Views: 614
 При проектировании простых устройств автоматики, часто необходимо иметь механизм звукового оповещения. Самый верхний уровень, это формирование голосовых сообщений, но об этом, как то по позже… В самом примитивном варианте можно использовать буззер со встроенным генератором. В таком варианте различные состояния звуковых сообщений можно формировать длительностью сигнала. Более продвинутый уровень, это одноголосный генератор, для формирования сигналов разных частот.
При проектировании простых устройств автоматики, часто необходимо иметь механизм звукового оповещения. Самый верхний уровень, это формирование голосовых сообщений, но об этом, как то по позже… В самом примитивном варианте можно использовать буззер со встроенным генератором. В таком варианте различные состояния звуковых сообщений можно формировать длительностью сигнала. Более продвинутый уровень, это одноголосный генератор, для формирования сигналов разных частот.
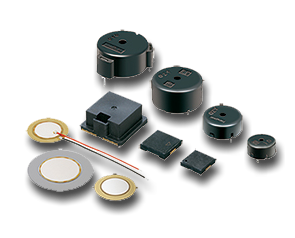
Такой способ позволят, не только формировать сигналы по длительности, но и разделять их по частоте. В этом варианте можно формировать даже простые мелодии. Для этого нам потребуется так называемые пассивные buzzer, динамик. Можно применять как механические (они более дешевые), так и пьезоэлектрические.
Внешний вид буззеров выпускаемых фирмой MURATA:
Piezoelectric Sounders / Buzzers 

Но чаще нам предстоит иметь дело с китайским производителем, так как цена и качество у них более приемлемы.

Механическими буззерами проще всего управлять, схема подключения, может иметь следующий вид:
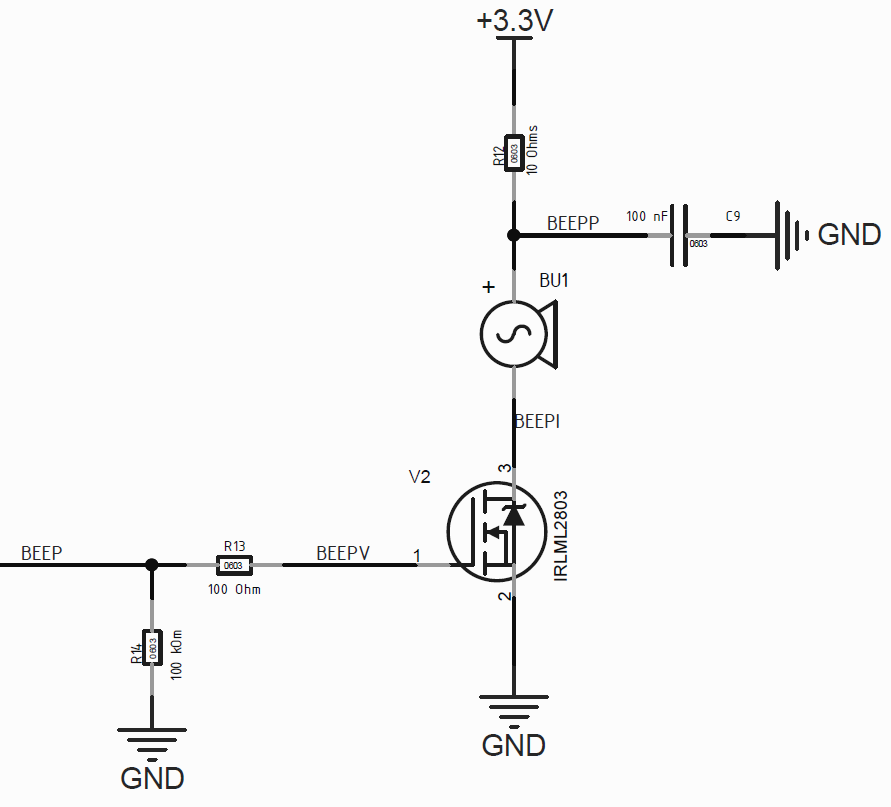
Резистор R14 предназначен для удержания транзистора в закрытом состоянии при включении устройства. R13 вместе емкостью затвора, создают фильтр низких частот, что позволяет в некоторой степени избавиться от гармоник, которые формирует меандр и придать формируемому звуку сигналу, более приятное звучание. Резистор R10 и конденсатор C9 уменьшают влияние на шину питания, работу звукового преобразователя. Для своих устройств я предпочитаю использовать пассивные буззеры типа HYG8503A или HY09.
Теперь перейдет к программной реализации. В PIC24 для создания генератора удобно использовать модули OCx. Один из вариантов настройки рассмотрим в нашем варианте с использованием MCC.
В начале все просто добавляем в проект модуль (любой который свободен) например, в моем варианте это был OC4. Выполним конфигурацию:
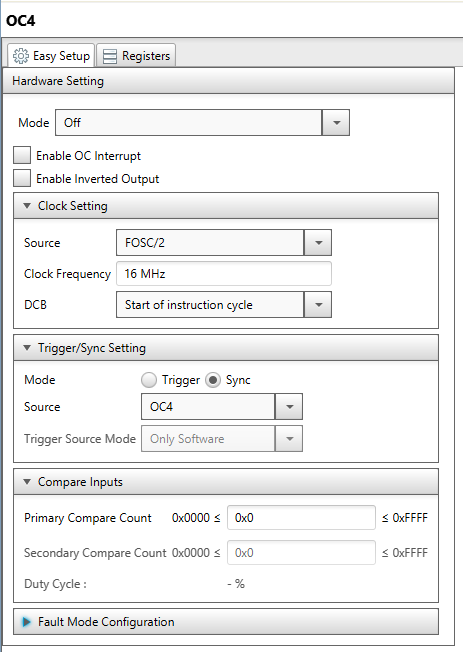
Тут очень просто, не нужен нам какой то режим, оставим OFF. Выберем источник FOSC/2. Настройки режима синхронизации, выберем сам модуль, т.е. при запуске модуля он будет сам себя потом запускать и будет нам, генерировать заданную нами частоту.
Для формирования звука нам потребуется создать функцию и описать частоты нот для формирования звуков. Частоты нот, можно легко найти при поиске в инете. Для себя я составил следующие определения констант для нот:
// константы для OC модуля для формирования частот #define Do 23888 // До #define Do_d 22548 // До-диез #define Re 21283 // Ре #define Re_d 20088 // Ре-диез #define Mi 18960 // Ми #define Fa 17896 // Фа #define Fa_d 16892 // Фа-диез #define Sol 15943 // Соль #define So_d 15049 // Соль-диез #define Ly 14204 // Ля #define Ly_d 13407 // Ля-диез #define Si 12654 // Си // коэффициенты для переключения октав #define okt_bol 32 // Большая октава #define okt_mal 16 // Малая октава #define okt_1 8 // 1 октава #define okt_2 4 // 2 октава #define okt_3 2 // 3 октава #define okt_4 1 // 4 октава
Для “извлечения звуков” создадим простую функцию:
//------------------------------------------------------------------------------
void beep_n (uint32_t nota, uint8_t oktav, uint8_t dlit) // формирование сигнала
{
uint16_t dlitel; // вспомог. переменная
uint32_t frequency = (uint32_t)(nota*oktav*(FCY/2000000));
ClrWdt(); // сброс сторожевого таймера
if(!dlit) dlit=1;
dlitel=500/dlit; //
OCxRS = frequency/16; // задаем период
OCxR = OCxRS/2; // половина периода
OCxTMR = 0; //
OCxCON1_OCM = 6; // включить модуль
OCxCON2_TRIGSTAT = 1;
ClrWdt(); // сброс сторожевого таймера
__delay_ms(dlitel); //
OCxCON1_OCM = 0; // выключить модуль
__delay_ms(10); //
}
//------------------------------------------------------------------------------
Функция beep_n формирует звуковой сигнал частотой nota, которая расположена в октаве oktav и длительностью dlit.
Частота которая будут загружаться в регистры модуля OCx предварительно вычисляется при инициализации переменной
uint32_t frequency = (uint32_t)(nota*oktav*(FCY/2000000));
Принцип прост, в регистр который отвечает за период работы OCx, загружаем частоту
OCxRS = frequency/16; // задаем период
А в регистр длительности импульса значение равное половине, чтобы формировать меандр
OCxR = OCxRS/2; // половина периода
Значение регистров в функции описаны как:
//------------------------------------------------------------------------------ // конфигурирование библиотеке на основании выбранного модуля OCx #define OCxRS OC4RS #define OCxR OC4R #define OCxTMR OC4TMR #define OCxCON1_OCM OC4CON1bits.OCM #define OCxCON2_TRIGSTAT OC4CON2bits.TRIGSTAT //------------------------------------------------------------------------------
Тут вы видите, что выполнено настройка под модуль OC4, если вы будете использовать другой модуль, циферку “4” надо заменить на циферку используемого модуля ;)
Библиотека для XC16 v1.35
MCC PIC24 - модуль OUTPUT COMPARE - режиме генератора звуковых сигналов 1.93 KB 6 downloads
При проектировании простых устройств автоматики,...Это может быть интересно
 Дисплей KD035C-3A подключение и управлениеViews: 698 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение …
Дисплей KD035C-3A подключение и управлениеViews: 698 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение … Цифровой спидометр для автомобиляViews: 10151 Универсальность печатной платы ch-c0030pcb позволяет создавать на её основе разнообразные устройства. Одним из таких устройств является электронный спидометр для автомобиля, в котором можно задать два компаратора скорости, например, для …
Цифровой спидометр для автомобиляViews: 10151 Универсальность печатной платы ch-c0030pcb позволяет создавать на её основе разнообразные устройства. Одним из таких устройств является электронный спидометр для автомобиля, в котором можно задать два компаратора скорости, например, для … Проект с использованием MCC часть 16Views: 1076 Продолжим изучение EUSART. На этом этапе отработает передачи данных с ПК и получения эха. Для этого в основной цикл программы добавим код if(EUSART_DataReady) // проверим флаг готовности данных …
Проект с использованием MCC часть 16Views: 1076 Продолжим изучение EUSART. На этом этапе отработает передачи данных с ПК и получения эха. Для этого в основной цикл программы добавим код if(EUSART_DataReady) // проверим флаг готовности данных … Development board based on MCU PIC18F47Q84Views: 910 PIC18F47Q84 Microcontroller Family with CAN Flexible Data Status: In Production.
Development board based on MCU PIC18F47Q84Views: 910 PIC18F47Q84 Microcontroller Family with CAN Flexible Data Status: In Production.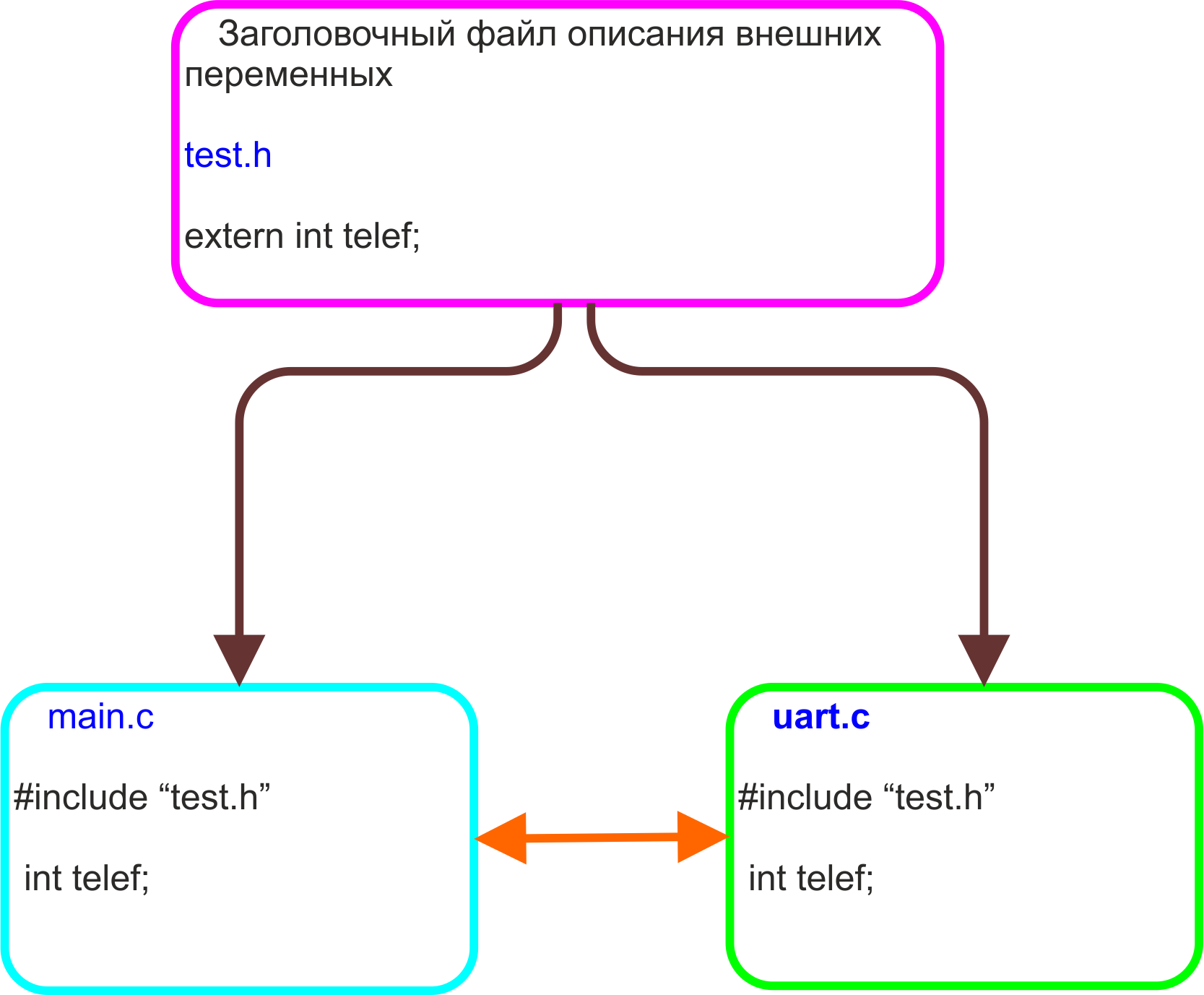 Просто о внешних переменныхViews: 785 Часто возникает задача когда необходимо предавать данные между модулями программы. Например, передать данные между файлами, или управлять работой модулей. Для этого создаем заголовочный файл и описываем наши переменные как …
Просто о внешних переменныхViews: 785 Часто возникает задача когда необходимо предавать данные между модулями программы. Например, передать данные между файлами, или управлять работой модулей. Для этого создаем заголовочный файл и описываем наши переменные как … Altium Designer my Libraries, Project templates, System settings by Catcatcat V23.04Views: 205 Смотри как установить и подключить библиотеку тут. V. – 23_04 – Component Database Update. – configuration file name – DXPPreferences1.DXPPrf. – Added two projects for audio amplifier …
Altium Designer my Libraries, Project templates, System settings by Catcatcat V23.04Views: 205 Смотри как установить и подключить библиотеку тут. V. – 23_04 – Component Database Update. – configuration file name – DXPPreferences1.DXPPrf. – Added two projects for audio amplifier … Униполярный шаговый двигатель – часть 2Views: 809 В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима. В …
Униполярный шаговый двигатель – часть 2Views: 809 В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима. В … Проект с использованием MCC часть 12-1Views: 938 В настоящее время без визуализации информации уже не интересно. Поэтому научимся выводить информацию на дисплей. Для это возьмет простенький OLED RET012864E/REX012864J я такой приобретал в фирме “Гамма-Украина”, описание можно …
Проект с использованием MCC часть 12-1Views: 938 В настоящее время без визуализации информации уже не интересно. Поэтому научимся выводить информацию на дисплей. Для это возьмет простенький OLED RET012864E/REX012864J я такой приобретал в фирме “Гамма-Украина”, описание можно … HVLD модуль на примере PIC24FJ128GA204Views: 633 HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что …
HVLD модуль на примере PIC24FJ128GA204Views: 633 HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что … MPLAB® Code Configurator and EncoderViews: 1417 Еще раз про энкодер… Для некоторых приложений очень удобно и экономически выгодно, для настройки и управления использовать энкодер. Такие энкодеры имеют строенную тактовую кнопку которую можно применить для выбора …
MPLAB® Code Configurator and EncoderViews: 1417 Еще раз про энкодер… Для некоторых приложений очень удобно и экономически выгодно, для настройки и управления использовать энкодер. Такие энкодеры имеют строенную тактовую кнопку которую можно применить для выбора …