
Views: 498
Дистанционное управление для устройств на микроконтроллерах.
Самый простой вариант это приобрести понравившийся пульт ДУ на ИК и сделать дистанционное управление.
Для этого необходим приемник ИК, желательно выбирать с чтобы совпадала частота несущей, но если даже у вас есть в наличии на 38, а руль с несущей на 38 кГц, все равно работать будет, просто уменьшиться дальность, например при всех идеальных условиях можно управлять с расстоянии более 60 метров, а при всех неблагоприятных не более 10-15.
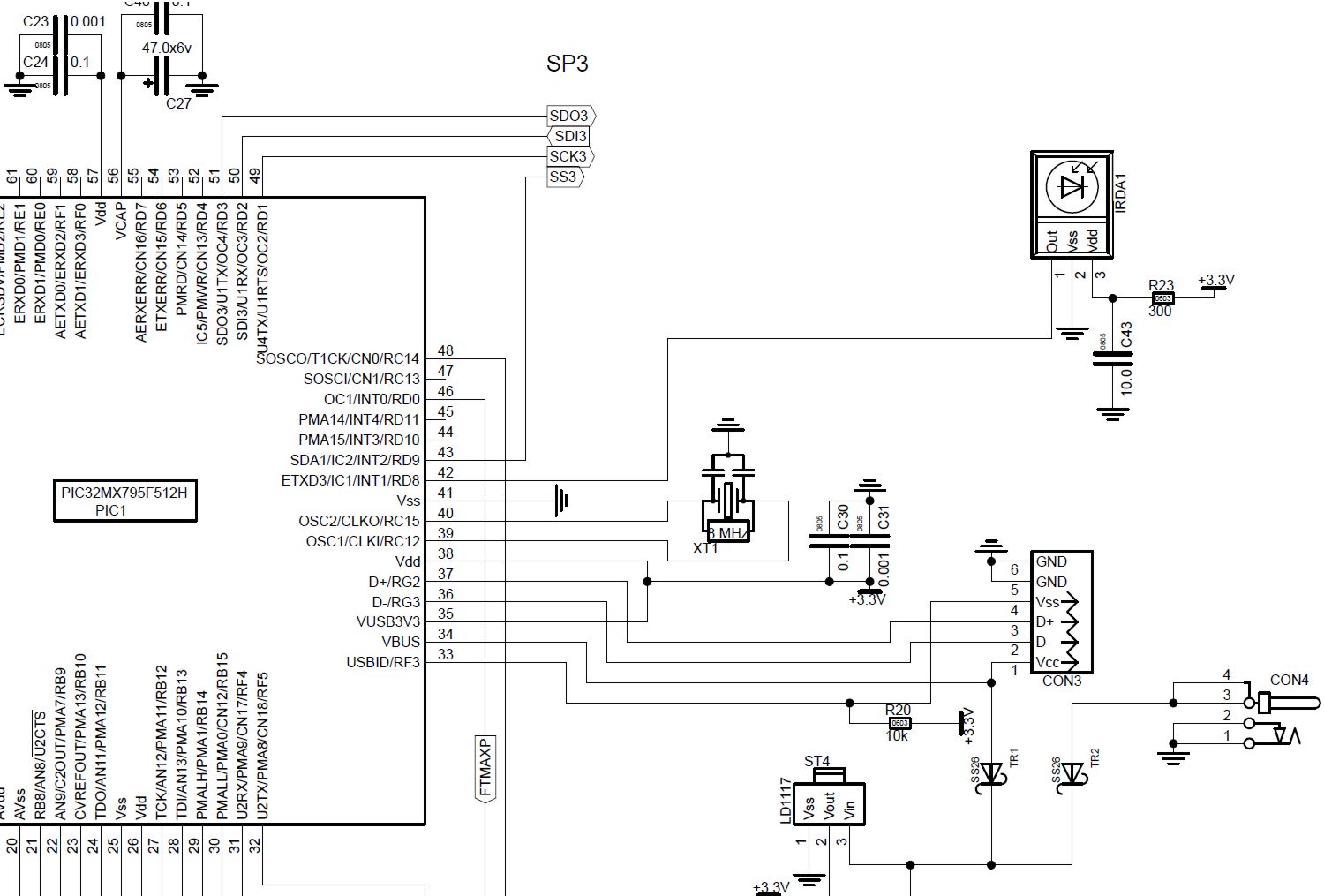
Для декодирования сигналов мы подключаем приемник на прямую на вход INT1 микроконтроллера
И как только это сделано, надо в программу добавить функции обработки. Для обработки мы будем использовать коды типа NEC
это стандартные коды несущие 32 бита данных.
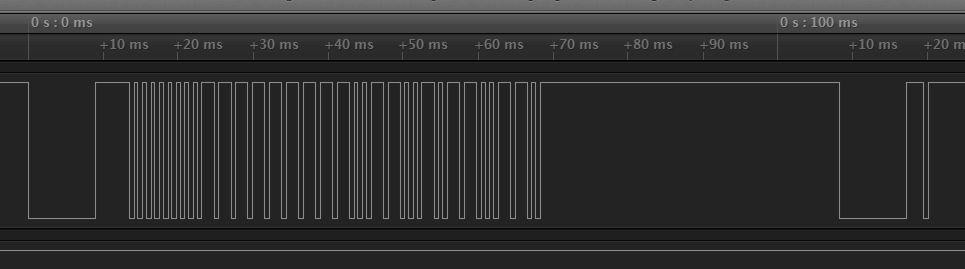
Принцип работы будет следующий мы используем свойство микроконтроллера для обработки внешних прерываний по входам. Используем вход INT1 и настраиваем, чтобы он формировал прерывания по срезу импульсов. Т.е. в приемниках всегда есть подтяжка (30-50 кОм) и пассивный уровень высокий, при получении модулированного импульса на выходе же формируется низкий уровень. Нам необходимо в момент получения от входа прерывания сосчитать данные с таймера (затем таймер обнулить для подготовки изменения следующего импульса) проверить длительность и по параметрам этой длительности определить это преамбула (начала передачи) или это передача бита ноль, единицы или это код автоповтора (удержание клавиши).
Принцип описан, теперь настройка:
// Настройка прерывания по входу INT1 – External Interrupt 1, вход RD8, ДУ - ИК
INTCONbits.INT1EP = 0; // External Interrupt 1 Edge Polarity Control bit 0 = Falling edge
IPC1bits.INT1IP = 7; // уровень приоритета
IPC1bits.INT1IS = 1; // уровень суб приоритета
IFS0bits.INT1IF = 0; // сбросить флаг прерывания по входу INT1
IEC0bits.INT1IE = 1; // разрешить прерывание по входу INT1
Далее необходимо настроить таймер, он же измеряет время, хочу уточнить, все параметры приведены для тактовой 80 МГц, она же и поступает на периферийные устройства микроконтроллера, и от нее и тактируется таймер.
Настройка таймера
// Настройка таймера Т4 для измерение длительности
T4CON = 0x0; //
PR4 = 0xFFFF; // 6250-200 Гц настройка периода - тактирование
T4CONbits.TCKPS = 0b110; // 111 = 1:256 prescale value
T4CONbits.ON = 1; // включить
// Настройка для таймера 4 прерывания
IPC4bits.T4IP=5; // приоритет 5
IPC4bits.T4IS=3; // суб приоритет уровень 3
IFS0bits.T4IF=0; // сбросить флаг прерывания.
IEC0bits.T4IE=1; // разрешить прерывания от Т1
Самое главное по приоритету, прерывания по входу INT1 должны иметь наивысший приоритет!
Далее программе мы должны включить прерывания и включить мультивекторный режим
// настройка прерываний
INTCONbits.MVEC=1; // включить мульти векторный режим
__builtin_enable_interrupts(); // разрешить прерывания
Теперь вернемся в начало и опишем переменные и флаги управления, это необходимо понимать как функции прерывания будут возвращать в основную программу полученные коды (команды).
// переменные флаги модуля управления с ДУ
// флаги ДУ
volatile struct
{
unsigned NACH : 1; // флаг ожидания ИК команды, устанавливается по переполнению таймера
unsigned POV : 1; // флаг ожидания кодов автоповтора, после приема команды
unsigned PRIEM : 1; // флаг данные готовы, устанавливается когда ИК команда принята
unsigned AUPOV : 1; // флаг автоповтор, удержание клавиши на пульте
}flagIK;
unsigned long chetchic; // счетчик полученных бит
unsigned long data_IK; // код полученной команды, действителен после установки флага PRIEM
unsigned long timeautIK; // таймер установки времени после которого разрешено подача следующей команды
надеюсь с комментов все понятно.
И сами функции прерываний, обработка построена самой возможной простотой и вариантом некоторой степени помехозащищенности, от ИК помех.
Обработка и получение данных
#define CLOBIT 32 // количество бит в передаче
// обработка прерывания по входу INT1
void __ISR(7,ipl7srs) INT1Interrupt (void)
{
unsigned long pwm_reg;
pwm_reg = TMR4; // загрузить значение длительности
TMR4=0; // обнулить таймер
if(pwm_reg>16750&&pwm_reg<17000&&flagIK.NACH) // передача синхроимпульса должна сопровождаться переполнением таймера
{
chetchic=CLOBIT; //счетчик бит (3 байта 8*3=24)
flagIK.NACH=0;
}
else
if (pwm_reg>13750&&pwm_reg<15000&&flagIK.POV) // передача "бита автоповтора"
{
timeautIK=5; // инициализация таймера таймаута
LATBINV = 0b0001000000000000; // мигание светодиода - индикатор для тестирования
flagIK.AUPOV=1; // флаг получение кода автоповтора
}
else
if (pwm_reg>2625&&pwm_reg<2875&&chetchic>0) // передача "1"
{
data_IK<<=1; // выполнить сдвиг
data_IK |= 1; // установить единицу
chetchic--; // подсчет принятых бит
if(!chetchic){flagIK.PRIEM=1;flagIK.POV=1;} // 32 установить флаг команда принята если переданы все 32 бита
}
else
if (pwm_reg>1250&&pwm_reg<1500&&chetchic>0) // передача "0"
{
data_IK<<=1; // выполнить сдвиг (подразумевается запись 0)
chetchic--; //подсчет принятых бит
if(!chetchic){flagIK.PRIEM=1;flagIK.POV=1;} // установить флаг команда принята если переданы все 32 бита
}
else // помеха
{
flagIK.NACH=1; //
chetchic=0; //
}
IFS0bits.INT1IF = 0; // сбросить флаг прерывания по входу INT1
}
Вкратце, “получаем” прерывание, считываем значение из таймера и обнуляем его, пусть меряет следующий импульс. Полученную длительность сравниваем с 4-мя вариантами допусков и в зависимости от того куда эта длительность просочилась, делаем соответствующие тело движения.
Обработка прерывания от таймер, тут необходимая функция это помехозащищенность, он дает разрешение на по таймАУТУ на прием следующей команды и также сбрасывает прием если при приеме не поступило 32 бита.
// обработка прерывание от таймера 4
void __ISR(16,ipl5soft) T4Interrupt (void)
{
if(--timeautIK==0)flagIK.NACH=1; // установит флаг готовноть приема IK команды
chetchic=0; // обнулить счетчик
LATBCLR = 0b0001000000000000; // сбросить флаг индикации
flagIK.AUPOV=0; // флаг получение кода автоповтора
IFS0bits.T4IF=0; // сбросить флаг прерывания.
}
Теперь, что делать в основной программе? В основной программе надо ждать установки флага flagIK.PRIEM=1, если флаг установлен произвести обработка данных помещенных в переменную data_IK. И не забыть сбросить флаг, для приема следующей команды. Также можно использовать флаг flagIK.AUPOV=1, для контроля удержания клавиши ил функции автопостора, например
if(flagIK.PRIEM)
{
flagIK.PRIEM=0;
OledCursor (0, 50);
bin_HEX(data_IK);
}
в этом примере выводим на дисплей код полученной команды.
Информация по ИК – кодам некоторых производителей
CCP модуль для декодирования ИК-кодов пультов ДУ - сводная таблица по кодам. 1.95 MB 82 downloads
CCP модуль для декодирования ИК-кодов пультов...Это может быть интересно
 CAN – Controller Area NetworkViews: 1267 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, …
CAN – Controller Area NetworkViews: 1267 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, … ch-4050 – дифференциальный терморегуляторViews: 2087 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя …
ch-4050 – дифференциальный терморегуляторViews: 2087 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя … Acquaintance with audio-bluetooth modules F-6888 (BK3254).Views: 2442 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, …
Acquaintance with audio-bluetooth modules F-6888 (BK3254).Views: 2442 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, … Customs codes for exportViews: 388 Митні коди (HS Code) для надсилання посилок за кордон. Для відправки товару за кордон на сьогодні необхідно зазначати митні коди. Часто визначення коду займає багато часу. Для …
Customs codes for exportViews: 388 Митні коди (HS Code) для надсилання посилок за кордон. Для відправки товару за кордон на сьогодні необхідно зазначати митні коди. Часто визначення коду займає багато часу. Для … Проект с использованием MCC часть 12-1Views: 1145 В настоящее время без визуализации информации уже не интересно. Поэтому научимся выводить информацию на дисплей. Для это возьмет простенький OLED RET012864E/REX012864J я такой приобретал в фирме “Гамма-Украина”, описание можно …
Проект с использованием MCC часть 12-1Views: 1145 В настоящее время без визуализации информации уже не интересно. Поэтому научимся выводить информацию на дисплей. Для это возьмет простенький OLED RET012864E/REX012864J я такой приобретал в фирме “Гамма-Украина”, описание можно … MCC PIC24 – модуль OUTPUT COMPARE – режиме ШИМViews: 1312 Во многих системах управления, для формирования управляющих сигналов требуется модуль ШИМ, он позволяет не только формировать импульсы заданной длительности, но и с применением обычного RC фильтра строить простые …
MCC PIC24 – модуль OUTPUT COMPARE – режиме ШИМViews: 1312 Во многих системах управления, для формирования управляющих сигналов требуется модуль ШИМ, он позволяет не только формировать импульсы заданной длительности, но и с применением обычного RC фильтра строить простые … Светодиоды со встроенным драйвером WS2812BViews: 1091 Производитель http://www.world-semi.com Краткое описание продукции фирмы Каталог продукции” catcatcat_ws_19 catcatcat_ws_15 catcatcat_ws_11 catcatcat_ws_07 catcatcat_ws_03 catcatcat_ws_18 catcatcat_ws_14 catcatcat_ws_10 catcatcat_ws_06 catcatcat_ws_02 catcatcat_ws_05 catcatcat_ws_09 catcatcat_ws_13 catcatcat_ws_17 catcatcat_ws_16 catcatcat_ws_12 catcatcat_ws_08 catcatcat_ws_04 catcatcat_ws_01 This jQuery …
Светодиоды со встроенным драйвером WS2812BViews: 1091 Производитель http://www.world-semi.com Краткое описание продукции фирмы Каталог продукции” catcatcat_ws_19 catcatcat_ws_15 catcatcat_ws_11 catcatcat_ws_07 catcatcat_ws_03 catcatcat_ws_18 catcatcat_ws_14 catcatcat_ws_10 catcatcat_ws_06 catcatcat_ws_02 catcatcat_ws_05 catcatcat_ws_09 catcatcat_ws_13 catcatcat_ws_17 catcatcat_ws_16 catcatcat_ws_12 catcatcat_ws_08 catcatcat_ws_04 catcatcat_ws_01 This jQuery … OLED RET012864E/REX012864JViews: 1611 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как …
OLED RET012864E/REX012864JViews: 1611 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как …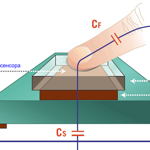 Емкостной сенсорViews: 3249 Изучаем изготовление емкостных сенсоров на PIC-микроконтроллере. Конструкция емкостных сенсоров имеет вид: Емкостные сенсоры строятся по схеме высокочастотного генератора, сам принцип основан на измерение частоты этого генератора. Частота зависит …
Емкостной сенсорViews: 3249 Изучаем изготовление емкостных сенсоров на PIC-микроконтроллере. Конструкция емкостных сенсоров имеет вид: Емкостные сенсоры строятся по схеме высокочастотного генератора, сам принцип основан на измерение частоты этого генератора. Частота зависит … MTouch® Модуль Емкостной Библиотеки для MPLAB®X Code Configurator (MCC)Views: 1448 Введение MTouch ® Модуль Емкостной Библиотеки для MPLAB ® X Code Configurator (MCC) позволяет быстро и легко генерировать решение кода на Cи для емкостной сенсорной кнопки, датчика приближения и слайдера.
MTouch® Модуль Емкостной Библиотеки для MPLAB®X Code Configurator (MCC)Views: 1448 Введение MTouch ® Модуль Емкостной Библиотеки для MPLAB ® X Code Configurator (MCC) позволяет быстро и легко генерировать решение кода на Cи для емкостной сенсорной кнопки, датчика приближения и слайдера.