Views: 2036
 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя датчиками.
ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя датчиками.
Теперь на тоже плате вы можете иметь уже три вида регулятора, на обогрев, на охлаждение и дифференциальный.
Эта функция предназначена для управления системами подогрева воды основанного на солнечных коллекторах (или для систем вентиляции, подачи свежего воздуха). Упрощенно суть работы таких систем основан на изменении температуры теплоносителя в районе солнечного коллектора и температуры подогреваемой воды в накопительной емкости, если температура в коллекторе выше заданного порога на заданную величину чем температура в накопительной емкости включается насос, который включает циркуляцию теплоносителя. При уменьшении разности ниже заданного уровня насос отключается.
Если контроллер обнаружил аварию, то работа регуляторов блокируется. Для просмотра последней аварии нажмите клавишу “2”, Для сброса аварии и возобновления работы, нажмите клавишу “2” и удерживайте её более 5 секунд. при отсутствии аварии (которая блокирует работу регуляторов) после нажатия на клавишу “2” будет сообщение “noAL“.
Предусмотрен следующий контроль, контроллер запоминает последнюю аварию
“Er-L” – обрыв линии связи с датчиками температуры.
“FrdA” – сбой данных в памяти контроллера.
“E-nn” – Авария датчика температуры, где nn – номер датчика.
“noAL” – нет аварий.
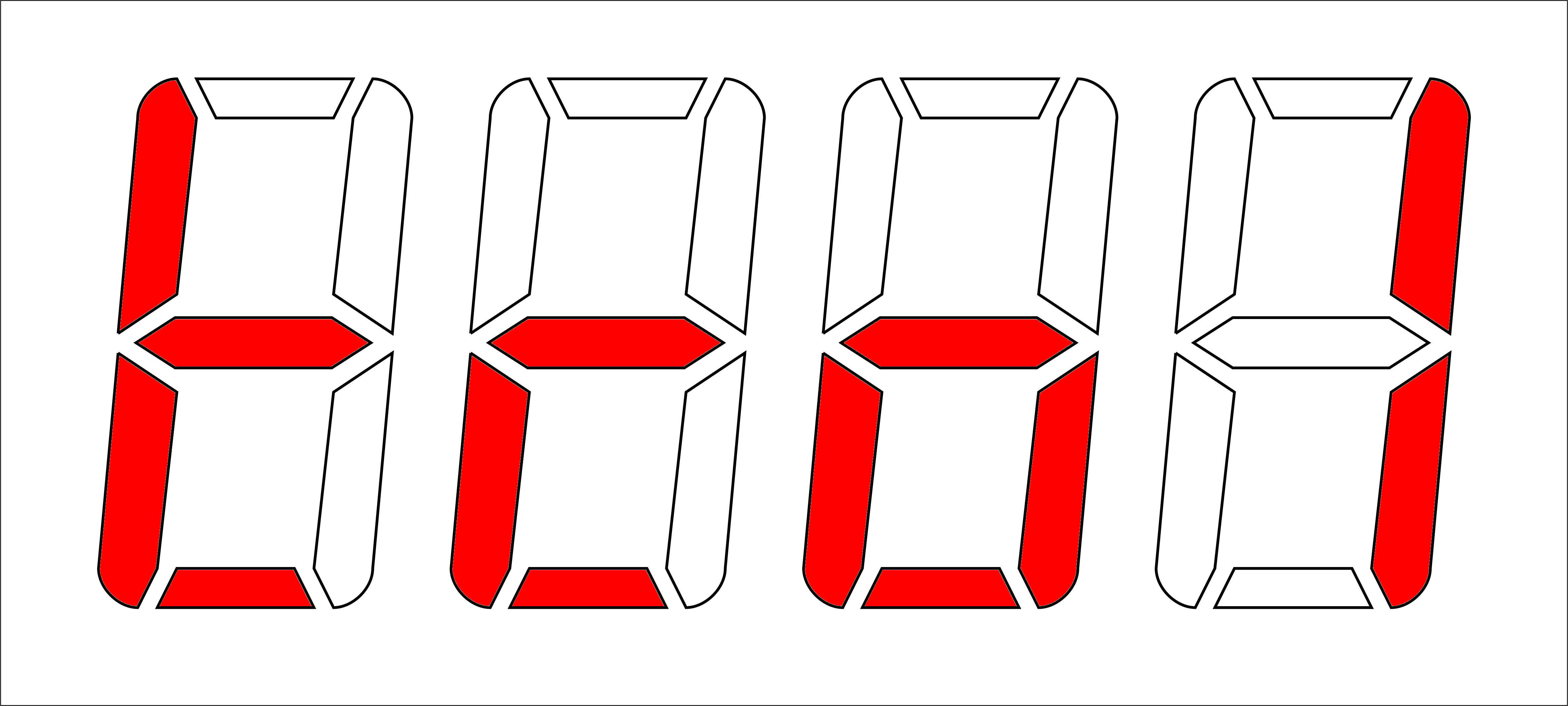
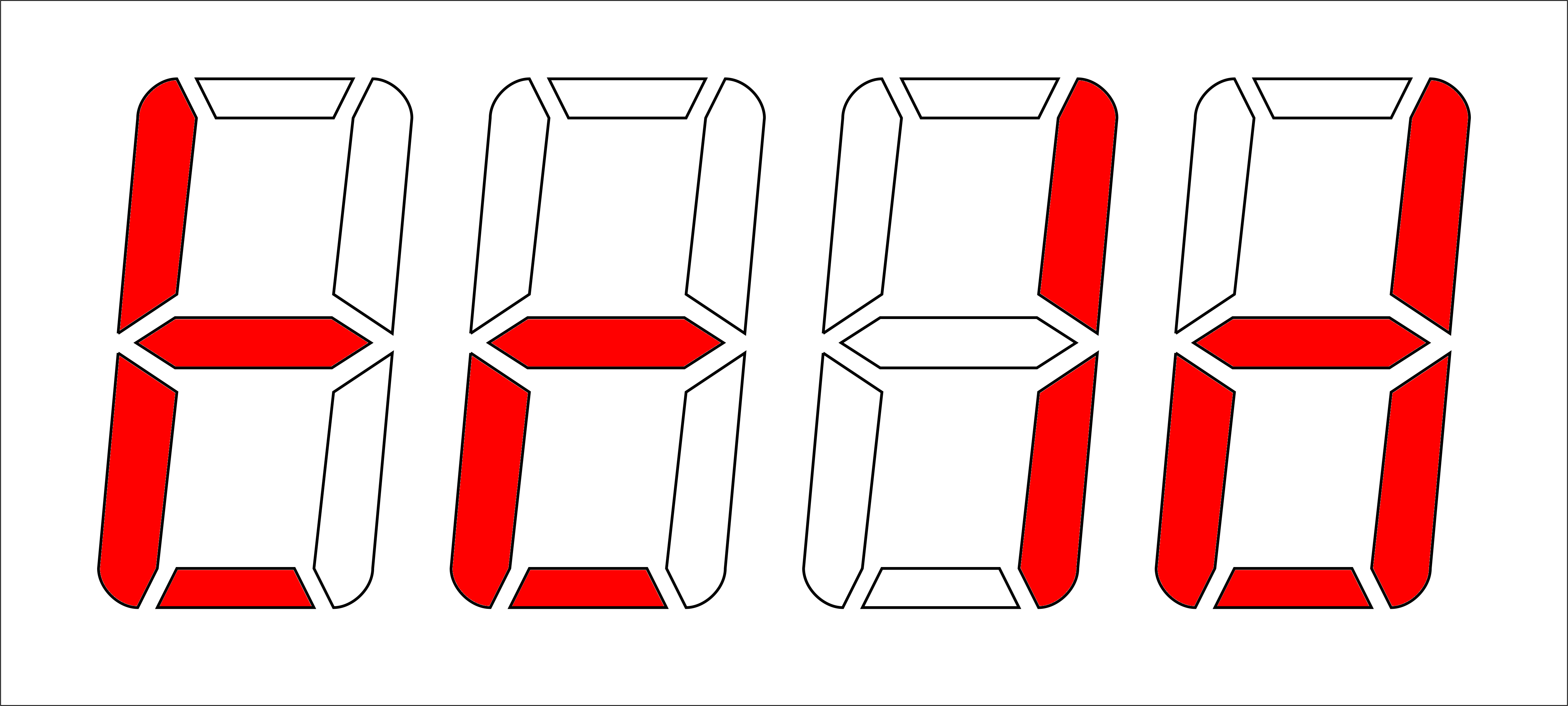
На картинке представлен принцип работы регулятора в дифференциальном режиме
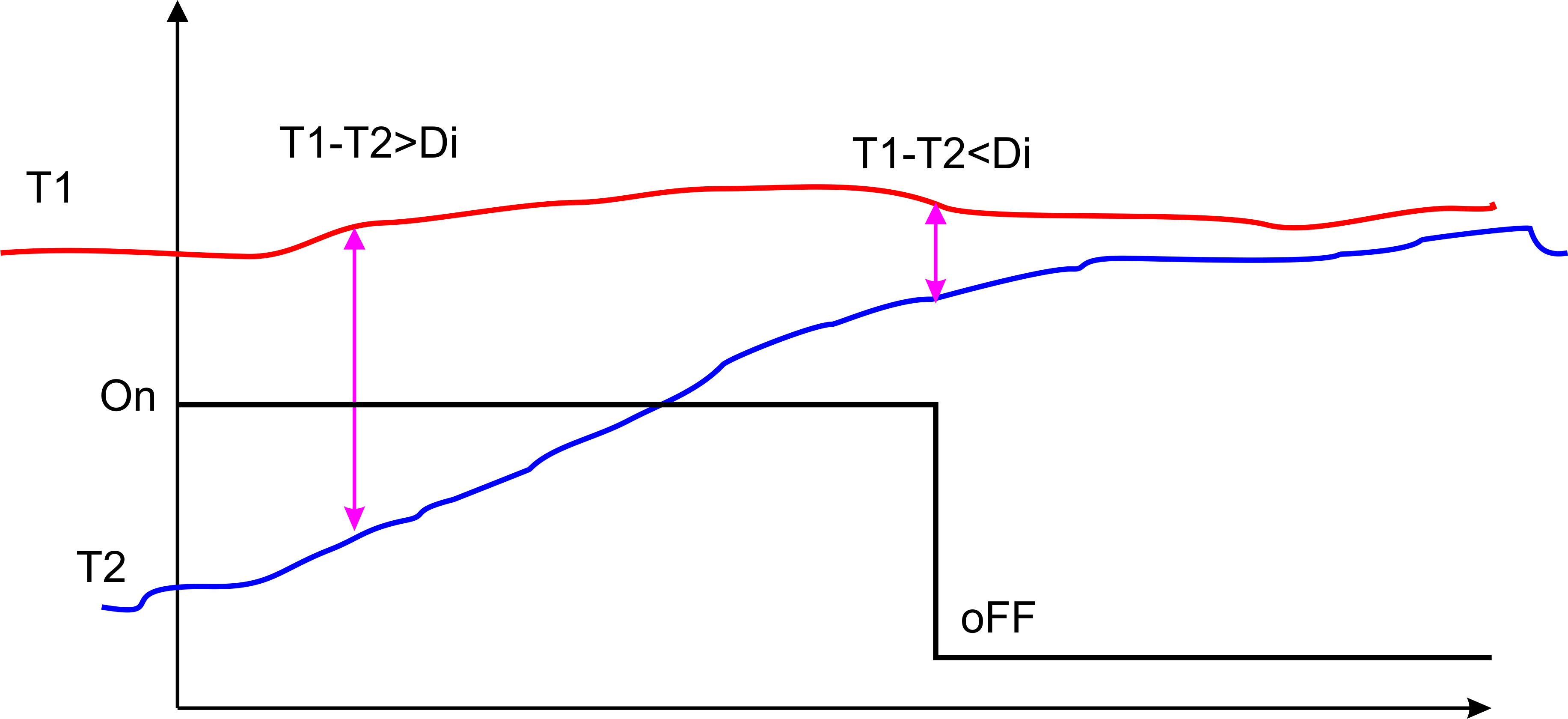
где Т1 – “горячий датчик”, Т2 – холодный датчик. Если разность температур между Т1 и Т2 выше заданного значения насос включен, если ниже выключен.
На самом деле еще при настройки необходимо учитывать параметр гистерезиса, он предназначен для устранения хаотичного включения и выключения насоса в момент перехода через установленный дифференциал. Т.е. Для настройки регулятора задается 1 разность температур, например Di=3 грд Цельсия. Для устранения “дрожания” выберем гистерезис G = 1 градус. При разности Di+G = 4 градуса произойдет включение насоса, а при величине Di-G = 2 грд, произойдет выключение.
Для настройки дифференциального регулятора необходимо в функции регулятора (2 уровень функций) функция
и выбрать функцию

после этого необходимо выбрать датчики, которые будут контролировать температуру. Для этого на уровне U2, необходимо установить точки контроля “горячий датчик” , функция (для регулятора 1, соответственно для регулятора 2 – tcon2 и т.д.)
Для выбора “холодного датчика” – функция
Т.е. в этой версии каждый регулятор может быть в режиме дифференциального связан с двумя датчиками которые установлены на шине.
Далее вся также как и для обычного регулирования, задать разность температур, задать гистерезис и дифференциальный регулятор готов к работе.
Все остальные функции, аналогичны как в универсальном терморегуляторе ch-4000.
Еще одно удобство универсальности. Теперь можно построить на маленькой плате ch-4000 не только систему для солнечного коллектора, а совместить и с системой отопления.
Для этого регулятор 1 с датчиками Т1 и Т2 навастриваем как дифференциальный для работы с солнечным коллектором, а регулятор 2 для управление отоплением помещения. И еще в запасе остается 2 регулятора для дополнительных функций.
Дополнительную информацию смотрите Четырех канальный терморегулятор ch-4000
Файлы для проекта
ch-4050 - дифференциальный регулятор - прошивка 13.36 KB 86 downloads
ch-4050 - дифференциальный регулятор - прошивка...Это может быть интересно
 Часы + Календарь + Термометр + …Views: 2765 Часы + Календарь + Термометр + Индикатор влажности + Секундомер + Дистанционное управление на ИК лучах (пульты на RC-5 протоколе) + Автоматическая регулировка яркости + Возможность вывода данных через USB, …
Часы + Календарь + Термометр + …Views: 2765 Часы + Календарь + Термометр + Индикатор влажности + Секундомер + Дистанционное управление на ИК лучах (пульты на RC-5 протоколе) + Автоматическая регулировка яркости + Возможность вывода данных через USB, … Trimax – кодирование и декодирование ИК-командViews: 2400 Первое, что надо понять назначение кнопок клавиш пульта, а также, что за кодирование реализовано в ИК- пульте. Для назначения клавиш обратимся к описанию, а для взлома кодирования воспользуемся …
Trimax – кодирование и декодирование ИК-командViews: 2400 Первое, что надо понять назначение кнопок клавиш пульта, а также, что за кодирование реализовано в ИК- пульте. Для назначения клавиш обратимся к описанию, а для взлома кодирования воспользуемся … LED модуль P10C4V12Views: 3280 LED панели на обычных регистрах типа 74HC595. Они выпускаются как монохромные так двух и полно цветные, особенность, что они предназначены для текстовой информации и имеют один уровень яркости. Общую яркость …
LED модуль P10C4V12Views: 3280 LED панели на обычных регистрах типа 74HC595. Они выпускаются как монохромные так двух и полно цветные, особенность, что они предназначены для текстовой информации и имеют один уровень яркости. Общую яркость … Обновление ESP8266 c ESPFlashDownloadTool_v3.6.3Views: 3644 Технология обновления следующая: Загружаем программу со страницы espressif.com. Разархивируем. Где находятся файлы, для прошивки? Заходим в каталоги Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка). Запускаем программу, …
Обновление ESP8266 c ESPFlashDownloadTool_v3.6.3Views: 3644 Технология обновления следующая: Загружаем программу со страницы espressif.com. Разархивируем. Где находятся файлы, для прошивки? Заходим в каталоги Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка). Запускаем программу, … LCD индикаторы на драйвере ML1001Views: 1963 ML1001 – статический LCD GOG (чип в стекле) драйвер для 40-сегментного LCD в позолоченном противоударном исполнении. На них можно каскадно строить цельные из 80 или 120 сегментов LCD индикаторы. …
LCD индикаторы на драйвере ML1001Views: 1963 ML1001 – статический LCD GOG (чип в стекле) драйвер для 40-сегментного LCD в позолоченном противоударном исполнении. На них можно каскадно строить цельные из 80 или 120 сегментов LCD индикаторы. … Мультимедийная сеть – AVC-LAN TOYOTAViews: 5835 AVC LAN – протокол обмена данными мультимедийных систем автомобиля. Кодирование данных. При кодировании различаться три типа данных : преамбула – её назначение, это сообщение устройствам на шине, что начинается передача данных. …
Мультимедийная сеть – AVC-LAN TOYOTAViews: 5835 AVC LAN – протокол обмена данными мультимедийных систем автомобиля. Кодирование данных. При кодировании различаться три типа данных : преамбула – её назначение, это сообщение устройствам на шине, что начинается передача данных. … TDA7294 part 1Views: 381 TDA7294 має унікальні дані для створення підсилювачів звукової частоти HI-FI класу. Варіант застосування є конфігурація BRIDGE (мостова схема включення), де використовуються два TDA7294, як показано на схематичній діаграмі …
TDA7294 part 1Views: 381 TDA7294 має унікальні дані для створення підсилювачів звукової частоти HI-FI класу. Варіант застосування є конфігурація BRIDGE (мостова схема включення), де використовуються два TDA7294, як показано на схематичній діаграмі … Гаджеты для домашней автоматики – Датчик движенияViews: 1472 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет …
Гаджеты для домашней автоматики – Датчик движенияViews: 1472 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет … ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 6050 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. …
ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 6050 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. … Бегущие огни на WS2812BViews: 4964 В настоящее время большой популярностью стали пользоваться светодиоды со встроенным драйвером WS2812B. Текущий проект предназначен показать возможность использования и управления этими светодиодами. Это и проект и исследование по …
Бегущие огни на WS2812BViews: 4964 В настоящее время большой популярностью стали пользоваться светодиоды со встроенным драйвером WS2812B. Текущий проект предназначен показать возможность использования и управления этими светодиодами. Это и проект и исследование по …