Views: 806
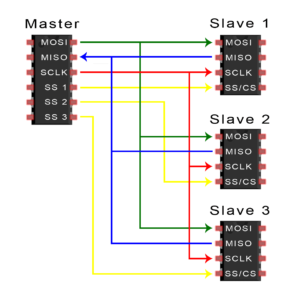
В PIC32MX795F512H доступно 3 SPI это SPI2, SPI3, SPI4.
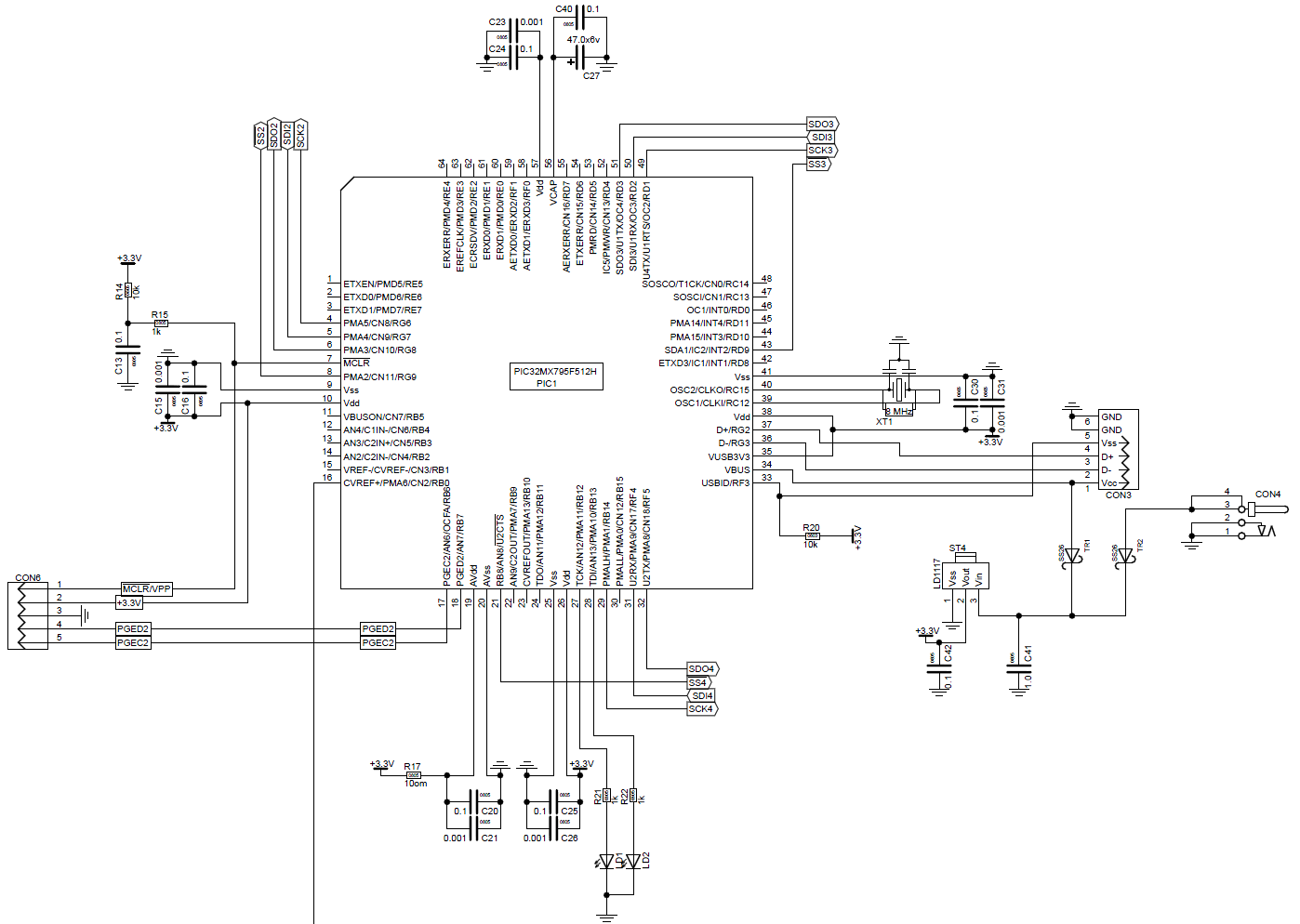 схема в PDF
схема в PDF
Настройка SPI модуля сводиться к следующим параметрам, например, для SPI2 для работы со светодиодами APA102, в этом варианте нам требуются только две линии линия данных и линия синхронизации.
Выключим модуль (если он был включен)
// SPI2CON=0; // выключить SPI //
Выберем тип буфера, 0 – обычный или 1-расширенный, в расширенном режиме в зависимости от того какой раз мер данных мы получаем разную глубину FIFO. Если размер данных 8 бит, то получаем 16 буферов, приема передачи в отделенности, 16 бит – 8 байт, если 32 бит – 4 байта в каждом буфере.
// SPI2CONbits.ENHBUF=1; // Расширенный буфер //
Настраиваем длину данных, в нашем случае 8 бит
// SPI2CONbits.MODE32=0; // 0 - 8-bit - 16 буферов //
Задаем режим работы модуля
// SPI2CONbits.MSTEN=1; // 1 = Master mode //
Задаем параметры шины синхронизации
// SPI2CONbits.CKP=1; // пассивный уровень шины CLOCK высокий SPI2CONbits.CKE=0; // данные передаются от активного к пассивному уровню пассивного к активному уровню //
Задаем тактовую частоту шины
// SPI2BRG = 15; // 2,5MHz для 80 MHz //
Включаем модуль в работу
// SPI2CONbits.ON=1; // Включить модуль //
В общем виде
// настройка SPI
SPI2CON=0; // выключить SPI
SPI2CONbits.ENHBUF=1; // Расширенный буфер
SPI2CONbits.MODE32=0; // 0 - 8-bit - 16 буферов
SPI2CONbits.MSTEN=1; // 1 = Master mode
SPI2CONbits.CKP=1; // пассивный уровень шины CLOCK высокий
SPI2CONbits.CKE=0; // данные передаются от активного к пассивному уровню пассивного к активному уровню
SPI2BRG = 15; // 2,5MHz для 80 MHz
SPI2CONbits.ON=1; // Включить модуль
//
Если необходимо работать с прерывания можно настроить
//
SPI2CONbits.STXISEL=0b00; //
IFS1bits.SPI2TXIF = 0; // сбросить флаг прерывания TX
IEC1bits.SPI2TXIE = 1; // разрешить прерывания от TX
IPC7bits.SPI2IP = 3; // приоритет 3
IPC7bits.SPI2IS = 0; // субприоритет уровень 0
//
Это может быть интересно
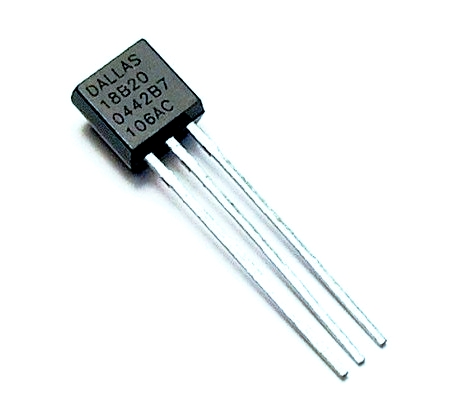 Защита датчиков температуры DS18B20 от статического электричестваViews: 2015 Статья перепечатана с сайта http://svetomuzyka.narod.ru При удалении датчика на большие расстояния возникает опасность наведения импульсов высокого напряжения на кабель, который соединяет датчик с контролером. Если не принимать меры защиты, …
Защита датчиков температуры DS18B20 от статического электричестваViews: 2015 Статья перепечатана с сайта http://svetomuzyka.narod.ru При удалении датчика на большие расстояния возникает опасность наведения импульсов высокого напряжения на кабель, который соединяет датчик с контролером. Если не принимать меры защиты, …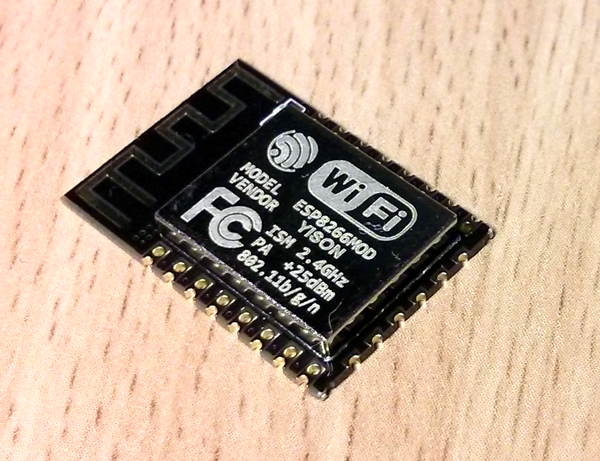 WiFi ESP8266 ESP-202 (ESP-12F)Views: 8048 Первое знакомство, сначала надо его купить… http://voron.ua/catalog/024404 Схема для подключения и тестирования По схеме ставим две кнопки, сброс и кнопку BT2, для перевода в режим обновления прошивки. Если надо сделать …
WiFi ESP8266 ESP-202 (ESP-12F)Views: 8048 Первое знакомство, сначала надо его купить… http://voron.ua/catalog/024404 Схема для подключения и тестирования По схеме ставим две кнопки, сброс и кнопку BT2, для перевода в режим обновления прошивки. Если надо сделать … NeoPixel LED и PIC18Views: 1930 Еще раз об управлении светодиодами на драйвере WS2812 и ему подобных. Как известно эти светики управляются по однопроводной шине. Основная особенность, что программно можно описать передачу данных, …
NeoPixel LED и PIC18Views: 1930 Еще раз об управлении светодиодами на драйвере WS2812 и ему подобных. Как известно эти светики управляются по однопроводной шине. Основная особенность, что программно можно описать передачу данных, … ch-4050 – дифференциальный терморегуляторViews: 2090 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя …
ch-4050 – дифференциальный терморегуляторViews: 2090 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя … CLUBBEST-50-LightViews: 482 CLUBBEST-50-LIGHT Зміст Короткий опис проекту. 1 Опис схемотехніки візуалізатора музики. 2 Аудіо вхід. 3 MCU. 4 Цифровий вихід. 5 Схема живлення MCU. 6 Складання пристрою. 7 Список …
CLUBBEST-50-LightViews: 482 CLUBBEST-50-LIGHT Зміст Короткий опис проекту. 1 Опис схемотехніки візуалізатора музики. 2 Аудіо вхід. 3 MCU. 4 Цифровий вихід. 5 Схема живлення MCU. 6 Складання пристрою. 7 Список … Development board based on MCU PIC18F47Q84Views: 2841 PIC18F47Q84 Microcontroller Family with CAN Flexible Data Status: In Production.
Development board based on MCU PIC18F47Q84Views: 2841 PIC18F47Q84 Microcontroller Family with CAN Flexible Data Status: In Production. OLED RET012864E/REX012864JViews: 1613 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как …
OLED RET012864E/REX012864JViews: 1613 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как … AD9833 – Programmable Waveform GeneratorViews: 3091 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить …
AD9833 – Programmable Waveform GeneratorViews: 3091 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить … CCP – модуль в режиме Compare на примере PIC18Views: 3277 CCP – модуль можно использовать в трех режимах: Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями. Compare – позволяет …
CCP – модуль в режиме Compare на примере PIC18Views: 3277 CCP – модуль можно использовать в трех режимах: Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями. Compare – позволяет … MCC PIC24 – модуль REAL-TIME CLOCK AND CALENDAR (RTCC)Views: 720 RTCC предоставляет пользователю часы реального времени и функция календаря (RTCC), точность “хода” может быть откалибрована. Основные особенности модуля RTCC: • Работает в режиме глубокого сна. • Возможность выбора источника …
MCC PIC24 – модуль REAL-TIME CLOCK AND CALENDAR (RTCC)Views: 720 RTCC предоставляет пользователю часы реального времени и функция календаря (RTCC), точность “хода” может быть откалибрована. Основные особенности модуля RTCC: • Работает в режиме глубокого сна. • Возможность выбора источника …