.
| Название | Пример | Единица | Описание |
| Message ID | $GPGGA | Заголовок сообщения GGA | |
| UTC Time | 53740 | hhmmss.sss – время UTC | |
| Latitude | 2503.6319 | ddmm.mmmm – широта | |
| N/S Indicator | N | N = северная или S = южная широта | |
| Longitude | 12136.01 | dddmm.mmmm – долгота | |
| E/W Indicator | E | E = восточная или W = западная долгота | |
| Position Fix Indicator | 1 | См. таб. 2 | |
| Satellites Used | 08 | Видимых спутников от 0 до 12 | |
| HDOP | 1.1 | Фильтр точности по горизонтали | |
| MSL Altitude | 63.8 | метры | |
| Units | M | метры | |
| Geoid Separation1 | 15.2 | метры | |
| Units | M | метры | |
| Age of Diff. Corr. | секунды | Пусто если DGPS не используется | |
| Diff. Ref. Station ID | 0 | ||
| Checksum* | *64 | Контрольная сумма | |
| <CR><LF> | Конец сообщения |
Таблица 2. Флаг фиксации позиции.
| Значение | Описание |
| 0 | Позиция не определена, данные недоступны или недостоверны. |
| 1 | Режим GPS, режим SPS, координаты достоверны. |
| 2 | Дифференциальная GPS (DGPS), режим SPS, координаты достоверны. |
| 3 | Не поддерживается. |
| 6 | Точный расчет траектории, координаты достоверны. |
Контрольная сумма: 8-битовая сумма (XOR) ASCII кодов всех символов (включая “,”) в последовательности между символами “$” и “*” (исключая их). Результат сложения записывается в реальном виде после символа “*”.
GSA—GNSS DOP and Active Satellites
Пример сообщения GSA:
$GPGSA,A,3,24,07,17,11,28,08,20,04,,,,,2.0,1.1,1.7*35
Таблица 3.
| Название | Пример | Описание |
| Message ID | $GPGSA | GSA заголовок протокола |
| Mode 1 | A | См. таблицу 4 |
| Mode 2 | 3 | См. таблицу 5 |
| ID of satellite used | 24 | Уровень сигнала на 1-й канал |
| ID of satellite used | 07 | Уровень сигнала на 2-й канал |
| …… | …… | |
| ID of satellite used | Уровень сигнала на 12-й канал | |
| PDOP | 2 | Ухудшение точности позиционирования |
| HDOP | 1.1 | Снижение точности по горизонтали |
| VDOP | 1.7 | Снижение точности по вертикали |
| Checksum | *35 | |
| <CR> <LF> | Конец сообщения |
Таблица 4.
| Значение | Описание |
| M | Вручную – вынуждена работать в 2D или 3D режиме |
| A | Автоматически – разрешено для автоматического переключения 2D/3D |
Таблица 5.
| Значение | Описание |
| 1 | Координаты недоступны |
| 2 | 2D |
| 3 | 3D |
GSV—GNSS Satellites in View
Пример сообщения GSV:
$GPGSV,3,1,12,28,81,285,42,24,67,302,46,31,54,354,,20,51,077,46*73
$GPGSV,3,2,12,17,41,328,45,07,32,315,45,04,31,250,40,11,25,046,41*75
$GPGSV,3,3,12,08,22,214,38,27,08,190,16,19,05,092,33,23,04,127,*7B
Таблица 6.
| Название | Пример | Единицы измерения | Описание |
| Message ID | $GPGSV | GSV protocol header | |
| Total number of messages1 | 3 | Range 1 to 3 | |
| Message number1 | 1 | Range 1 to 3 | |
| Satellites in view | 12 | ||
| Satellite ID | 28 | Channel 1 (Range 01 to 32) | |
| Elevation | 81 | degrees | Channel 1 (Range 00 to 90) |
| Azimuth | 285 | degrees | Channel 1 (Range 000 to 359) |
| SNR (C/No) | 42 | dB-Hz | Channel 1 (Range 00 to 99, null when not tracking) |
| Satellite ID | 20 | Channel 4 (Range 01 to 32) | |
| Elevation | 51 | degrees | Channel 4 (Range 00 to 90) |
| Azimuth | 77 | degrees | Channel 4 (Range 000 to 359) |
| SNR (C/No) | 46 | dB-Hz | Channel 4 (Range 00 to 99, null when not tracking) |
| Checksum | *73 | ||
| <CR> <LF> |
RMC—Recommended Minimum Specific GNSS Data
Пример сообщения RMC:
$GPRMC,053740.000,A,2503.6319,N,12136.0099,E,2.69,79.65,100106,,,A*53
Таблица 7.
| Название | Пример | Единицы измерения | Описание |
| Сообщение ID | $GPRMC | RMC protocol header | |
| UTC Time | 53740 | hhmmss.sss | |
| Статус | A | A=data valid or V=data not valid | |
| Широта | 2503.6319 | ddmm.mmmm | |
| N/S Indicator | N | N = северная или S = южная широта | |
| Долгота | 12136.01 | dddmm.mmmm | |
| E/W индикатор | E | E = восточная или W = западная долгота | |
| Скорость относительно земли | 2.69 | True | |
| Курс относительно земли | 79.65 | ||
| Дата | 100106 | ddmmyy | |
| Магнитное склонение | |||
| Изменение | E=east or W=west (Not shown) | ||
| Режим | A | A=autonomous, D=DGPS, E=DR | |
| Checksum | *53 | ||
| <CR> <LF> | Конец сообщения |
Файлы для загрузки
Описание модуля GP4SF1109F2 [wpdm_file id=214 template=”link-template-calltoaction3.php”]
Протокол NMEA [wpdm_file id=215 template=”link-template-calltoaction3.php”]
NMEA0183 [wpdm_file id=216 template=”link-template-calltoaction3.php”]
Это может быть интересно
 VU Meter Tower ARTViews: 1607 Стерео индикатор уровня аудио сигнала. Компактность и удобство проектирования устройств на светодиодах WS2812B, а также легкость реализации алгоритма родило идею созданию своей конструкции. В этом проекте я предоставлю …
VU Meter Tower ARTViews: 1607 Стерео индикатор уровня аудио сигнала. Компактность и удобство проектирования устройств на светодиодах WS2812B, а также легкость реализации алгоритма родило идею созданию своей конструкции. В этом проекте я предоставлю … Development Boards PIC18F47Q84Views: 2827 Microchip тішить новими мікроконтролерами. Особливістю цього MCU – це багата інтелектуальна периферія, що дозволяє вирішувати такі завдання на 8 бітних MCU, які неможливо реалізувати на деяких навіть 32 …
Development Boards PIC18F47Q84Views: 2827 Microchip тішить новими мікроконтролерами. Особливістю цього MCU – це багата інтелектуальна периферія, що дозволяє вирішувати такі завдання на 8 бітних MCU, які неможливо реалізувати на деяких навіть 32 … MCC – K42 – настройка модуля DMAViews: 767 MCC – в версии v.3.95.0 и начиная ядра 4.85.0 конфигуратор предоставляет графический интерфейс для настройки модуля DMA. Для начала: Посмотреть какая версия МСС можно в закладке версии, если …
MCC – K42 – настройка модуля DMAViews: 767 MCC – в версии v.3.95.0 и начиная ядра 4.85.0 конфигуратор предоставляет графический интерфейс для настройки модуля DMA. Для начала: Посмотреть какая версия МСС можно в закладке версии, если … Одноканальный емкостной сенсор – AT42QT1012Views: 2336 Описание сенсора [wpdm_file id=242] Незаконченный проект, так-как сенсор не оправдал своего назначения, не рекомендую, просто выброшенные деньги. Особенности. • Количество сенсоров – один, режим переключения ( touch-on/touch-off ), а также программируемая …
Одноканальный емкостной сенсор – AT42QT1012Views: 2336 Описание сенсора [wpdm_file id=242] Незаконченный проект, так-как сенсор не оправдал своего назначения, не рекомендую, просто выброшенные деньги. Особенности. • Количество сенсоров – один, режим переключения ( touch-on/touch-off ), а также программируемая … Индикатор температурыViews: 2672 Проект для начинающих, на демо плате BB-2T3D-01. Простой индикатор температуры. Проект никак не задумывался, просто на витрину магазин Ворон нужна была демонстрационная модель на макетной плате, чего нибудь работающего. Остановились на индикаторе …
Индикатор температурыViews: 2672 Проект для начинающих, на демо плате BB-2T3D-01. Простой индикатор температуры. Проект никак не задумывался, просто на витрину магазин Ворон нужна была демонстрационная модель на макетной плате, чего нибудь работающего. Остановились на индикаторе … Счетчики посетителейViews: 1270 Вас сосчитали!? или счетчики посетителей. Для чего нужны счетчики посетителей? Какие они бывают? ТОРГОВЛЯ. Подсчитайте, сколько ваш магазин посещает человек за день. Кок много человек приходит утром, какое …
Счетчики посетителейViews: 1270 Вас сосчитали!? или счетчики посетителей. Для чего нужны счетчики посетителей? Какие они бывают? ТОРГОВЛЯ. Подсчитайте, сколько ваш магазин посещает человек за день. Кок много человек приходит утром, какое … CAN – Controller Area NetworkViews: 1093 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, …
CAN – Controller Area NetworkViews: 1093 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, … Регулятор влажностиViews: 1389 Регулятор ILLISSI-CH-1000 предназначен для контроля и регулировки относительной влажности в диапазоне от 0 до 100%. Регулятор позволяет работать как в режиме осушения, так и увлажнения. Для измерения возможно …
Регулятор влажностиViews: 1389 Регулятор ILLISSI-CH-1000 предназначен для контроля и регулировки относительной влажности в диапазоне от 0 до 100%. Регулятор позволяет работать как в режиме осушения, так и увлажнения. Для измерения возможно … Простой цифровой регулятор мощностиViews: 6660 Простой регулятор мощности с цифровой индикацией. Этот проект создан как обучающий, для ознакомления с основами построения сетевых регуляторов мощности. Устройства подобного типа можно использовать для управления освещением, скоростью …
Простой цифровой регулятор мощностиViews: 6660 Простой регулятор мощности с цифровой индикацией. Этот проект создан как обучающий, для ознакомления с основами построения сетевых регуляторов мощности. Устройства подобного типа можно использовать для управления освещением, скоростью … Гаджеты для домашней автоматики – Датчик движенияViews: 1452 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет …
Гаджеты для домашней автоматики – Датчик движенияViews: 1452 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет …