
Views: 1831

Еще раз об управлении светодиодами на драйвере WS2812 и ему подобных. Как известно эти светики управляются по однопроводной шине. Основная особенность, что программно можно описать передачу данных, но это будет поглощать значительную часть времени работы микроконтроллера, но в новых микроконтроллерах появилась возможность организовать этот интерфейс с применением периферии.
И так с самого начала как выглядит протокол передачи данных по шине, например, для 4 светодиодов соединенных последовательно?

Каждый светодиод представляет собой внутри сдвиговый регистр, в который необходимо загрузить 24 бита данных (8 бит на каждый свет) для формирования яркости его свечения. Для управления 4 светодиодами нам необходимо сформировать последовательность из 96 бит или из 12 байт. Эту последовательность необходимо подать на вход первого светодиода. Рассмотрим как будет выглядеть передача данных по шине:

Т.е. если нам необходимо управлять 4 светодиодами. то нам необходимо сформировать буфер данных и передать их через порт, предварительно сформировав в начале длительность низкого уровня не короче 50 мкСек. Этот длительность очень зависит от количество светодиодов на шине и при значительном количестве его надо увеличивать. Почему? Каждая микросхема светодиода имеет небольшую задержку в передачи сигнала и сформированный на входи импульс синхронизации обязан пройти через все светики, чтобы все они переключились в исходное состояние по приёму данных. Эту задержку надо учитывать чтобы перед последним светодиодом импульс синхронизации был не менее 50 мкСек. Т.е. реально чтобы выбрать между скоростью передачи и надёжностью, надо искать компромисс. В длинных цепочках этот импульс может достигать миллисекунд.
Что собой представляет структура данных, как формируется бит передачи логической единицы и нуля. Из описания на эти драйверы мы видим для формирования передачи логического нуля надо сформировать:
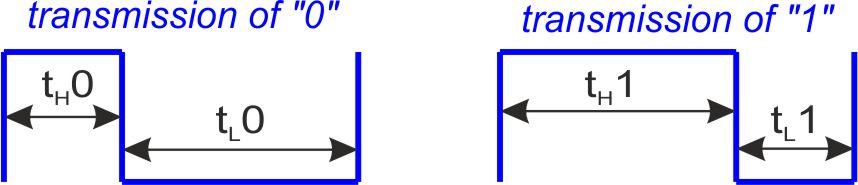
С технической документации нам рекомендуют, чтобы длительность передачи tH + tL = 1.25μs±600ns.
| Параметр | Описание | Длительность |
Допуск |
| tH0 | Длительность высокого уровня при передачи 0 | 0.4us | ±150ns |
| tL0 | Длительность низкого уровня при передачи 0 | 0.8us | ±150ns |
| tH1 | Длительность высокого уровня при передачи 1 | 0.85us | ±150ns |
| tL1 | Длительность низкого уровня при передачи 1 | 0.45us | ±150ns |
| bus sync pulse | Длительность импульса синхронизации | более 50μs |
Я уже описывал как программно формировать протокол передачи для WS2812, но в новых микроконтроллерах с использование аппаратных средств это можно сделать намного эффективней. Основные преимущества нам даст наличие модуля CLC. Разберем последовательно как с применением аппаратных модулей можно сформировать передачу данных. Для тестирования я использовал PIC18F25K42, т.е для повторения подойдут все МК 18 серии которые заканчиваются на 42. Для передачи данных нам необходимо использовать SPI модуль микроконтроллера. Как выглядят данные при передачи например, двух байт 0x55 и 0xAA.
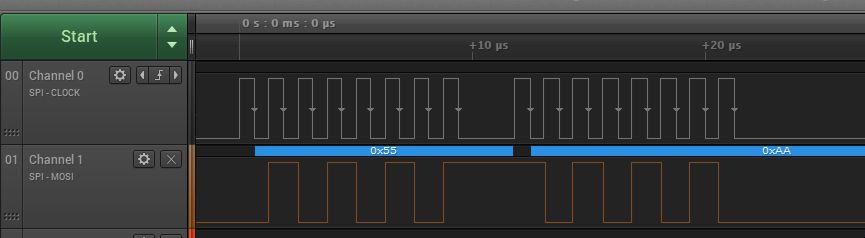
Данные на выходе SPI реально не подходят для передачи данных для WS2812, но сформировать корректные длительности нам поможет CLC модуль. Нам необходимо взять данные на выходе SPI модуля и в зависимости от уровня формировать 0 или 1 для формирования данных. Нам необходимо две длительности импульса высокого уровня 0.8us и 0.45us. Для большой длительности можно использовать длительность импульса из синхронизации его длительность 0,625us (для скорости передачи данных 800 кГц) это близко к минимальной длительности по техническому описанию. А для формирования малой длительности импульса будем использовать PWM модуль настроив его на формирования импульса требуемой длительности.
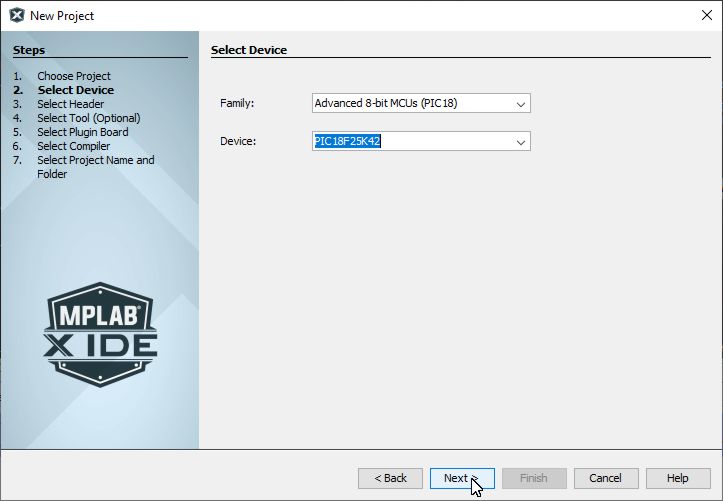
Как это будут выглядеть при создании проекта, новый проект:
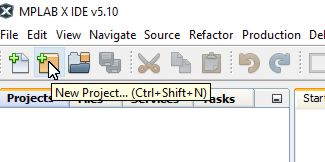 Выбираем стандартный проект:
Выбираем стандартный проект:
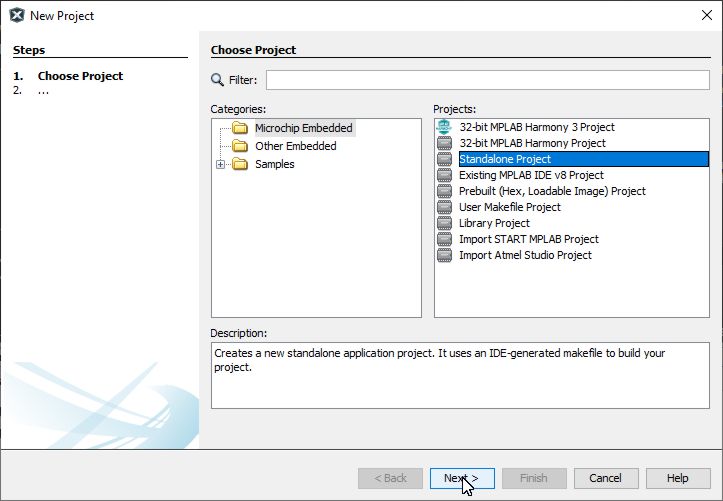
Выберем микроконтроллер:
Выберем инструмент для программирования:

Выберем версию компилятора:

Зададим имя и каталог для хранения проекта, а также не забудем о кодировке:

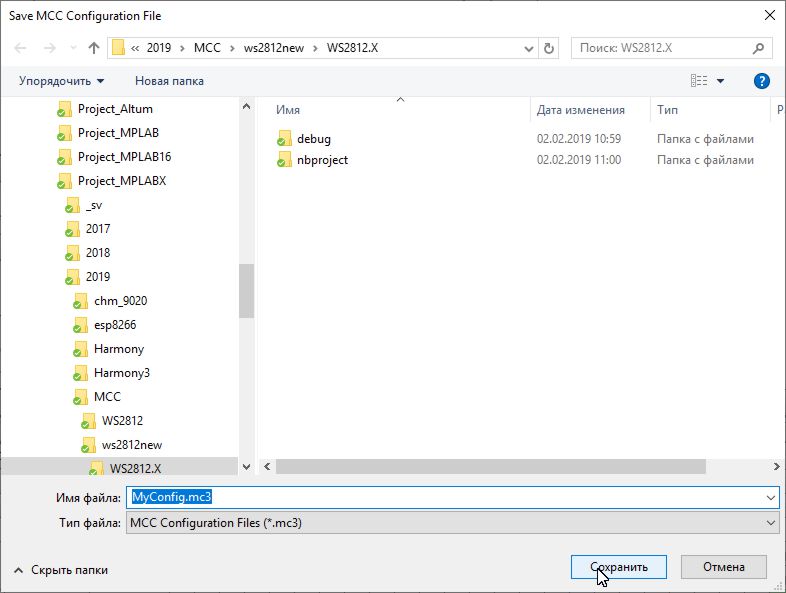
Нажмем финиш и начальная подготовка проекта закончена. Пока у нас просто пустой каталог. Запустим MCC:

Конфигуратор попросит указать имя конфигурации и место его хранения, если у вас предполагает единственная конфигурация (например, только для одного типа контроллера) все можно оставить как есть и нажать ok!
После этого нам отрется окно конфигуратора, настройку начнем с тактового генератора.
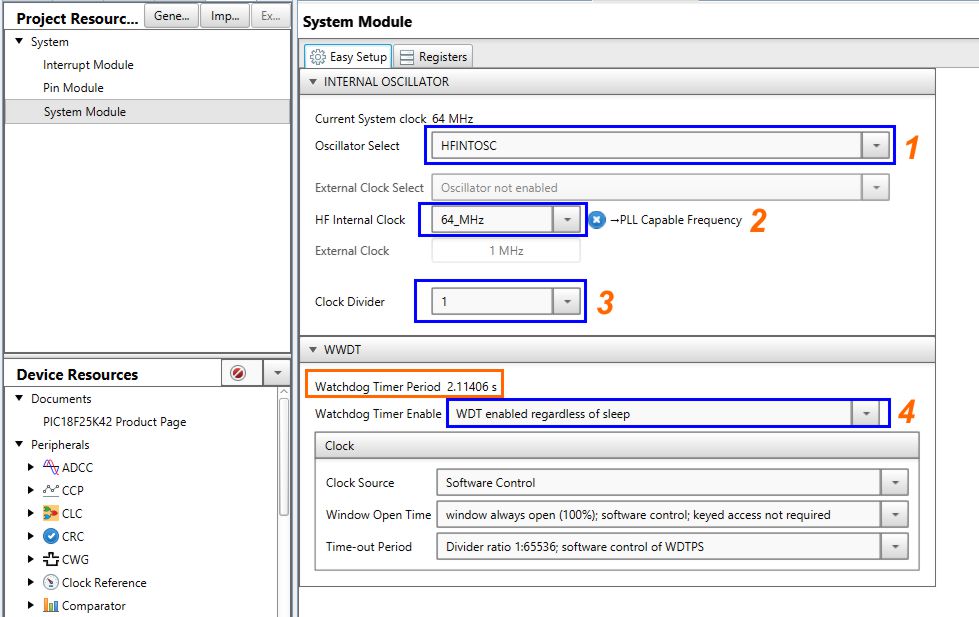
Установим работу от внутреннего генератора (1), выберем скорость 64 МГц (хотя тут можно выбрать частоту в зависимости от вашего необходимого энергопотребления, но я люблю по быстрее), делитель установим на 1. Включим сторожевой таймер на постоянно. Зачем нам сторожевой таймер в демопроекте? Да можно без сторожевого таймера, но в реальном проекте без него никак не обойтись, по этому учимся и его использовать и включаем. Нам сразу предлагается период 2 секунды, что это значит? Это значит, что программа в при своей нормальной работе, должна как минимум не позднее чем через две секунды сбрасывать сторожевой таймер. Если эта процедура не будут выполнена, то считается, что контроллер “завис” и сторожевой таймер апаратно перезапустит систему.
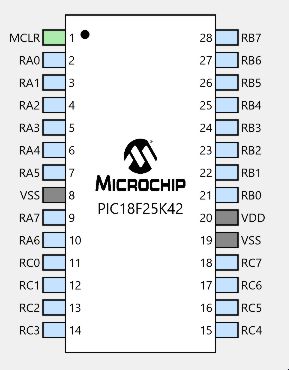
Дополнительно обратите внимание на выводы микроконтроллера это даст в последующем возможность оценить графические возможности MCC.
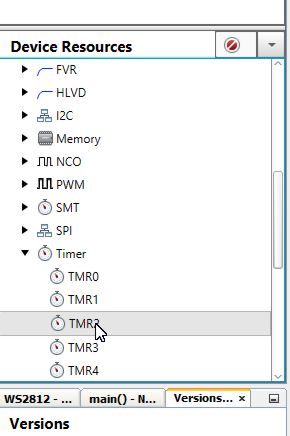
Следующий этап нам надо задать тактовую частоту для SPI, PWM модулей, для этого будут использовать таймер Т2. В окне ресурсы проекта выберем таймер 2.
Первое, что сделаем этот выберем от какого источника синхронизировать таймер, выберем FOSC/4 – это необходимо, чтобы можно было от него управлять модулем PWM. Какой период таймера? По тех описанию тактовая частота передачи данных для WS2812 должна быть 800 кГц. Длительность периода составляет 0.00000125 секунды. Но это период для WS2812, для таймера необходимо работать в два раза быстрее, чтобы сформировать период 800 кГц. это 0.000 000 625 или 625 нСек. Настроим таймер:
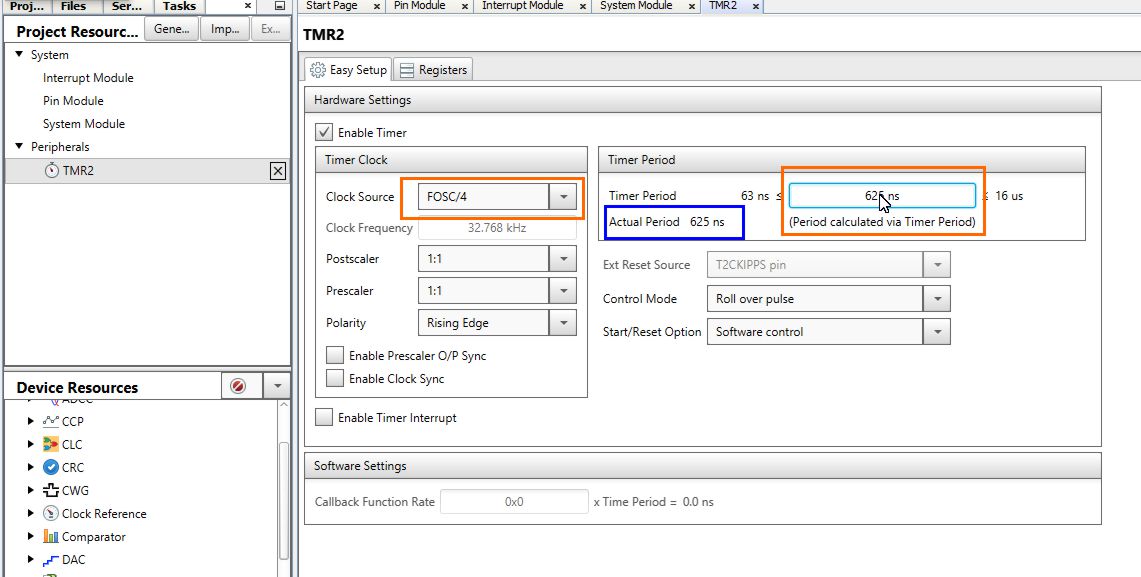
Обновление от 03/2021
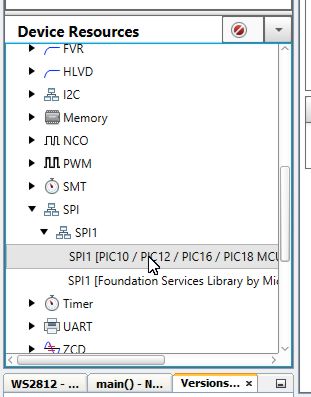
![]() Таймер настроили. следующее подключим SPI модуль.
Таймер настроили. следующее подключим SPI модуль.
Настроим модуль указав, что он работает в режиме главного (ведущего, мастера) и тактируется от таймера 2, проверим, правильная частота получилась 800 кГц….
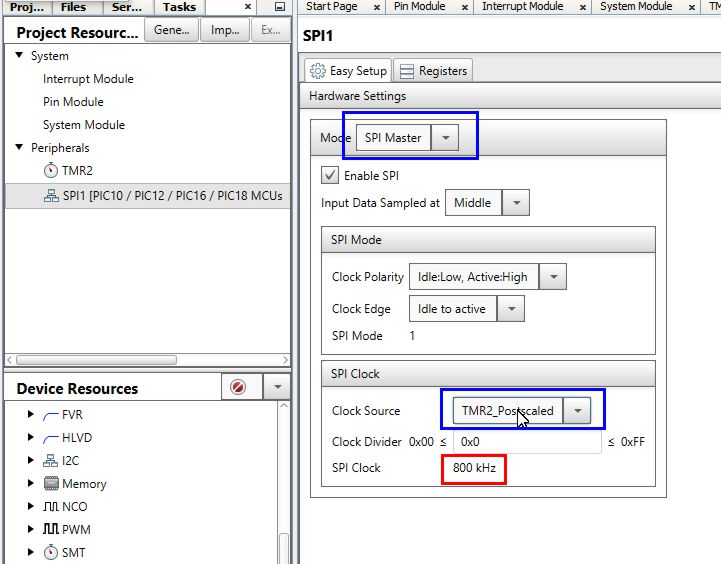
Обновление 03/2021![]()
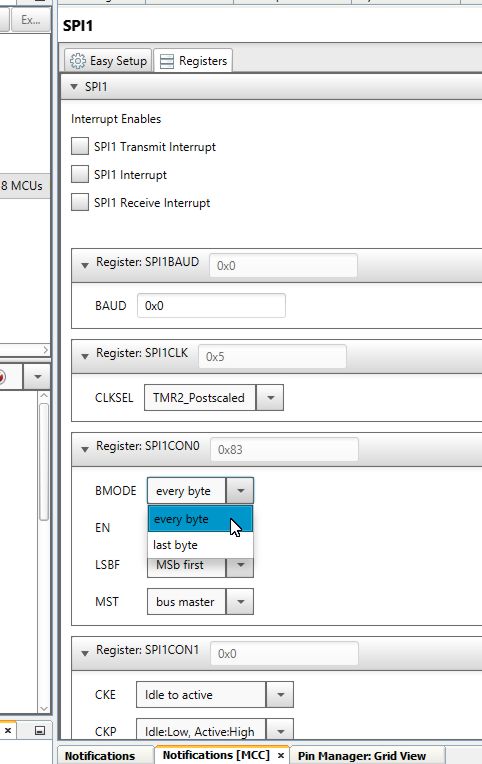
Настроим еще два параметра для SPI. Нам необходимо настроить, следующим образом:

 Обновлено 03/2021
Обновлено 03/2021
![]()
BMODE: выбора режима длины. если 1 = настройка SPIxTWIDTH применяется к каждому байту: общее количество отправленных битов равно SPIxTWIDTH * SPIxTCNT, конец пакета происходит, когда SPIxTCNT = 0.
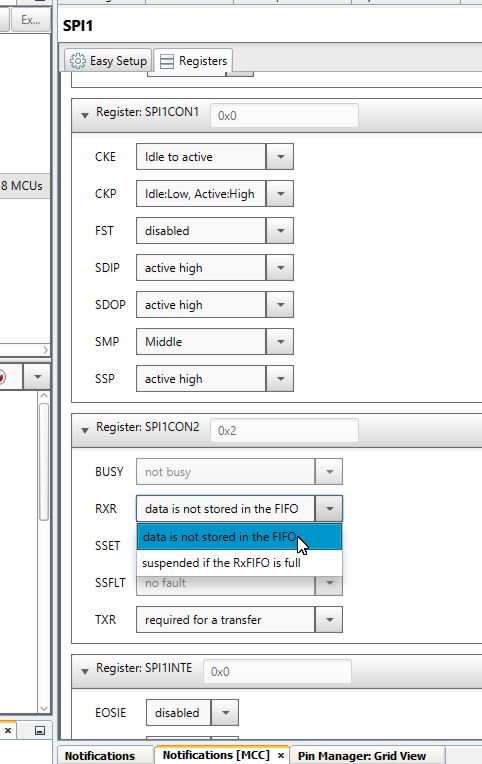
RXR: – 0 = полученные данные не сохраняются в FIFO.
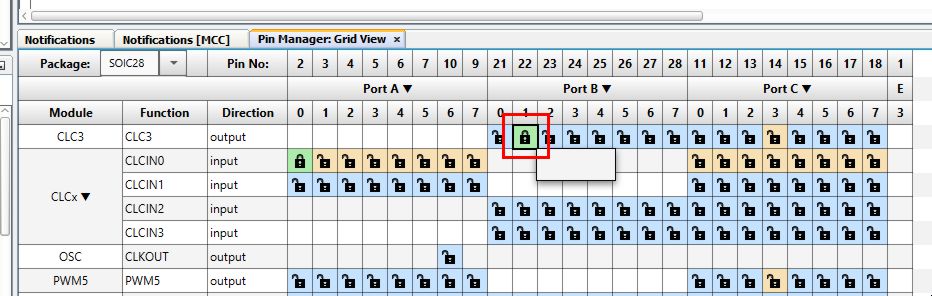
Посмотрим распиновку:
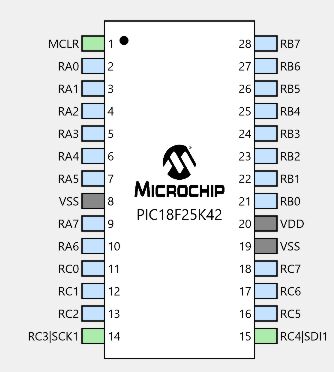
Настраивать периферию в MCC песня!!!
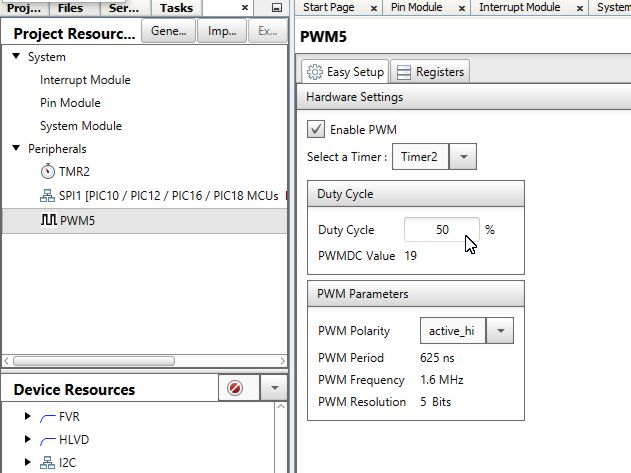
Ok!!! Следующее настроим PWM модуль.
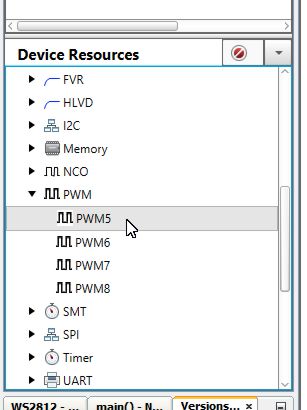
В настройке ничего в принципе делать не надо, у нас период ШИМ 625 нСек, 50% 312 нСек, это в допуске для импульса формирования 0.
Теперь мы имеем модуль для передачи данных SPI с которого можно взять управление и импульсы длительностью для формирования логической “1”, модуль PWM с которого можно взять импульс для формирования логического “0”, надо их чем то объединить, для этого и используем модуль CLC!!!
Добавим модуль. Выберем CLC3, почему 3!? В принципе можно выбрать любой модуль, разница заключается только в том, что выходы модуля могут быть сконфигурируемы, только для определённого порта, например CLC1 на порт A, CLC3 на порт B, а мне надо на порт RB1, я хочу подключить (ну уже припаял соединитель, ну кому легко).
 для нас откроется окно
для нас откроется окно
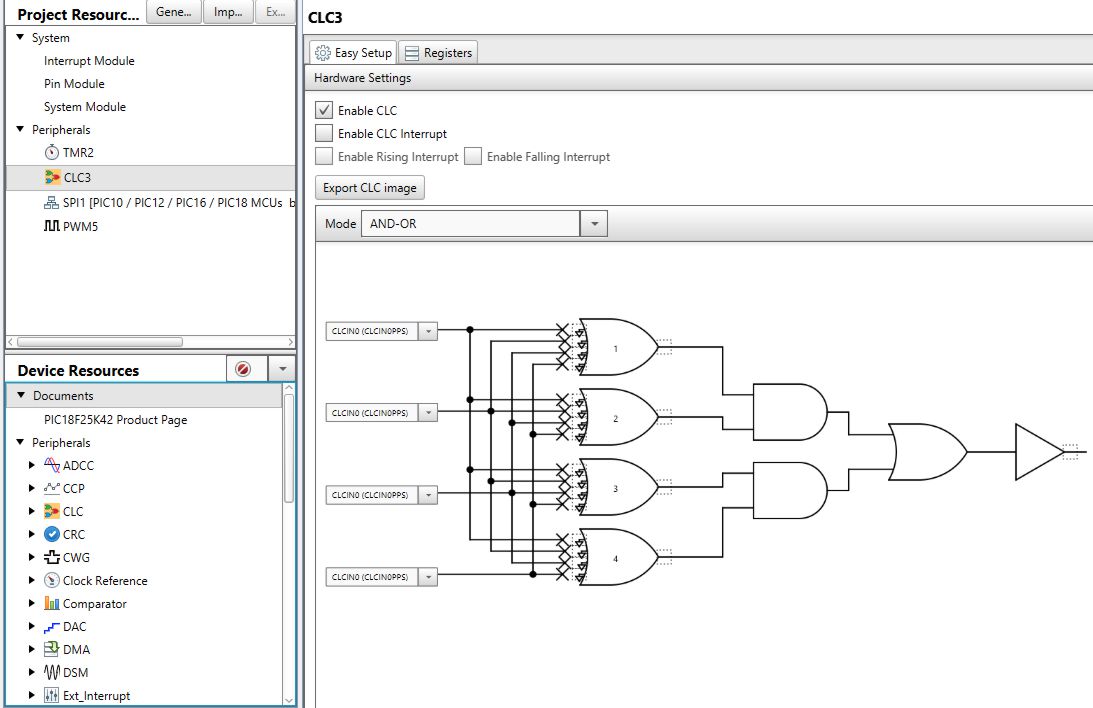
Что с этим делать? Мы имеет три источника данных выход PWM, выход синхронизации и выход данных SPI. Подключим их!
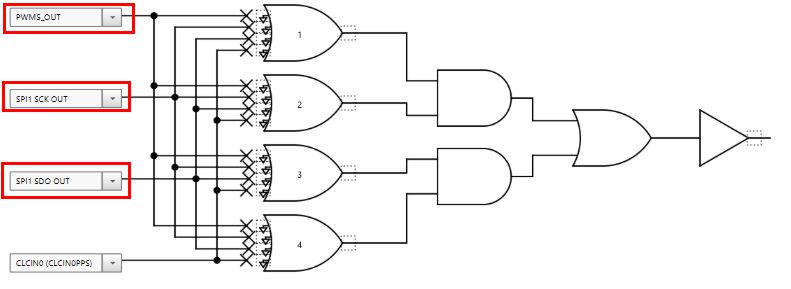
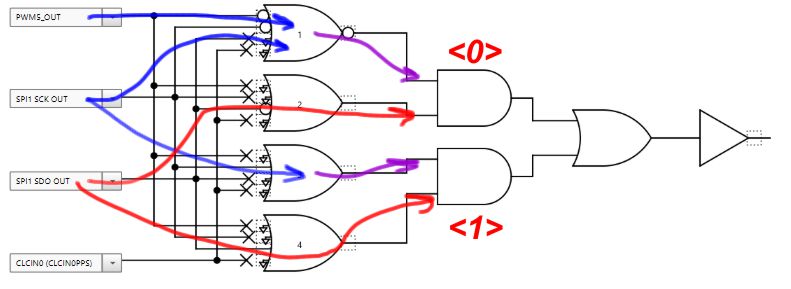
Дальше пойдём логическим путём, нам нужен переключатель, между SCK и PWM для выбора данных которые находятся на SDO. Т.е. данные SDO должны управлять? Для этого мы будем использовать И и ИЛИ элементы. Выход PWM подключим инверсно на элемент ИЛИ 1 и естественно про инвертируем выход, чтобы не потерять логику сигнала. Выход SCK модуля SPI подключим на прямую на вход модуля ИЛИ 3. Теперь сделаем переключатель, чтобы при нуле на SDO выбирались сигнал с PWM, а при логической “1” на шине SDO с SCK. Еще необходимо учесть, что формирование логического нуля было возможно только в одном полупериоде SLK для этого надо сделать сборку по ИЛИ на модуле 1 сигналов PWM и SLK. Реально нам надо выполнить следующую логическую функцию
(SCK & nSDO & PWM) || ( SCK & SDO)
Мышкой кликаем на точках подключения и настраиваем модуль, выглядеть должно быть так:
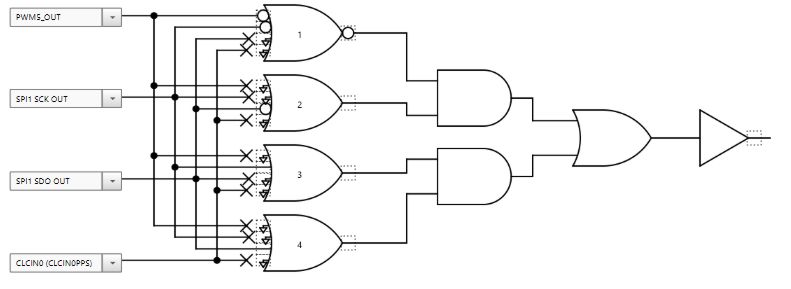 Для наглядности нарисую стрелками где у нас формируются логический нуль и логическая единица для передачи данных.
Для наглядности нарисую стрелками где у нас формируются логический нуль и логическая единица для передачи данных.
Обновлено 03/2021
![]()
От состояния SDO логика переключается на формирование логического нуля или единице, с элемента 1 формируется логический ноль, а с элемента 4 логическая единица.
Теперь настроим выход модуля CLC для подключения ко входу светодиодов.
Запустим конфигуратор на выполнение:
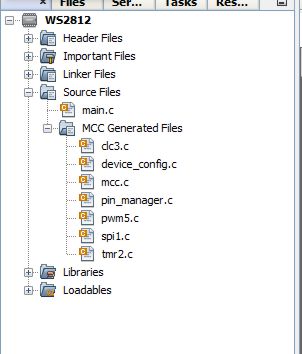
После выполнения в проект будут добавлены файлы:
Откроем файл main и добавим следующий код для тестирования интерфейса, не забудем, что мы включили сторожевой таймер!
void main(void)
{
// Initialize the device
SYSTEM_Initialize();
// If using interrupts in PIC18 High/Low Priority Mode you need to enable the Global High and Low Interrupts
// If using interrupts in PIC Mid-Range Compatibility Mode you need to enable the Global Interrupts
// Use the following macros to:
// Enable the Global Interrupts
//INTERRUPT_GlobalInterruptEnable();
// Disable the Global Interrupts
//INTERRUPT_GlobalInterruptDisable();
CLRWDT(); //сброс сторожевого таймера +++++++++++++++++++++-
while (1)
{
// Add your application code
CLRWDT(); //сброс сторожевого таймера +++++++++++++++++++++-
SPI1TXB = 0x55; // загрузка буфера кодом
while(!SPI1STATUSbits.TXBE); // ожидать передачи данных
SPI1TXB = 0xAA; // загрузка буфера кодом
while(!SPI1STATUSbits.TXBE); // ожидать передачи данных
__delay_us(10); // сделать паузу
}
}
Суть этого примера простая сбрасывать сторожевой таймер говоря микроконтроллеру, что программа выполняется правильно, загружать в буфер SPI данные и проверить, что мы имеем на выходе CLC3 модуля….
Я использую анализатор для просмотра сигналов (при этом предварительно вывел и PWM и SDO на порты микроконтроллера.
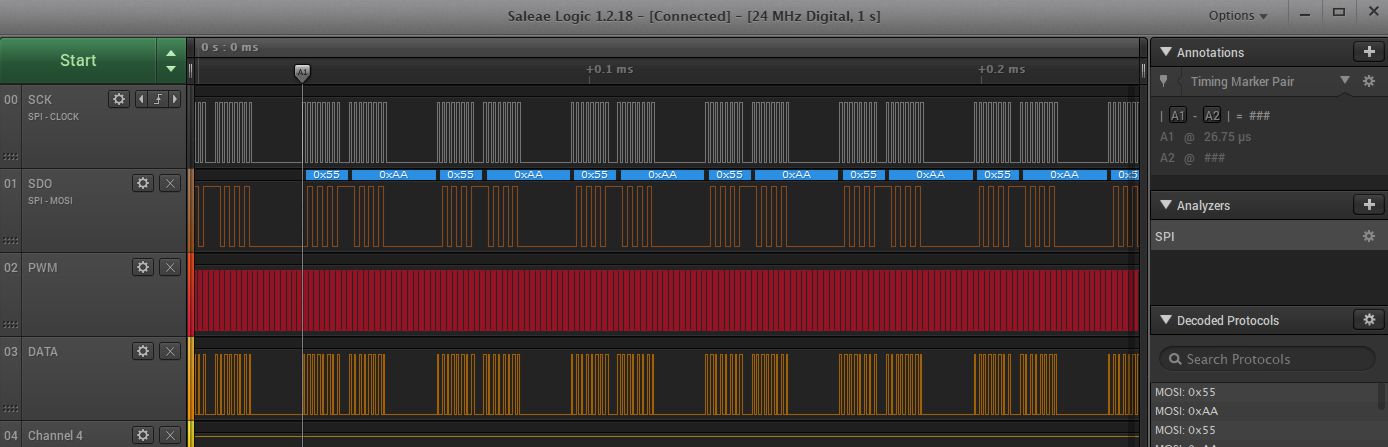
Мы видим как работает SPI, как на выходе его формируются наши передаваемые данные, в третей строке видим наш сигнал PWM, а на четвертой данные формируемые для управление светодиодами.
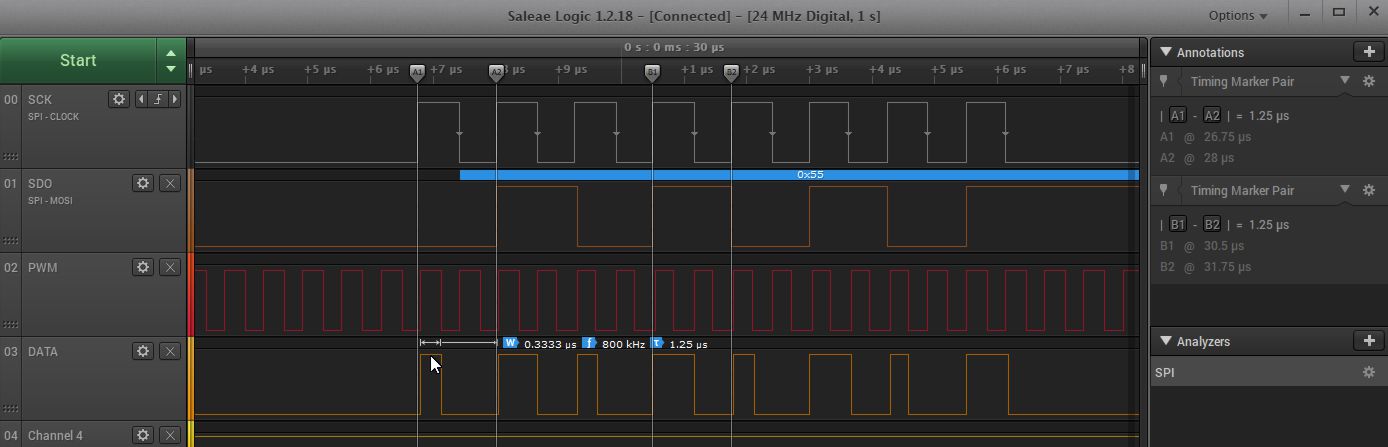
А теперь по подробнее:
Как формируется логический ноль:
как формируется логическая единица:
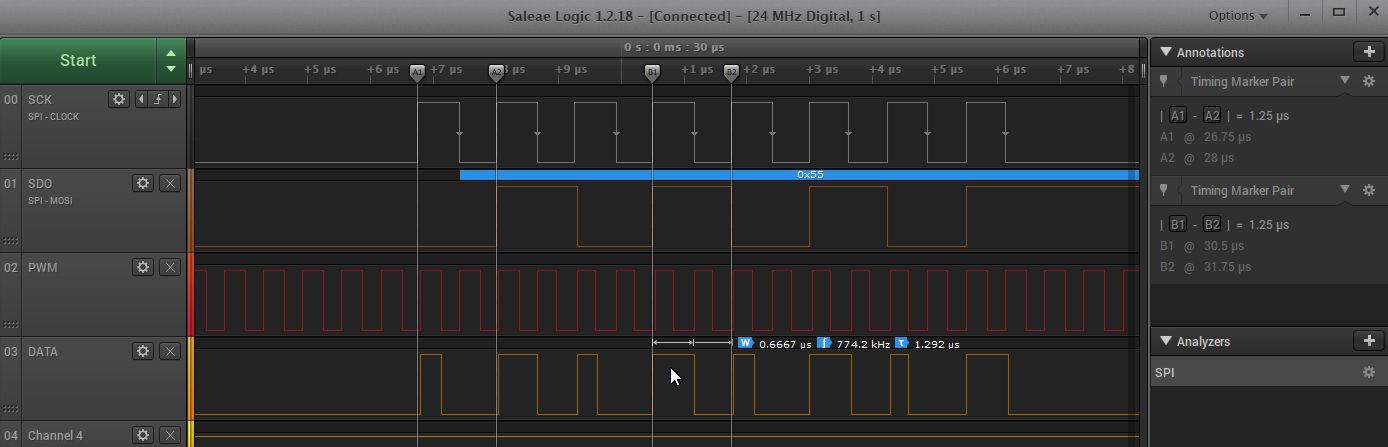
Все длительности в допуске, правда хочу сказать из практики, светики будут работать и при еще большем разбросе.
Для управления, например, 4 светодиодами напишем небольшою функцию.
/*
* где входные данные величина яркости для
* red -
* green -
* blue -
*/
void transfer_WS2812(uint8_t red, uint8_t green, uint8_t blue)
{
SPI1TXB = green;
while(!SPI1STATUSbits.TXBE);
SPI1TXB = red;
while(!SPI1STATUSbits.TXBE);
SPI1TXB = blue;
while(!SPI1STATUSbits.TXBE);
}
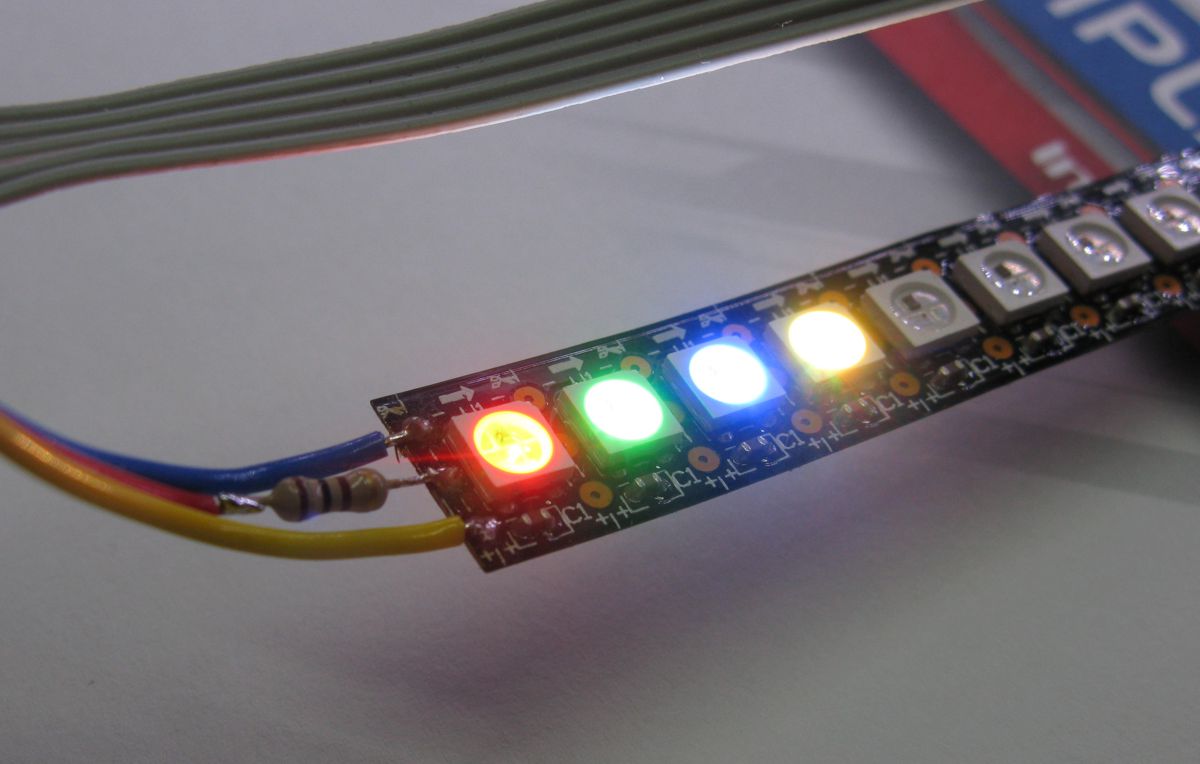
и напишем небольшую программу для передачи данных на наши 4 светика, так будут выглядеть программа в главном цикле для постоянной передачи данных в шину.
while (1)
{
// Add your application code
CLRWDT(); //сброс сторожевого таймера +++++++++++++++++++++-
__delay_us(100); // синхронизация
transfer_WS2812(255,0,0); // Красный
transfer_WS2812(0,255,0); // Зеленый
transfer_WS2812(0,0,255); // Синий
transfer_WS2812(255,255,0); // Желтый
}
На выходе мы увидим:

Проект и сканы данных в формате салае логик можно скачать. На этом все. В следующей статье расскажу как сделать полноценную библиотеку для работы со светодиодными лентами и как создавать световые эффекты!
Neopixel LED и PIC18 - демо проект 491.83 KB 117 downloads
Еще раз об управлении светодиодами на драйвере...Neopixel LED и PIC18 - сканы интерфейса 1.31 MB 108 downloads
Все длительности в допуске, правда хочу сказать...Это может быть интересно
 MCC PIC24 – модуль OUTPUT COMPARE – в режиме генератора звуковых сигналовViews: 745 При проектировании простых устройств автоматики, часто необходимо иметь механизм звукового оповещения. Самый верхний уровень, это формирование голосовых сообщений, но об этом, как то по позже… В самом примитивном …
MCC PIC24 – модуль OUTPUT COMPARE – в режиме генератора звуковых сигналовViews: 745 При проектировании простых устройств автоматики, часто необходимо иметь механизм звукового оповещения. Самый верхний уровень, это формирование голосовых сообщений, но об этом, как то по позже… В самом примитивном … Проект с использованием MCC часть 09Views: 974 Эта часть будет посвящена созданию практического проекта управления освещение. Тех задание: Два выхода управления ШИМ – светодиодным освещением. Две кнопки управления, каждая кнопка управляет, своим каналом, логика самая …
Проект с использованием MCC часть 09Views: 974 Эта часть будет посвящена созданию практического проекта управления освещение. Тех задание: Два выхода управления ШИМ – светодиодным освещением. Две кнопки управления, каждая кнопка управляет, своим каналом, логика самая … Униполярный шаговый двигатель – часть 2Views: 925 В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима. В …
Униполярный шаговый двигатель – часть 2Views: 925 В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима. В … MPLAB® Harmony – или как это просто! Часть 2.Views: 2842 Часть вторая – Первая программа на PIC32. Музыкальная тема к статье, слушаем: Для начала изучения PIC32 надо иметь или демоплату или самому её изготовить имея микроконтроллер. Начнем из …
MPLAB® Harmony – или как это просто! Часть 2.Views: 2842 Часть вторая – Первая программа на PIC32. Музыкальная тема к статье, слушаем: Для начала изучения PIC32 надо иметь или демоплату или самому её изготовить имея микроконтроллер. Начнем из … Простой оптический сенсор приближенияОптический сенсор, назначение оптический концевик, для автоматики, бесконтактный выключатель с функцией автоматического отключения...
Простой оптический сенсор приближенияОптический сенсор, назначение оптический концевик, для автоматики, бесконтактный выключатель с функцией автоматического отключения... Проект с использованием MCC часть 02Views: 2407 Когда мы запустили конфигуратор, самое главное понять, что с этим делать и как проверить, то что мы делаем работает или нет. Для начала настроим регистры конфигурации микроконтроллера и настроем …
Проект с использованием MCC часть 02Views: 2407 Когда мы запустили конфигуратор, самое главное понять, что с этим делать и как проверить, то что мы делаем работает или нет. Для начала настроим регистры конфигурации микроконтроллера и настроем … PIC18 – модуль DMAViews: 1284 Введение Модуль прямого доступа к памяти (DMA) предназначен для обслуживания передачи данных непосредственно между различными областями памяти без вмешательства процессора. Исключив при этом необходимость в интенсивной обработки …
PIC18 – модуль DMAViews: 1284 Введение Модуль прямого доступа к памяти (DMA) предназначен для обслуживания передачи данных непосредственно между различными областями памяти без вмешательства процессора. Исключив при этом необходимость в интенсивной обработки … Altium Designer my Libraries, Project templates, System settings by Catcatcat V24.0 PROViews: 424 Назвемо цей варіант поновлення для професіоналів і не тільки. Що нового? 1. Повністю змінено структуру параметрів бази даних компонента. Це дозволило повноцінної роботи Актив ВОМ. Ви відразу отримуєте …
Altium Designer my Libraries, Project templates, System settings by Catcatcat V24.0 PROViews: 424 Назвемо цей варіант поновлення для професіоналів і не тільки. Що нового? 1. Повністю змінено структуру параметрів бази даних компонента. Це дозволило повноцінної роботи Актив ВОМ. Ви відразу отримуєте … CCP – модуль в режиме Compare на примере PIC18Views: 3154 CCP – модуль можно использовать в трех режимах: Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями. Compare – позволяет …
CCP – модуль в режиме Compare на примере PIC18Views: 3154 CCP – модуль можно использовать в трех режимах: Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями. Compare – позволяет … Четырех канальный терморегулятор ch-4000Views: 3326 Четыре независимых канала регулирования температуры, одновременно можно подключить 16 датчиков температуры DS18B20 с удалением до трехсот метров. Можно для регулировки выбрать любой датчик, подключенный к устройству. Каждый канал может работать …
Четырех канальный терморегулятор ch-4000Views: 3326 Четыре независимых канала регулирования температуры, одновременно можно подключить 16 датчиков температуры DS18B20 с удалением до трехсот метров. Можно для регулировки выбрать любой датчик, подключенный к устройству. Каждый канал может работать …
Комментарии