Views: 809
В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима.
В этих библиотеках приметен метод когда данные управления шаговым двигателем собраны в массивы и в зависимости от требуемого режима используется тот или иной массив данных.
Последний режим который бы хотелось рассмотреть это полушаговый режим. В этом режиме потребление максимальное, но и мощность которую способен отдать ШД на вал также максимальна, но в нем можно использовать максимальную скорость вращения двигателем которая в предыдущих режимах недостижима. В суммарном значении из-за скорости работы общее потребление энергии может быть значительно ниже. По этой причине его рекомендуется применять на практике.
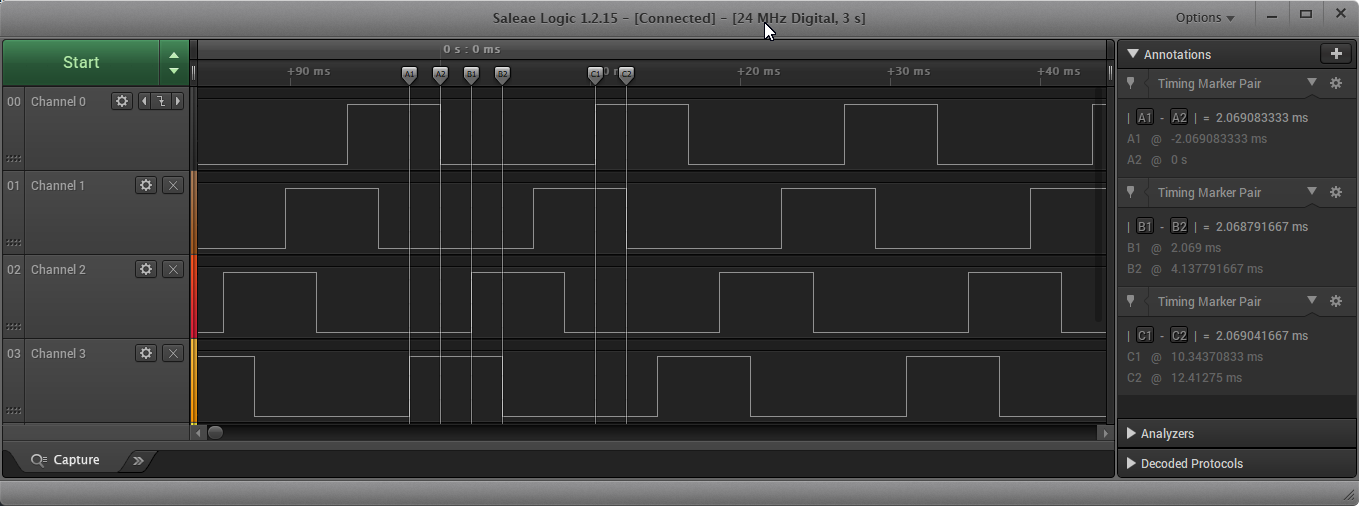
Из сканирования работы фаз шагового двигателя видно, то цикл управления фазы “как-бы” разбит на 3 части, при этом постоянно напряжение подается на один или два полюса. Это обеспечивать в такой схемотехники максимальный вращающийся момент.

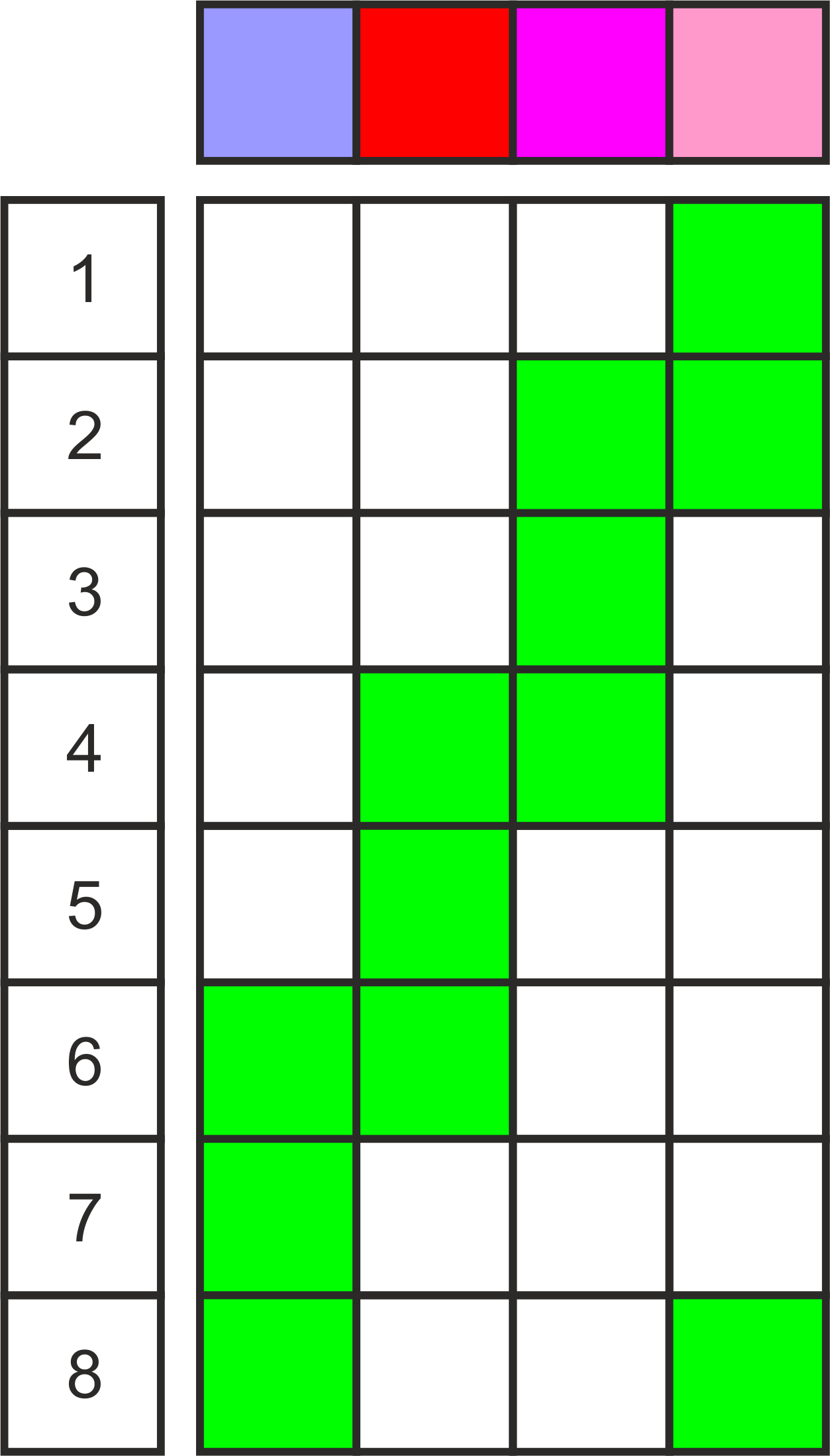
Визуально управление ШД можно представить так:
Функция работы шагового двигателя для версии 2 будет выглядеть так:
void TMR2_ISR(void)
{
uint8_t maska;
static uint8_t stepp;
//------------------------------------------------------------------------------
maska = (uint8_t)(LATC&0xF0); // загрузить текущее значение регистра и очистить биты для шагового
if(!steps)
{
LATC = maska; //
PIE4bits.TMR2IE = 0;
}
else
{
if(uprlfaz==2)
{
if(direction)
{
LATC = (uint8_t)(one_and_two_phase[stepp--]|maska); // загрузить текущее значение для управления шаговым двигателем
if(stepp==255)stepp=7;
}
else
{
LATC = (uint8_t)(one_and_two_phase[stepp++]|maska); // загрузить текущее значение для управления шаговым двигателем
if(stepp>7)stepp=0;
}
}
else if(uprlfaz==1)
{
if(direction)
{
LATC = (uint8_t)(two_phase[stepp--]|maska); // загрузить текущее значение для управления шаговым двигателем
if(stepp==255)stepp=3;
}
else
{
LATC = (uint8_t)(two_phase[stepp++]|maska); // загрузить текущее значение для управления шаговым двигателем
if(stepp>3)stepp=0;
}
}
else
{
if(direction)
{
LATC = (uint8_t)(one_phase[stepp--]|maska); // загрузить текущее значение для управления шаговым двигателем
if(stepp==255)stepp=3;
}
else
{
LATC = (uint8_t)(one_phase[stepp++]|maska); // загрузить текущее значение для управления шаговым двигателем
if(stepp>3)stepp=0;
}
}
//------------------------------------------------------------------------------
steps--; // уменьшить шаг
}
//------------------------------------------------------------------------------
// clear the TMR2 interrupt flag
PIR4bits.TMR2IF = 0;
if(TMR2_InterruptHandler)
{
TMR2_InterruptHandler();
}
}
Файлы для загрузки V2.0
Униполярный шаговый двигатель - часть 2 (v2.0) 601.69 KB 42 downloads
* Revision history: v 2.0 * работает совместно с таймером...Для компактности и эффективности все таки стоит отказаться от универсальности и использовать только алгоритм который нужен в конкретном изделии.
Компактная версия библиотеки V3.0 – в которой используется только пошаговый режим в этом режиме есть преимущество не только в мощности, но и в скорости управления режим работы. А чем выше скорость тем тише работает двигатель (ниже вибрационный шум) и естественно падает суммарная потребляемая мощность.
Файлы для загрузки V3.0
Униполярный шаговый двигатель - часть 2 (v3.0) 598.64 KB 59 downloads
* Библиотека управления шаговым двигателем *...Это может быть интересно
 Проект с использованием MCC часть 08Views: 1022 И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, …
Проект с использованием MCC часть 08Views: 1022 И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, … TDA7294 part 1Views: 237 TDA7294 має унікальні дані для створення підсилювачів звукової частоти HI-FI класу. Варіант застосування є конфігурація BRIDGE (мостова схема включення), де використовуються два TDA7294, як показано на схематичній діаграмі …
TDA7294 part 1Views: 237 TDA7294 має унікальні дані для створення підсилювачів звукової частоти HI-FI класу. Варіант застосування є конфігурація BRIDGE (мостова схема включення), де використовуються два TDA7294, як показано на схематичній діаграмі … Стабилизатор тока для светодиодов SN3350Views: 2595 SN3350 ближайший аналог ZXLD1350 Как собрать готовый вариант, читайте во второй части – http://catcatcat.d-lan.dp.ua/stabilizator-toka-na-sn3350-chast-2/ 40V драйвер светодиодов с внутренним ключом SN3350 – импульсный понижающий преобразователь, разработанный для того, чтобы эффективно управлять одним или …
Стабилизатор тока для светодиодов SN3350Views: 2595 SN3350 ближайший аналог ZXLD1350 Как собрать готовый вариант, читайте во второй части – http://catcatcat.d-lan.dp.ua/stabilizator-toka-na-sn3350-chast-2/ 40V драйвер светодиодов с внутренним ключом SN3350 – импульсный понижающий преобразователь, разработанный для того, чтобы эффективно управлять одним или … Бегущие огни (ch-bo-36)Views: 2426 Проект на PIC-микроконтроллере PIC16F648A. Количество каналов 36. Для индикации используется подключение по матрице 6х6. Расположение светодиодов в одну линию. Все эффекты написаны для возможности увеличения количества светодиодов. Рекомендуется …
Бегущие огни (ch-bo-36)Views: 2426 Проект на PIC-микроконтроллере PIC16F648A. Количество каналов 36. Для индикации используется подключение по матрице 6х6. Расположение светодиодов в одну линию. Все эффекты написаны для возможности увеличения количества светодиодов. Рекомендуется … Altium Designer – подготовка документации для производства и сборки печатных платViews: 3643 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем …
Altium Designer – подготовка документации для производства и сборки печатных платViews: 3643 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем … CLUBBEST – reasoning on the visualization of music.Views: 124 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для …
CLUBBEST – reasoning on the visualization of music.Views: 124 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для … Модуль CAN в микроконтроллерах PIC18Views: 5720 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований …
Модуль CAN в микроконтроллерах PIC18Views: 5720 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований … USB K-L-line адаптерViews: 5971 USB K-L-line адаптер предназначен для связи персонального компьютера с диагностической шиной автомобиля – интерфейс ISO-9141. Этот проект предназначен для сборки недорого устройства с использованием специально для этой цели …
USB K-L-line адаптерViews: 5971 USB K-L-line адаптер предназначен для связи персонального компьютера с диагностической шиной автомобиля – интерфейс ISO-9141. Этот проект предназначен для сборки недорого устройства с использованием специально для этой цели … The art of DJViews: 96 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is …
The art of DJViews: 96 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is … PIC18 – System ArbitrationViews: 564 Системный арбитр. Разрешает доступ к памяти между выборами уровнями системы (т.е. Main, Interrupt Service Routine) и выбором периферийных устройств (т.е. DMA и Scanner) на основе назначенных пользователем приоритетов. Каждый …
PIC18 – System ArbitrationViews: 564 Системный арбитр. Разрешает доступ к памяти между выборами уровнями системы (т.е. Main, Interrupt Service Routine) и выбором периферийных устройств (т.е. DMA и Scanner) на основе назначенных пользователем приоритетов. Каждый …