Views: 888
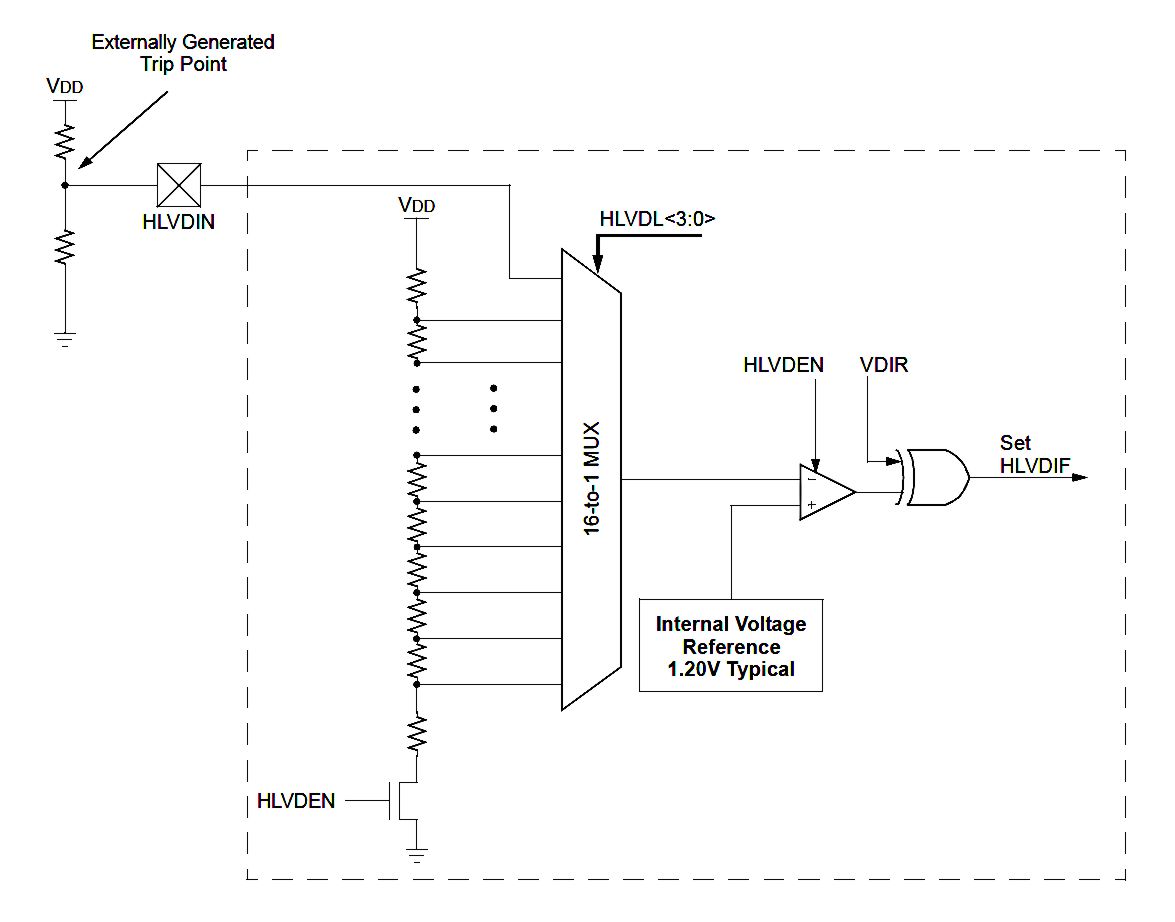
HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что необходимо выполнить соответствующие действия. Часто этот модуль необходим, чтобы выполнить обработку аварийных ситуаций при пропадании напряжения питания.
В микроконтроллере PIC24FJ128GA204 есть возможность получения аналогового сигнала с внешнего делителя, но есть микроконтроллеры, в котором этот вход отсутствует, и возможен контроль только самого напряжения питания микроконтроллера. Внешний вход позволяет значительно расширить контроль напряжения питания, можно вывести контроль на входное напряжение до стабилизатора и на раннем этапе обнаружить понижение напряжения и раньше начать выполнять процедуру остановки системы.
Модуль имеет один регистр управления HLVDCON. Назначение бит следующее:
| HLVDCON: HIGH/LOW-VOLTAGE DETECT CONTROL REGISTER | |||||||
| R/W-0 | U-0 | R/W-0 | U-0 | U-0 | U-0 | U-0 | U-0 |
| HLVDEN | LSIDL | ||||||
| bit 15 | bit 14 | bit 13 | bit 12 | bit 11 | bit 10 | bit 9 | bit 8 |
| R/W-0 | R/W-0 | R/W-0 | U-0 | R/W-0 | R/W-0 | R/W-0 | R/W-0 |
| VDIR | BGVST | IRVST | HLVDL3 | HLVDL2 | HLVDL1 | HLVDL0 | |
| bit 7 | bit 6 | bit 5 | bit 4 | bit 3 | bit 2 | bit 1 | bit 0 |
bit 15 HLVDEN: бит включения питания модуля
1 = HLVD включен
0 = HLVD отключен
bit 14 Не реализовано: чтение дает ‘0’
bit 13 LIDL: бит работы модуля в режиме ожидания
1 = модуль отключен, когда устройство переходит в режим ожидания
0 = модуль продолжит работу в режиме ожидания
bit 12-8 Не реализовано: чтение дает ‘0’
bit 7 VDIR: Выбор направления изменения напряжения для формирования события
1 = Событие возникает, когда напряжение равно или превышает точку отключения (HLVDL <3: 0>)
0 = Событие возникает, когда напряжение равно или падает ниже точки отключения (HLVDL <3: 0>)
bit 6 BGVST: бит флага стабильности напряжения запрещенной зоны
1 = Указывает, что напряжение запрещенной зоны является стабильным
0 = Указывает, что напряжение запрещенной зоны является неустойчивым
bit 5 IRVST: бит флага стабильности внутренего источника опорного напряжения
1 = Внутреннее опорное напряжение является стабильным; логика High-Voltage Detect генерирует флаг прерывания на
заданный диапазон напряжения
0 = Внутреннее опорное напряжение неустойчиво; логика обнаружения высокого напряжения не приведет к прерыванию флаг в указанном диапазоне напряжений и прерывание HLVD не должно быть включено
bit 4 Не реализовано: чтение дает ‘0’
bit 3-0 HLVDL <3: 0>: бит ограничения обнаружения высокого / низкого напряжения
1111 = используется внешний аналоговый вход (вход поступает от выводов HLVDIN)
1110 = Точка отключения 1 (1)
1101 = точка отключения 2 (1)
*
*
*
1100 = точка срабатывания 3 (1)
0100 = Точка отключения 11 (1)
00xx = состояние не используется
| HIGH/LOW-VOLTAGE DETECT CHARACTERISTICS | ||||||
| Symbol | Characteristic | Min | Typ | Max | Units | |
| VHLVD | HLVD Voltage on VDD Transition |
HLVDL<3:0> = 0100 | 3.45 | 3.59 | 3.74 | V |
| HLVDL<3:0> = 0101 | 3.33 | 3.45 | 3.58 | V | ||
| HLVDL<3:0> = 0110 | 3.0 | 3.125 | 3.25 | V | ||
| HLVDL<3:0> = 0111 | 2.8 | 2.92 | 3.04 | V | ||
| HLVDL<3:0> = 1000 | 2.7 | 2.81 | 2.93 | V | ||
| HLVDL<3:0> = 1001 | 2.50 | 2.6 | 2.70 | V | ||
| HLVDL<3:0> = 1010 | 2.40 | 2.52 | 2.64 | V | ||
| HLVDL<3:0> = 1011 | 2.30 | 2.40 | 2.50 | V | ||
| HLVDL<3:0> = 1100 | 2.20 | 2.29 | 2.39 | V | ||
| HLVDL<3:0> = 1101 | 2.10 | 2.19 | 2.28 | V | ||
| HLVDL<3:0> = 1110 | 2.00 | 2.08 | 2.17 | V | ||
| VTHL | HLVD Voltage on HLVDIN Pin Transition |
HLVDL<3:0> = 1111 | – | 1.2 | – | V |
Настройка модуля для работы с внешним напряжение, для контроля понижение ниже порога в MCC, выглядит таким образом:
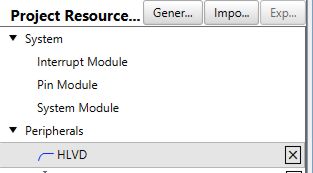
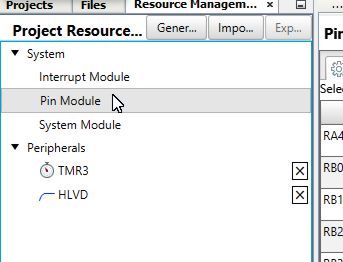
Добавим модуль в ресурсы проекта
Выполним настройку:

Включим модуль (Enable HLVD), активируем прерывания от модуля, в последствии в прерывания включим процедуру, в которой будет необходимо выполнить требуемые операции при пропадании напряжения питания. Выберем внешний вход HLVD для контроля напряжения.
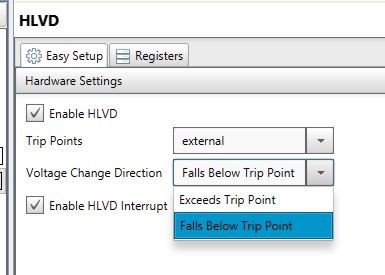
Настроим логику работы прерывания (Voltage Change Direction) Выбор направления изменения напряжения для формирования события:
Exceeds Trip Point – Событие возникает, когда напряжение равно или превышает точку отключения.
Falls Below Trip Point – Событие возникает, когда напряжение равно или падает ниже точки отключения.
Нас интересует вариант когда напряжение упадет ниже значения на входе 1,2 вольта (та как мы используем контроль по внешнему входу). Для контроля более высокого порога нам необходимо применить делитель на резисторах.
Например, нам надо контролировать порог 25 вольт. В качестве резистора “на землю” выберем 10 кОм, рассчитаем “верхний” резистор. Вспоминаем закон Ома.
На резисторе 10 кОм мы должны получить напряжение 1,2 вольта когда входное 25 вольт. Находим ток в цепи:
I= U/R = 1.2 V /10000 Ohm = 0.00012 A.
Падение напряжение на вернем резисторе:
Vv = Vin – 1.2 V = 25 – 1.2 = 23.8 V.
Зная ток в цепи и напряжение на резисторе найдем его сопротивление:
R = U/I = 23.8 V / 0.00012 A = 198333 Ohm.
Это приблизительно 200 kOhm.
Выполним обратный расчет, при напряжении 25 вольт на выходе делителя мы будем иметь 1.1904761904762 вольта. Но учитывая возможную погрешность на применяемом делителе, это все, вполне приемлемо.
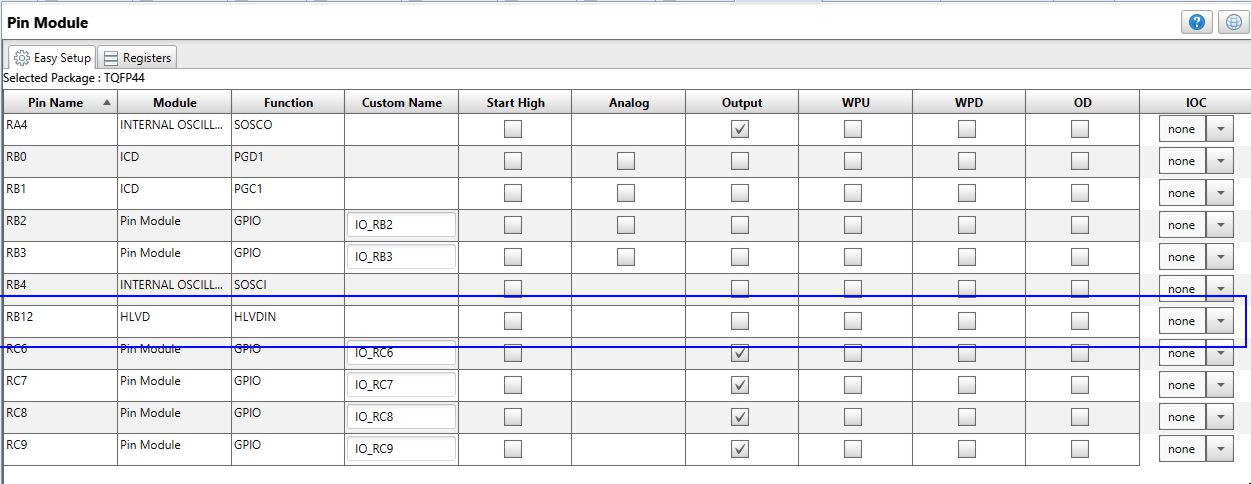
Проверим настройку входа для HLVD модуля:

Выберем Pin Module
и проверим настройку входа
Запустим генерацию файлов в MCC

По окончанию генерации MCC предоставит нам несколько функций:
void HLVD_Initialize (void) – инициализация и настройка модуля под наши параметры, это функция будут включена в процедуру запуска микроконтроллера. Это мы можем убедиться просмотрев функцию void SYSTEM_Initialize (void) в файле systems.c
void SYSTEM_Initialize(void)
{
PIN_MANAGER_Initialize();
CLOCK_Initialize();
INTERRUPT_Initialize();
HLVD_Initialize();
TMR3_Initialize();
}
bool HLVD_IsReferenceVoltageStable(void) – возвращает состояние стабильно или не стабильно опорное напряжение.
bool HLVD_IsBandGapVoltageStable(void) – возвращает состояние стабильно ли контролируемое напряжение.
void HLVD_Enable(void) – предоставляет возможность пользователю включать модуль в процессе работы программы.
void HLVD_Disable(void) – отключать модуль.
void HLVD_TripPointSetup(HLVD_TRIP_DIRECTION direction, HLVD_TRIP_POINTS trip_points) – изменять настройки контроля напряжения.
и сама функция выполнения прерывания от события:
void __attribute__ (( interrupt, no_auto_psv )) _ISR _LVDInterrupt( void )
{
if(IFS4bits.HLVDIF)
{
/* TODO : Add interrupt handling code */
IFS4bits.HLVDIF = 0;
}
}
В нее надо встроить нашу функцию, которая будет обязана выполнить наши задания, если напряжение питания становиться ниже нормы.
Это может быть интересно
 Модуль CAN в микроконтроллерах PIC18Views: 6023 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований …
Модуль CAN в микроконтроллерах PIC18Views: 6023 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований … Система AT команд версии V2.0 для ESP8266 и ESP32Views: 13858 Появление нового модуля на базе ESP32 заставило систематизировать систему AT команд, а так же систему обновления и для модулей на базе ESP8266. Начиная с версии v2.0 в ESP8266 …
Система AT команд версии V2.0 для ESP8266 и ESP32Views: 13858 Появление нового модуля на базе ESP32 заставило систематизировать систему AT команд, а так же систему обновления и для модулей на базе ESP8266. Начиная с версии v2.0 в ESP8266 … Просто о структурах и объединениях в СиViews: 2396 Какие задачи нам позволяют решать структуры и объединения? Для разработчика встроенных систем эффективность и компактность кода всегда на первом месте. Если программировании на Ассемблере ты сам определяешь как …
Просто о структурах и объединениях в СиViews: 2396 Какие задачи нам позволяют решать структуры и объединения? Для разработчика встроенных систем эффективность и компактность кода всегда на первом месте. Если программировании на Ассемблере ты сам определяешь как … Сумеречное релеViews: 1693 Реле управления освещением, датчик день-ночь – одним словом фотореле для управления освещением или формирования сигнала для системы умный дом о понижении или повышении освещенности относительно заданного уровня. Реле выполнено по классической схеме, конденсаторный блок питания, от сети переменного тока …
Сумеречное релеViews: 1693 Реле управления освещением, датчик день-ночь – одним словом фотореле для управления освещением или формирования сигнала для системы умный дом о понижении или повышении освещенности относительно заданного уровня. Реле выполнено по классической схеме, конденсаторный блок питания, от сети переменного тока … Проект с использованием MCC часть 07Views: 1278 Модуль PWM – широтно импульсная модуляция (ШИМ). ПИК контроллеры часто на борту имеют модули ШИМ. На их основе строятся многие узлы управления электро приводами. В нашем варианте мы …
Проект с использованием MCC часть 07Views: 1278 Модуль PWM – широтно импульсная модуляция (ШИМ). ПИК контроллеры часто на борту имеют модули ШИМ. На их основе строятся многие узлы управления электро приводами. В нашем варианте мы … MPLAB X IDE – управление проектамиViews: 1219 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора …
MPLAB X IDE – управление проектамиViews: 1219 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора … Проект с использованием MCC часть 12-2Views: 1234 Настало время для изучения шины I2C. Изучать будем на примере работы с индикатором RET012864E. Что изменили со старой схемы: В прошлой теме я затупил и не добавил подтягивающие резисторы …
Проект с использованием MCC часть 12-2Views: 1234 Настало время для изучения шины I2C. Изучать будем на примере работы с индикатором RET012864E. Что изменили со старой схемы: В прошлой теме я затупил и не добавил подтягивающие резисторы … Altium Designer – создание рисунков на печатной платеViews: 3634 Для создание рисунков на печатной платы в Altium Designer можно использовать возможность использовать в Altium Designer сторонних скриптов. Мне возможность эта очень понравилась и я решил её расшарить …
Altium Designer – создание рисунков на печатной платеViews: 3634 Для создание рисунков на печатной платы в Altium Designer можно использовать возможность использовать в Altium Designer сторонних скриптов. Мне возможность эта очень понравилась и я решил её расшарить …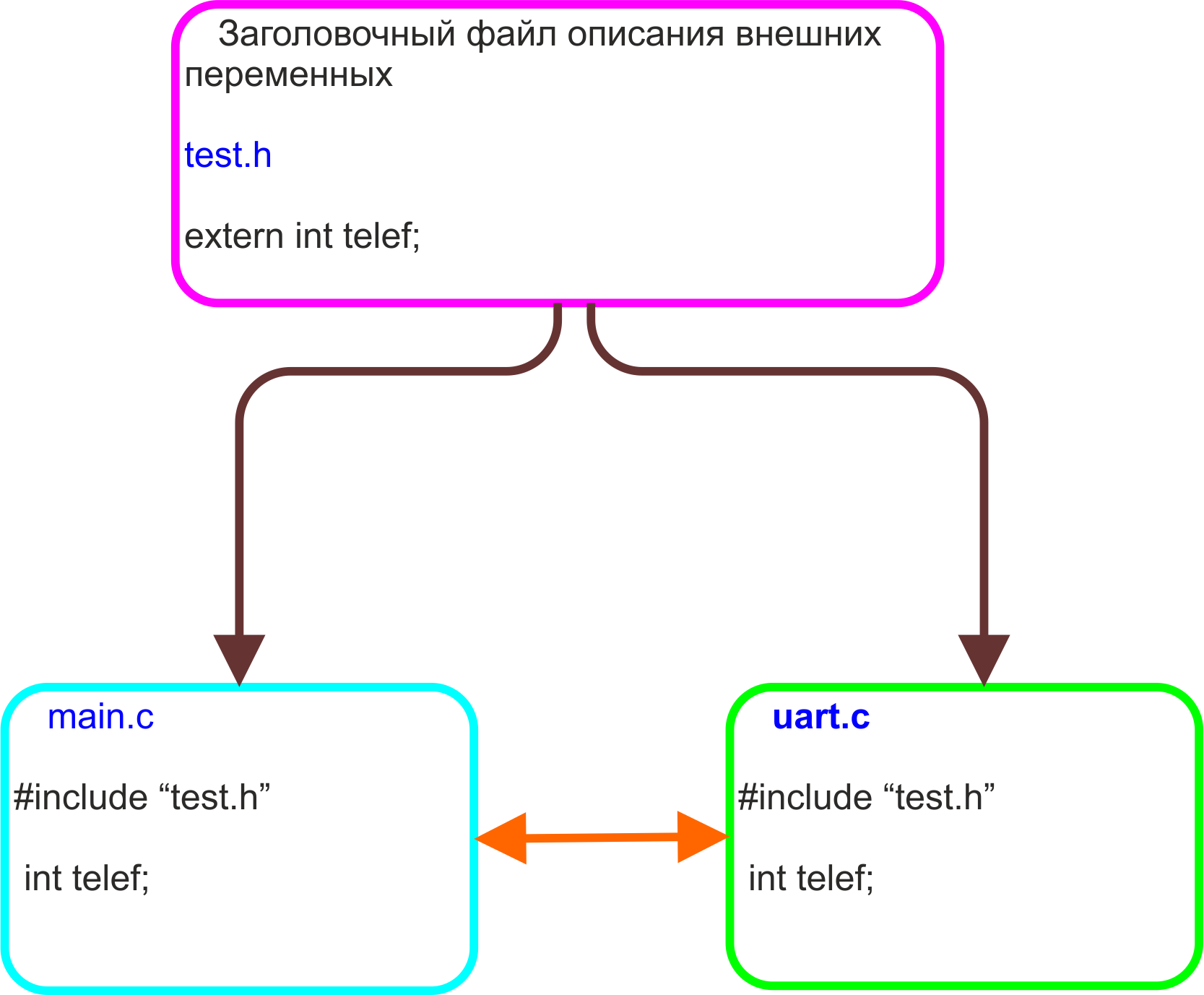 Просто о внешних переменныхViews: 951 Часто возникает задача когда необходимо предавать данные между модулями программы. Например, передать данные между файлами, или управлять работой модулей. Для этого создаем заголовочный файл и описываем наши переменные как …
Просто о внешних переменныхViews: 951 Часто возникает задача когда необходимо предавать данные между модулями программы. Например, передать данные между файлами, или управлять работой модулей. Для этого создаем заголовочный файл и описываем наши переменные как … Electronic Speed Controller for FPV droneViews: 74 Другий проект цієї серії, це контролер швидкості або контролер управління BLCD мотором. Для аналізу було вибрано плату SpeedyBee BLS 55A 4-in-1 ESC із комплекту SpeedyBee F405 V4 BLS …
Electronic Speed Controller for FPV droneViews: 74 Другий проект цієї серії, це контролер швидкості або контролер управління BLCD мотором. Для аналізу було вибрано плату SpeedyBee BLS 55A 4-in-1 ESC із комплекту SpeedyBee F405 V4 BLS …