
Views: 1835
Страница в pdf
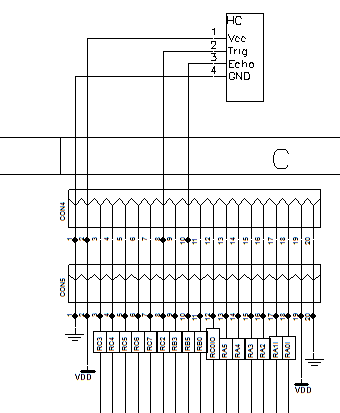
Ультразвуковой метод измерения расстояния является одним из самых распространенных. Ультразвуковой модуль HC-SR04 имеет 4 вывода.
 Vcc – напряжение питания 5 вольт
Vcc – напряжение питания 5 вольт
Trig – вход запускающих импульсов для процесса измерения
Echo – выход импульса длительность которого пропорциональна расстоянию.
GND – общий провод питания.
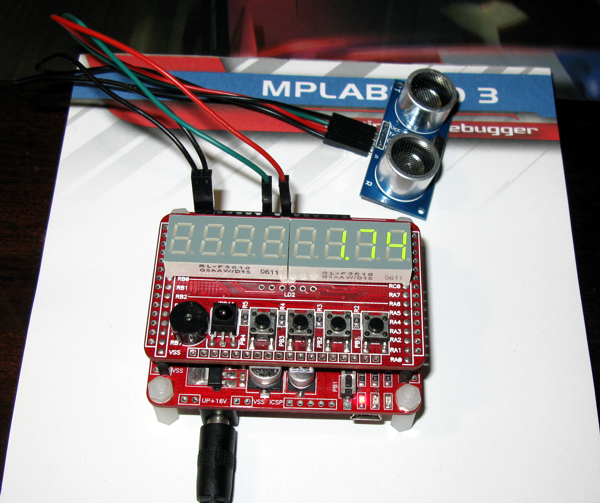
Для демо примера будем использовать плату ILLISSI-4B-03-primum и плату индикации ILLISSI-4С-01-secundo.
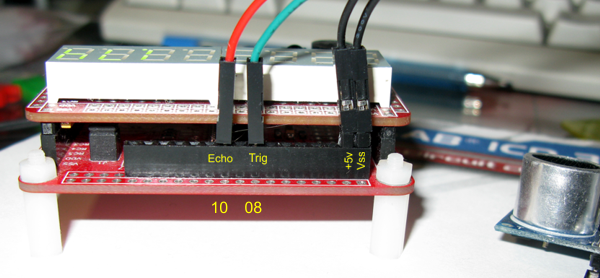
В качестве управления будем использовать вывод RC2, для измерения длительности будем использовать вход T1G (RB5). Подключение:
Для измерения частоты используется таймер 1 и его Gate-модуль управления.
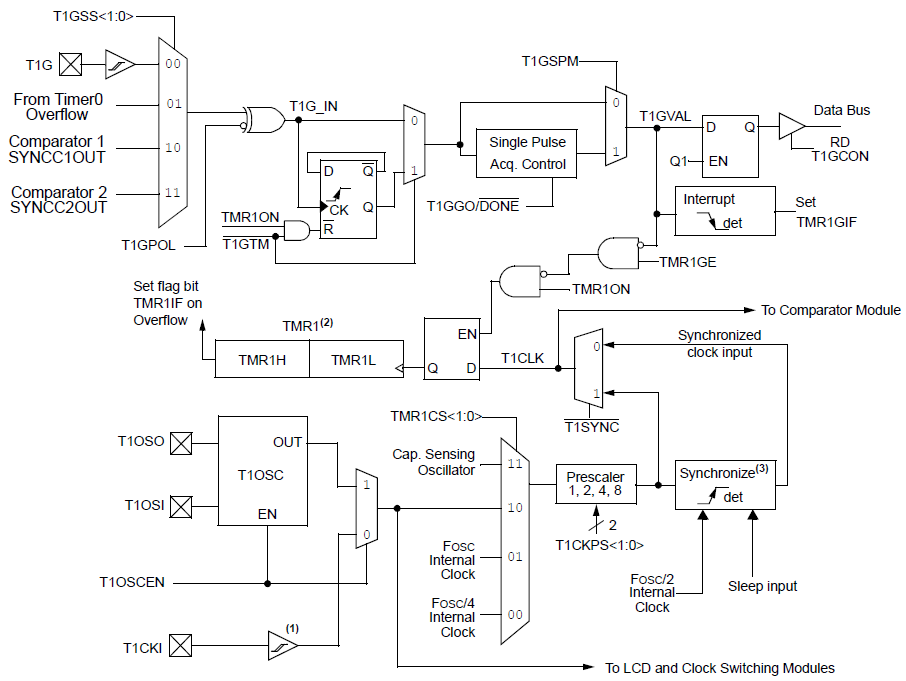
Gate-модуль управления появился в новых Pic-контроллерах серии PIC16F19xx. Теперь элементарно легко построить измерителей длительности и частоты сигнала, которые аппаратно, самостоятельно выполняют эти функции не отвлекая микроконтроллер от основной задачи.
Для измерения сигнала настроим таймер для измерение длительности импульсов. На вход будем подавать тактовую частоту 1 мГц. Что соответствует 1 мкс длительности. Измеряемый импульс (эхо от модуля HC-SR04) будем подавать на вход T1G.
T1CON=0b00110001; // настройка таймера T1CON
// |||||| |
// |||||| +-- TMR1ON таймер включить
// |||||+---- T1SYNC синхронизация отключена
// ||||+----- T1OSCEN генератор отключен
// ||++------ T1CKPS настройка предделителя 00 - 1:1
// ++-------- TMR1CS выбор тактовой частоты FOSC
T1GCON=0b11000100; // регистр ворот
// ||||||++-- T1GSS<1:0>: выбор входа для модуля ворот 00 - TGP1
// ||||||+--- T1GVAL: Флаг
// |||||+---- T1GSPM: выбор синхронизация от модуля единичного импульса
// ||||+----- T1GGO/DONE: запуск одиночного измерения
// |||+------ T1GSPM: управление триггером режима (отключен)
// ||+------- T1GTM: управление триггером режима (отключен)
// |+-------- T1GPOL: таймер 1 работает когда уровень высокий
// +--------- TMR1GE: регистр ворот включен и управляет таймером 1
Вариант настройки таймера выполнен с учетом, что тактовая частота контроллера 32 мГц. (хотя с успехом можно использовать и более низкие тактовые частоты от 1 мГц.).
Процесс измерения начинается с инициализации таймера и сброса флага переполнения таймера.
TMR1IF=0; // сброс флага переполнения TMR1H=0; // сброс регистров таймер TMR1L=0; //
Особенности работы модуля не соответствующие описанию.
Флаг переполнения будет использоваться для определения ситуации когда модуль HC-SR04 не может получить эхо. На практике было определено, что работа модуля немного отличается от описания, которое было найдено в инете. Дело в том что при отсутствия эха, модуль формирует непрерывный импульс.

Длительность импульса ответа непрерывна и прерывается только в момент формирования импульса запуска измерения. Вид на ответ от модуля в ситуации отсутствия эха.

Если эхо присутствует, то мы будем видеть следующие осциллограммы работы с модулем.

В начале формируется (на входе Trig) импульс запуска длительностью не менее 10 мкс. После этого модуль через 0,5 мс, начинает формировать ответ импульсом длительностью пропорциональной расстоянию. На нижнем рисунке, пример, формирования импульса (это расстояние от поверхности моего стола до потолка и составляет 1,74 м).

Длительность 10114 мкс. Что составляет 10114/58=174 см.
После инициализации регистров таймера и очистки флага переполнения, формируем импульс запуска длительностью не менее 10 мкс.
// формирование импульса запуска LATC2=1; __delay_us (10); LATC2=0;
После этого включаем таймер и запускаем режим измерения одиночного импульса.
TMR1ON=1; // включение таймера T1GGO=1; // запуск одиночного измерения
Далее ожидаем окончания измерения, при этот контролируем, флаг переполнения таймера и если такое “неподобство” наступит, будем подсчитывать количество таких измерений. Это необходимо, чтобы сделать индикацию отсутствия эха, приемлемой для восприятия.
while(T1GGO)// ожидания окончания измерения
{
CLRWDT(); // сброс сторожевого таймера
if(TMR1IF)
{
T1GGO=0;// останов измерения при переполнении таймера
ERROR++;// подсчет количества измерений когда отсутствует эхо
}
}
После выполнения измерения, останавливаем таймер:
TMR1ON=0;//остановить таймер
Далее по результатам измерения выводим на индикатор измеренное расстояние или сообщение, что нет эха, т.е. нет препятствий в зоне чувствительности модуля.
if(!TMR1IF)
{
// чтение регистров таймера
pwm_reg=TMR1L;
pwm_reg += TMR1H << 8;
// ФИЛЬТР устранения дрожания индикации при смене показаний "накапливающий интегратор"
if(pwm_reg^pwm_regp && porog)porog--;
else
{
pwm_regp=pwm_reg;
porog=2;
}
// преобразование в сантиметры длины
// bin_dec (pwm_reg/58,2); // индикации "не отфильтрованного" сигнала
bin_dec (pwm_regp/58,2);// индикация после фильтра
ERROR=0;
// индикация
indic (dmil,miln,stys,dtys,tysc,sotn,dest,edin,6); // вывод значения на дисплей
}
else
{
// индикация отсутствия эха
if(ERROR>4)indic (cM,cn,co,0,cE,ch,co,cM,0); // вывод значения на дисплей
}
Примечание: для устранения “дрожания” показаний применим «накапливающий интегратор». За это отвечают строки:
// ФИЛЬТР устранения дрожания индикации при смене показаний "накапливающий интегратор"
if(pwm_reg^pwm_regp && porog)porog--;
else
{
pwm_regp=pwm_reg;
porog=2;
}
И в конце, сформируем задержку, которая необходима для формирования периода подачи импульсов изменения не менее чем через 50 мс.
__delay_ms (50);// формирования периода запуска сенсора
Выводы: Датчик обладаем широким углом захвата, поэтому его рекомендуется устанавливать над плоскими поверхностями на расстоянии не менее 10 мм. В связи с этим он захватывает отраженные импульсы от предметов которые находятся от его оси до ±15 грд., что необходимо учитывать при конструировании устройств. Реальная чувствительность не более 3 метров. На большие расстояния не хватает или мощности формируемого импульса или чувствительности приемника. Мое мнение – я считаю, что для таких модулей вывод измеряемого параметра в виде ширины импульса не практично, так-как получается два цикла измерения, первое это измерение делает модуль, второе контроллер. Для таких устройств желательно, что-бы все эти преобразования были выполнены в самом модуле. А на выходе формировать уже значение расстояния в виде готовых цифровых данных. А получать данные из модуля, удобно через последовательные интерфейсы I2C, SPI или UART.
Фото демо проекта
Видео демо проекта
__
Проект
Это может быть интересно
 NS108-5050-16bit от NewstarViews: 722 Кто уже использует в своих проектах адресуемые светодиоды хорошо знакомы с такими как WS2812 и им подобные. Эти светодиоды для управления используют однопроводную шину. Из-за этого пропускная способность …
NS108-5050-16bit от NewstarViews: 722 Кто уже использует в своих проектах адресуемые светодиоды хорошо знакомы с такими как WS2812 и им подобные. Эти светодиоды для управления используют однопроводную шину. Из-за этого пропускная способность … Altium Designer my setup system and project structureViews: 1082 Используйте только последнее обновление!!! Updates https://catcatcat.d-lan.dp.ua/altium-designer-my-libraries-project-templates-system-settings-by-catcatcat-v23-09/ Тут хочу поделиться как я настраиваю Altium Designer и как я использую файлы DXPPreferences.DXPPrf для быстрой конфигурации и получения …
Altium Designer my setup system and project structureViews: 1082 Используйте только последнее обновление!!! Updates https://catcatcat.d-lan.dp.ua/altium-designer-my-libraries-project-templates-system-settings-by-catcatcat-v23-09/ Тут хочу поделиться как я настраиваю Altium Designer и как я использую файлы DXPPreferences.DXPPrf для быстрой конфигурации и получения … Интерактивные LedViews: 620 Тема проекта продолжение следует…. Это может быть интересно
Интерактивные LedViews: 620 Тема проекта продолжение следует…. Это может быть интересно BMP280 – температура и атмосферное давление – учебный проектViews: 2292 Учебный проект на PIC32 и светодиодной панели P5 (2121)-168-6432-80 (32*64). Проект позволяет ознакомиться с простой графикой и с чтением давления и температуры с датчика BMP280. Для тестирования необходимо …
BMP280 – температура и атмосферное давление – учебный проектViews: 2292 Учебный проект на PIC32 и светодиодной панели P5 (2121)-168-6432-80 (32*64). Проект позволяет ознакомиться с простой графикой и с чтением давления и температуры с датчика BMP280. Для тестирования необходимо … Счетчики посетителейViews: 1310 Вас сосчитали!? или счетчики посетителей. Для чего нужны счетчики посетителей? Какие они бывают? ТОРГОВЛЯ. Подсчитайте, сколько ваш магазин посещает человек за день. Кок много человек приходит утром, какое …
Счетчики посетителейViews: 1310 Вас сосчитали!? или счетчики посетителей. Для чего нужны счетчики посетителей? Какие они бывают? ТОРГОВЛЯ. Подсчитайте, сколько ваш магазин посещает человек за день. Кок много человек приходит утром, какое … Универсальный терморегулятор ch-c3000Views: 3235 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в …
Универсальный терморегулятор ch-c3000Views: 3235 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в … Kitchen timer with contactless gesture controlViews: 817 Кухонний таймер з безконтактним керуванням жестами дозволяє встановити необхідний період часу для приготування страв, не торкаючись пристрою. Дуже зручно під час приготування їжі, коли руки забрудниться. Усі …
Kitchen timer with contactless gesture controlViews: 817 Кухонний таймер з безконтактним керуванням жестами дозволяє встановити необхідний період часу для приготування страв, не торкаючись пристрою. Дуже зручно під час приготування їжі, коли руки забрудниться. Усі … Game, exercise machine – Logic Gates.Views: 38 Game, exercise machine – Logic Gates. A game, a simulator, a gift – the development of logical thinking. The game is designed to develop logical thinking in children, …
Game, exercise machine – Logic Gates.Views: 38 Game, exercise machine – Logic Gates. A game, a simulator, a gift – the development of logical thinking. The game is designed to develop logical thinking in children, … Проект с использованием MCC часть 15Views: 1772 EUSART – Универсальный асинхронный приёмопередатчик (УАПП, англ. Universal Asynchronous Receiver-Transmitter, UART) — узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. … читать на вики. Внесем изменения в нашу схему, …
Проект с использованием MCC часть 15Views: 1772 EUSART – Универсальный асинхронный приёмопередатчик (УАПП, англ. Universal Asynchronous Receiver-Transmitter, UART) — узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. … читать на вики. Внесем изменения в нашу схему, … Проект с использованием MCC часть 05Views: 2228 Эту часть назовем так как избавься от delay, там где а это реально не надо. Для это нам потребуется научиться использовать прерывания и работать с таймерами. Что такое …
Проект с использованием MCC часть 05Views: 2228 Эту часть назовем так как избавься от delay, там где а это реально не надо. Для это нам потребуется научиться использовать прерывания и работать с таймерами. Что такое …