
Views: 734
Запуск первой программы при изучении микроконтроллера сводиться, к тому, чтобы начал мигать светодиод. В нашем случае светодиод подключен к Выводу RB13.
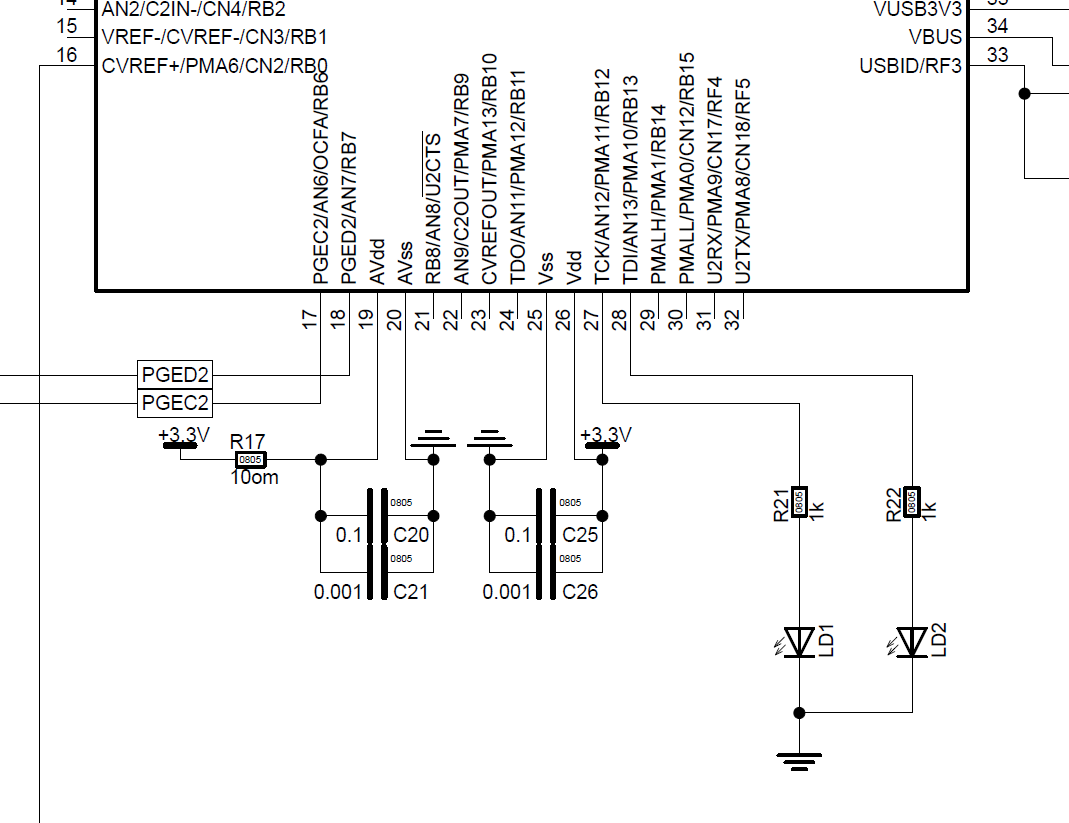
В PIC32 не рекомендуется использовать макросы типа DELAY для формирования задержки, ну это и по большому счету не корректно, по этому для формирования задержки воспользуемся таймером T1. Работу таймера описывать не буду, только уточним, что таймер тактируется от системного генератора частотой 80 МГц (внешний керамический резонатор 8 МГц). Настройка таймера для получения видимых мигание светодиода сводиться к трем строкам:
//-------------------------------------------------------------------------------
PR1 = 0xFFFF; // настройка периода
T1CONbits.TCKPS = 0b11; // 11 = 1:256 prescale value
T1CONbits.ON = 1; // включить
//-------------------------------------------------------------------------------
Управление миганием светодиода поместим в основной цикл и контролировать будем по флагу переполнения таймера.
while(1)
{
if(IFS0bits.T1IF == 1)
{
IFS0bits.T1IF = 0; // сброс флага переполнения
LATBINV = 0b0001000000000000; // мигание светодиодом
}
Clear_WDT(); // сброс сторожевого таймера
}
Проект формате MPLABX v2.30 компилятор XC32 v1.34
Это может быть интересно
 Проект с использованием MCC часть 05Views: 2257 Эту часть назовем так как избавься от delay, там где а это реально не надо. Для это нам потребуется научиться использовать прерывания и работать с таймерами. Что такое …
Проект с использованием MCC часть 05Views: 2257 Эту часть назовем так как избавься от delay, там где а это реально не надо. Для это нам потребуется научиться использовать прерывания и работать с таймерами. Что такое … Дифференциальный терморегуляторViews: 4175 Дифференциальный терморегулятор ch-3020 Назначение. Ch-c3020 представляет собой дифференциальный терморегулятор. Основное назначение солнечные системы горячего водоснабжения, а также вентиляционные системы управление притоком свежего воздуха. Контроллер позволяет работать пяти режимах. …
Дифференциальный терморегуляторViews: 4175 Дифференциальный терморегулятор ch-3020 Назначение. Ch-c3020 представляет собой дифференциальный терморегулятор. Основное назначение солнечные системы горячего водоснабжения, а также вентиляционные системы управление притоком свежего воздуха. Контроллер позволяет работать пяти режимах. … MPLAB X IDE – управление проектамиViews: 1221 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора …
MPLAB X IDE – управление проектамиViews: 1221 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора … Altium Designer my setup system and project structure V23.3Views: 470 Оновлення бази даних та шаблонів від березня 2023 року. Updating the database and templates from March 2023. Altium Designer my Libraries, Project templates, System settings by Catcatcat. Дивись …
Altium Designer my setup system and project structure V23.3Views: 470 Оновлення бази даних та шаблонів від березня 2023 року. Updating the database and templates from March 2023. Altium Designer my Libraries, Project templates, System settings by Catcatcat. Дивись … Униполярный шаговый двигатель – часть 2Views: 1064 В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима. В …
Униполярный шаговый двигатель – часть 2Views: 1064 В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима. В … Сенсорный выключатель светаViews: 16555 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида …
Сенсорный выключатель светаViews: 16555 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида … Flight controller for FPV drone.Views: 86 Reverse engineering of a flight controller (SpeedyBee F405 V4 55A 30×30 Stack). Мене зацікавила конструкція основних компонентів FPV-дрона. Першим варіантом, який я розглянув, був контролер польоту від китайської …
Flight controller for FPV drone.Views: 86 Reverse engineering of a flight controller (SpeedyBee F405 V4 55A 30×30 Stack). Мене зацікавила конструкція основних компонентів FPV-дрона. Першим варіантом, який я розглянув, був контролер польоту від китайської … Оптосимистор и его применениеViews: 20254 Эрве Кадино “Цветомузыкальные установки” Ответ на вопрос – управление мощным тиристором или симистором, от терморегулятора. Статья в pdf[wpdm_file id=129 template=”link-template-calltoaction3.php”] Оптосимистор принадлежат к классу оптронов и обеспечивают очень хорошую …
Оптосимистор и его применениеViews: 20254 Эрве Кадино “Цветомузыкальные установки” Ответ на вопрос – управление мощным тиристором или симистором, от терморегулятора. Статья в pdf[wpdm_file id=129 template=”link-template-calltoaction3.php”] Оптосимистор принадлежат к классу оптронов и обеспечивают очень хорошую … Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0Views: 314 Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0 Here I want to share how I configure Altium Designer and how I use the DXPPreferences1.DXPPrf …
Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0Views: 314 Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0 Here I want to share how I configure Altium Designer and how I use the DXPPreferences1.DXPPrf … Acquaintance with audio-bluetooth modules F-6888 (BK3254).Views: 2446 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, …
Acquaintance with audio-bluetooth modules F-6888 (BK3254).Views: 2446 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, …