
Views: 5697
AVC LAN – протокол обмена данными мультимедийных систем автомобиля.
Кодирование данных.
При кодировании различаться три типа данных :
- преамбула – её назначение, это сообщение устройствам на шине, что начинается передача данных.
- бит 0 – передача данных 0
- бит 1 – передача данных 1
Преамбула.
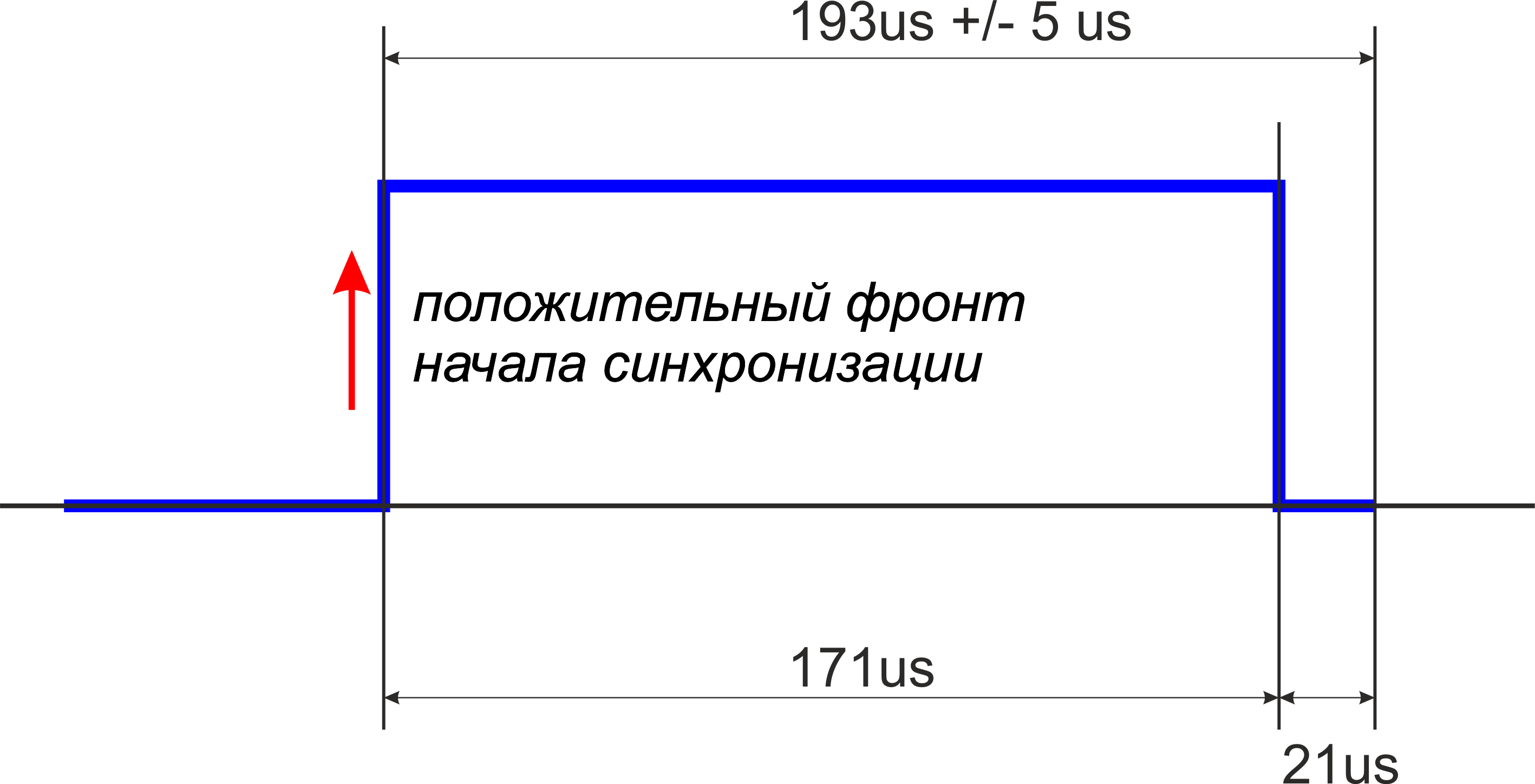
Длительность положительного импульса может быть в пределах от 150 us до 171 us, соответственно и меняется длительность отрицательного. Длительность периода находиться в районе 193 us. Для начала измерения длительности всегда используется момент синхронизации от положительного фронта и измерение длительности положительного импульса. Логика преамбулы определения начала передачи данных – это если полученная длительность больше 150 us – то это начало передачи последовательности данных.
Бит 0.
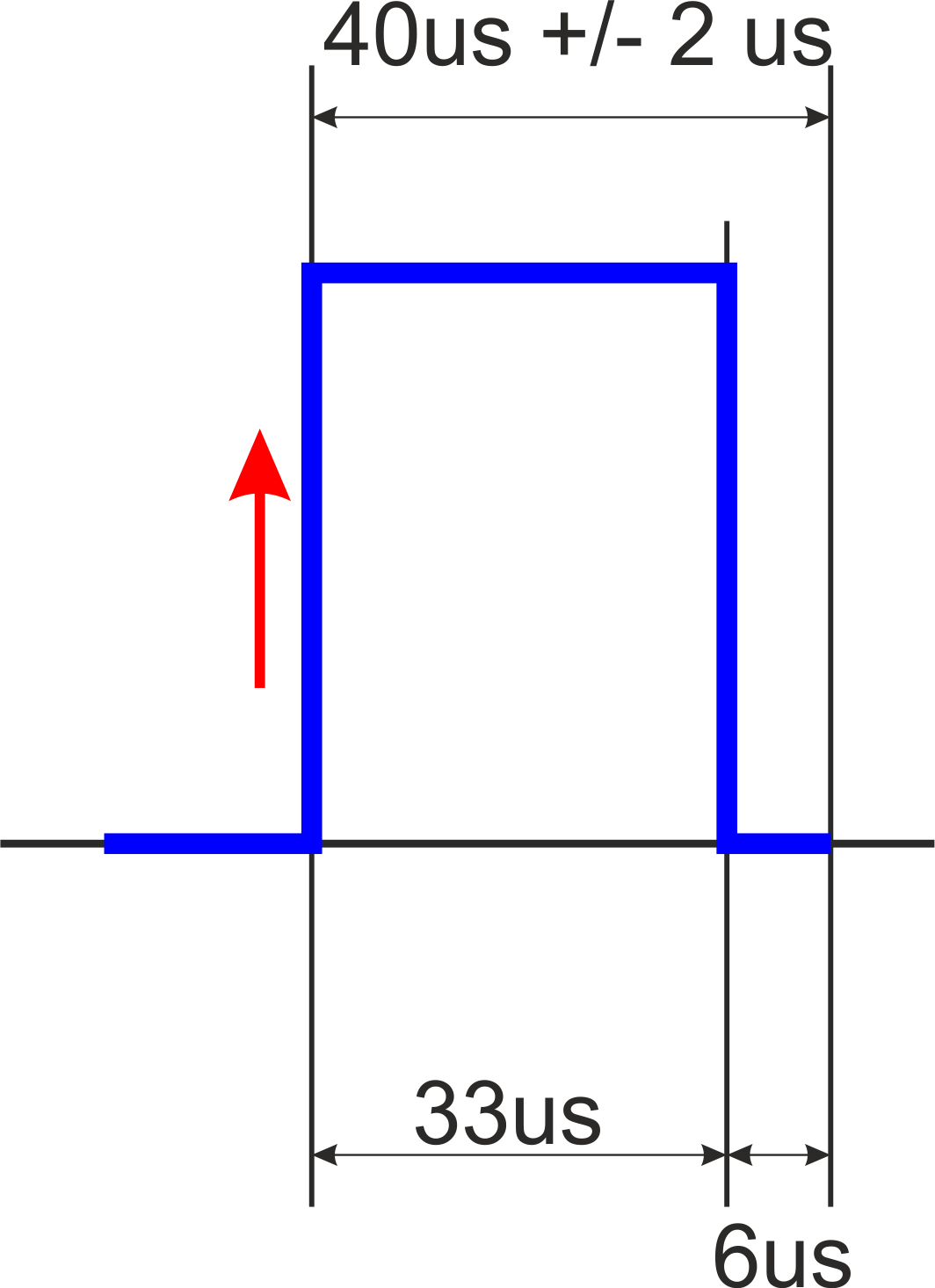
Общая длительность в районе 39-40 us. Правила измерения те же, что и для преамбулы. Бит 0 в такой системе передачи данных является доминирующим. Он имеет приоритет при арбитраже на шине, это позволяет устройствам с меньшим адресом выигрывать арбитраж.
Бит 1.
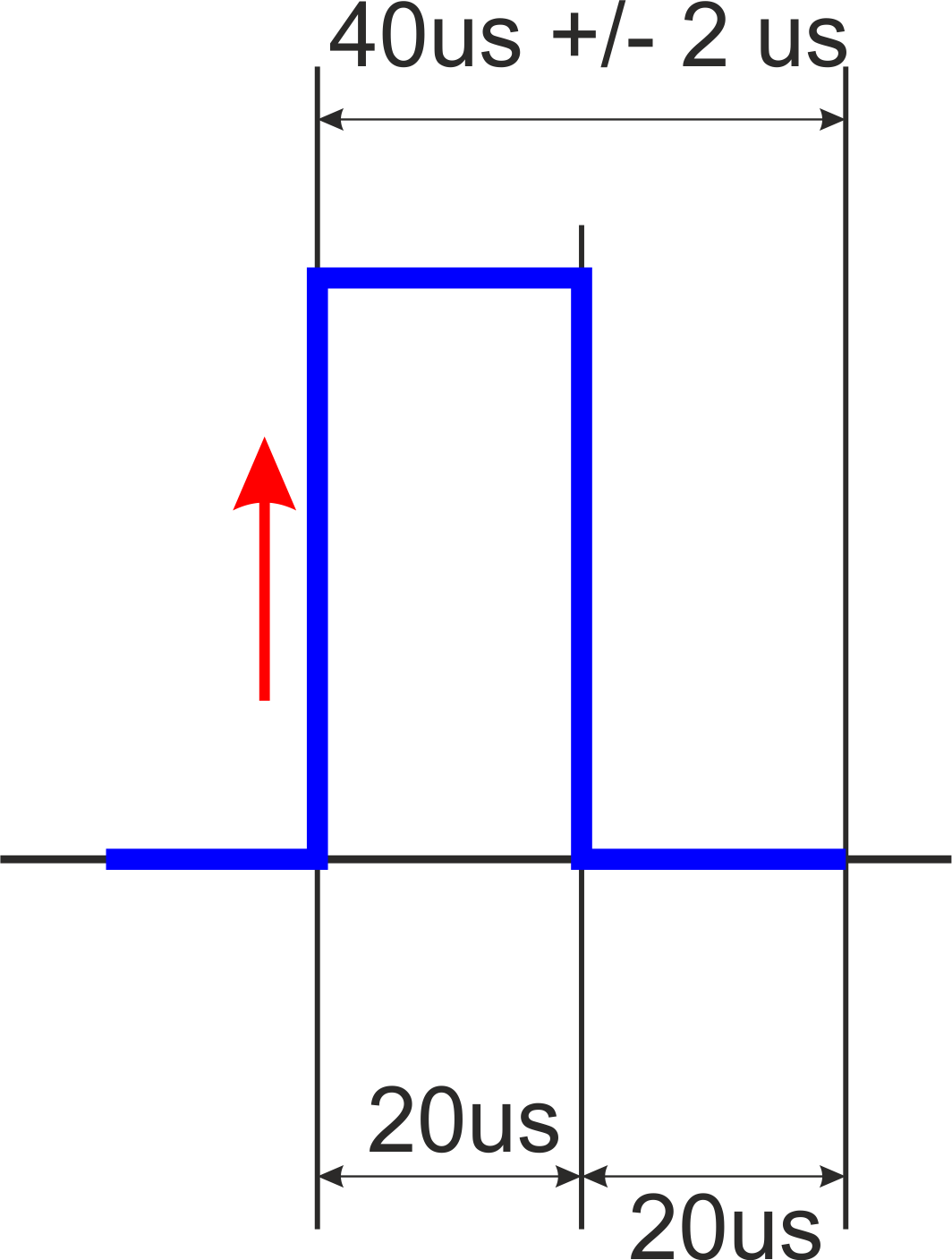
Значение длительностей могут незначительно отличаться, так отрицательная длительность может быть 18-19 us. А длительность периода в районе до 38 us. Для декодирования можно использовать принцип если длительность положительного импульса больше 27 us значит получен “0”, если меньше “1”.
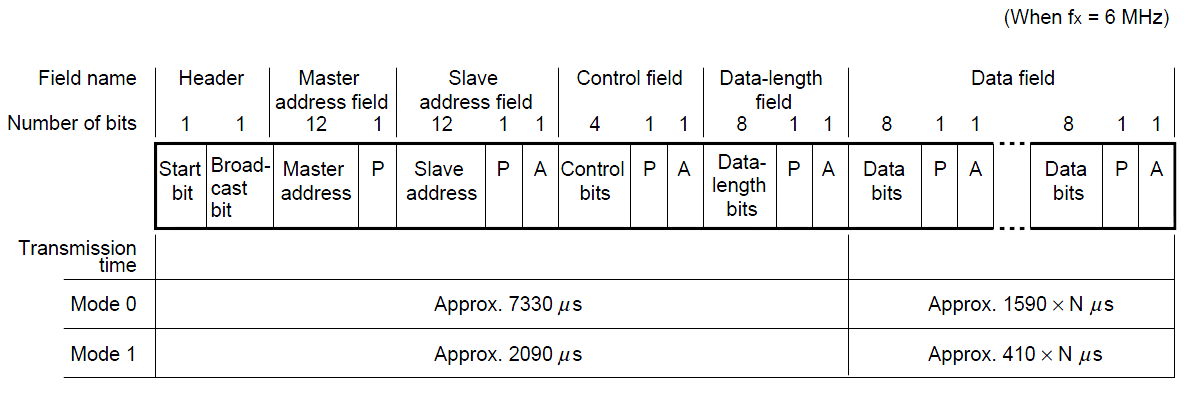
Формат передачи данных
| Количество бит | Длительность us |
Назначение | Описание |
| 193 | стартовый бит | Задает начало синхронизации данных | |
| 1 | 40 | тип передачи | 0 – широковещательная передача 1-передача конкретному устройству |
| 12 | 40*12 | Адрес передающего устройства (ведомого) | |
| 1 | 40 | Бит паритета | Паритет четности данных адреса |
| 12 | 40*12 | Адрес приемного устройства (ведущего) | |
| 1 | 40 | Бит паритета | Паритет четности данных адреса |
| 1 | 40 | Ответ приемника о получении данных | ACK – 0, NOACK – 1; |
| 4 | 40*4 | Контроль | Всегда 0xF |
| 1 | 40 | Бит паритета | Паритет четности. Всегда 0 |
| 1 | 40 | Ответ приемника о получении данных | ACK – 0, NOACK – 1; |
| 8 | 40*8 | Количество байт данных в передачи | |
| 1 | 40 | Бит паритета | |
| 1 | 40 | Ответ приемника о получении данных | ACK – 0, NOACK – 1; |
| 8 | 40*8 | Байт данных | |
| 1 | 40 | Бит паритета | |
| 1 | 40 | Ответ приемника о получении данных | ACK – 0, NOACK – 1; |
| * * * | |||
| 8 | 40*8 | Байт данных | |
| 1 | 40 | Бит паритета | |
| 1 | 40 | Ответ приемника о получении данных | ACK – 0, NOACK – 1; |
ВНИМАНИЕ далее все данные полей команд приводятся в шестнадцатеричном коде.
При широковещательной передачи передающее устройство не контролирует бит ответа от приемника, а приемные устройства его не формируют. Количество байт данных должно соответствовать байту количества передаваемых байт. Широковещательный режим используется устройствами при ответе на команду. В качестве адреса приемника, в широковещательном ответе, всегда указывается 0x1FF. Если это команда управления широковещательная, то в качестве адреса указывается 0xFFF.
Список некоторых стандартных адресов устройств.
| Адрес | Имя устройства |
| 110 | Multi Function Display (MFD) EMV |
| 118 | EMVN |
| 120 | AVX |
| 128 | 1DIN TV |
| 140 | AVN |
| 144 | G-Book |
| 160 | Audio H/U |
| 178 | Navigation (NAVI) |
| 17C | MONET |
| 17D | TEL |
| 180 | Rr-TV |
| 190 | Audio H/U |
| 19D | BT-HF |
| 1A0 | DVD-Player |
| 1AC | Camera-C |
| 1B0 | Rr-TV |
| 1C0 | Rr-CONT |
| 1C2 | TV Tuner 2 |
| 1C4 | Panel |
| 1C6 | G/W |
| 1C8 | FM-M-LCD |
| 1D6 | Clock |
| 1D8 | CONT-SW/G/W for Trip |
| 1EC | Body |
| 1F0 | Radio Tuner |
| 1F1 | XM Radio |
| 1F2 | Sirius |
| 1F4 | RSA |
| 1F6 | RSE |
| 230 | TV-Tuner |
| 238 | DTV |
| 240 | CD-CH2 |
| 250 | DVD-CH |
| 280 | Camera |
| 360 | CD-CH1 |
| 3A0 | Mini-Disk CH |
| 17D | Telephone |
| 440 | DSP-Amp |
| 480 | Amplifier |
| 530 | ETC |
| 5C8 | MAYDAY |
Некоторые логические адреса устройств
| 01 | communication ctrl | 58 | navigation ECU | 80 | GPS receiver |
| 21 | SW | 23 | SW with name | 25 | command SW |
| 12 | communication | 60 | tuner | 74 | Audio amplifier |
| 61 | tape deck | 62 | CD | 63 | CD changer |
| 34 | front passenger monitor | 24 | SW converting | 85 | voice control |
| E5 | Trip info | 55 | Bluetooth tel | 56 | information drawing |
| 5D | Climate ctrl drawing | 5E | Audio drawing | 5F | trip info drawing |
| 28 | beep dev in HU | 29 | beep via speakers | E0 | climate ctrl dev |
| 5C | camera |
Примеры команд обмена информацией
| Тип команды / ответа | Адрес передатчика | Адрес приемника | Контроль | Длина данных | Данные передачи | |||||||||||||||
| Широковещательные сообщения | ||||||||||||||||||||
| широковещательная команда(C) | перехода в режим проверки шины | |||||||||||||||||||
| 0 | 160 | FFF | F | 3 | 0 | 1 | C | |||||||||||||
| широковещательная команда(C) | выход из режима проверки шины | |||||||||||||||||||
| 0 | 160 | FFF | F | 3 | 12 | 1 | 0 | |||||||||||||
| широковещательная команда(C) | шина рестарт | |||||||||||||||||||
| 0 | 160 | FFF | F | 3 | 12 | 1 | 1 | |||||||||||||
| широковещательная команда(C) | любое устройство можно использовать | |||||||||||||||||||
| 0 | 160 | FFF | F | 3 | 12 | 1 | 46 | |||||||||||||
| широковещательная команда(C) | ID xx=60,61,62,63… логического устройство используется | |||||||||||||||||||
| 0 | 160 | FFF | F | 4 | 12 | 1 | 45 | xx | ||||||||||||
| широковещательный ответ(C) | хх = частота, уу = 0 – радио выключено, уу = 1 – радио включено | |||||||||||||||||||
| 0 | 160 | 1FF | F | D | 60 | 31 | F1 | yy | yy | 81 | xx | xx | xx | 81 | 0 | 80 | 0 | |||
| широковещательный ответ(C) | AF + REG включить | |||||||||||||||||||
| 0 | 160 | 1FF | F | D | 60 | 31 | F1 | 1 | 1 | 81 | 0 | 1 | 1 | 81 | 10 | 80 | 0 | |||
| широковещательный ответ(C) | ГРОМКОСТЬ vv=0-FF | |||||||||||||||||||
| 0 | 160 | 1FF | F | F | 74 | 31 | F1 | 90 | vv | 10 | 10 | 10 | 10 | 10 | 0 | 0 | 0 | 3 | 0 | |
| широковещательная ответ(C) | БАСС bb=0B-15 : 0B=-5, 10=0, 15=+5 | |||||||||||||||||||
| 0 | 160 | 1FF | F | F | 74 | 31 | F1 | 90 | vv | 10 | 10 | bb | 10 | 10 | 0 | 0 | 0 | 3 | 0 | |
| широковещательная ответ(C) | TREB tt=0B-15 : 0B=-5, 10=0, 15=+5 | |||||||||||||||||||
| 0 | 160 | 1FF | F | F | 74 | 31 | F1 | 90 | vv | 10 | 10 | 10 | 10 | tt | 0 | 0 | 0 | 3 | 0 | |
| широковещательная ответ(C) | FADE ff=0B-15 : 0B=F5, 10=0, 15=R5 | |||||||||||||||||||
| 0 | 160 | 1FF | F | F | 74 | 31 | F1 | 90 | vv | 10 | ff | 10 | 10 | 10 | 0 | 0 | 0 | 3 | 0 | |
| широковещательная ответ(C) | БАЛАНС bb=09-17 : 09=Left7, 10=0, 17=Right7 | |||||||||||||||||||
| 0 | 160 | 1FF | F | F | 74 | 31 | F1 | 90 | vv | bb | 10 | 10 | 10 | 10 | 0 | 0 | 0 | 3 | 0 | |
| широковещательная ответ(C) | КАССЕТА ВСТАВЛЕНА | |||||||||||||||||||
| 0 | 160 | 1FF | F | 7 | 61 | 31 | F1 | 1 | 4 | 0 | 0 | |||||||||
| широковещательный ответ(C) | КАССЕТА ПРОИГРЫВАЕТСЯ | |||||||||||||||||||
| 0 | 160 | 1FF | F | 7 | 61 | 31 | F1 | 1 | 84 | 0 | 0 | |||||||||
| широковещательный ответ(C) | ДОЛБИ ВКЛЮЧЕНО | |||||||||||||||||||
| 0 | 160 | 1FF | F | 7 | 61 | 31 | F1 | 1 | 84 | 0 | 2 | |||||||||
| широковещательный ответ(C) | ПРОПУСТИТЬ | |||||||||||||||||||
| 0 | 160 | 1FF | F | 7 | 61 | 31 | F1 | 1 | 84 | 40 | 0 | |||||||||
| широковещательный ответ(C) | РЕВЕРС | |||||||||||||||||||
| 0 | 160 | 1FF | F | 7 | 61 | 31 | F1 | 1 | 89 | 0 | 0 | |||||||||
| широковещательный ответ(C) | ПЕРЕМОТКА В ПЕРЕД | |||||||||||||||||||
| 0 | 160 | 1FF | F | 7 | 61 | 31 | F1 | 1 | 88 | 0 | 0 | |||||||||
| широковещательный ответ(C) | РЕЖИМ ПОВТОРА | |||||||||||||||||||
| 0 | 160 | 1FF | F | 7 | 61 | 31 | F1 | 1 | 84 | 10 | 0 | |||||||||
| широковещательный ответ(C) | СЛУЧАЙНОЕ ВОСПРОИЗВЕДЕНИЕ ТРЕКОВ | |||||||||||||||||||
| 0 | 160 | 1FF | F | 7 | 61 | 31 | F1 | 1 | 4 | 10 | 0 | |||||||||
| широковещательный ответ(C) | ВЫБРОС КАССЕТЫ | |||||||||||||||||||
| 0 | 160 | 1FF | F | 7 | 61 | 31 | F1 | 0 | 3 | 0 | 0 | |||||||||
| широковещательный ответ(C) | НЕТ КАССЕТЫ | |||||||||||||||||||
| 0 | 160 | 1FF | F | 7 | 61 | 31 | F1 | 0 | 0 | 0 | 0 | |||||||||
| широковещательный ответ(C) | Магнитофон не готов (??) | |||||||||||||||||||
| 0 | 160 | 1FF | F | 4 | 61 | 31 | 9F | 0 | ||||||||||||
| широковещательный ответ(C) | внутренний CD плеер не готов (??) | |||||||||||||||||||
| 0 | 160 | 1FF | F | B | 62 | 31 | F1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||||
| широковещательный ответ(C) | СТАТУС CD: ss=10-play, ss=80-load, ss=01-open, ss=02=err1, ss=03-wait dd-disc no, tt-track no, mm-play time min., ee-play time sec pp=0-normal, pp=2-disc rand, pp=4-rand,pp=8-disc rep.,pp=10-rep.,pp=20-disc scan, pp=40-scan |
|||||||||||||||||||
| 1 | 360 | 1FF | F | B | 63 | 31 | F1 | 01 | ss | dd | tt | mm | ee | pp | 80 | |||||
| Команды управления конкретному устройству | ||||||||||||||||||||
| устройство-устройство (P) | Запрос играть “Beep” dd = 1 – 4 продолжительность. Команда усилителю. | |||||||||||||||||||
| 1 | 110 | 440 | F | 5 | 0 | 5E | 29 | 60 | dd | |||||||||||
| устройство-устройство (P) | Нажать на экране xx,yy – позицию xx=0-FF, yy=0-FF | |||||||||||||||||||
| 1 | 110 | 178 | F | 8 | 0 | 21 | 24 | 78 | xx | yy | xx | yy | ||||||||
| устройство-устройство (P) | БАЛАНС перемещение d-направление d=9C верх, d=9D вниз, r=1-4 относительная позиция. | |||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | d | r | |||||||||||
| устройство-устройство (P) | БАЛАНС bb=9-17 | |||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 91 | bb | |||||||||||
| устройство-устройство (P) | ФРОНТ ff=9-17 | |||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 92 | ff | |||||||||||
| устройство-устройство (P) | БАС bb=B-15 | |||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 93 | bb | |||||||||||
| устройство-устройство (P) | СРЕДНИЕ mm=B-15 | |||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 94 | mm | |||||||||||
Список команд управления усилителем
| Описание | Команда | Параметр | ||||||||
| Воспроизвести сигнал dd=1-4 длительность | 1 | 110 | 440 | F | 5 | 00 | 5E | 29 | 60 | dd |
| Баланс bl = 09 (left) to 17 (right) | 1 | 110 | 440 | F | 5 | 00 | 25 | 74 | 91 | bl |
| Фронт fd = 09 (front) to 17 (back) | 1 | 110 | 440 | F | 5 | 00 | 25 | 74 | 92 | fd |
| Низкие bs = 0B (min) to 15 (max) | 1 | 110 | 440 | F | 5 | 00 | 25 | 74 | 93 | bs |
| Средние md = 0B (min) to 15 (max) | 1 | 110 | 440 | F | 5 | 00 | 25 | 74 | 94 | md |
| Высокие tb = 0B (min) to 15 (max) | 1 | 110 | 440 | F | 5 | 00 | 25 | 74 | 95 | tb |
| Громкость увеличение vu= 01(min) to 04(max) | 1 | 110 | 440 | F | 5 | 00 | 25 | 74 | 9C | vu |
| Громкость уменьшение vd= 01(min) to 04(max) | 1 | 110 | 440 | F | 5 | 00 | 25 | 74 | 9D | vd |
Структура управляющих команд для аудиоусилителя
| Тип команды | Адрес передатчика | Адрес приемника | Контроль | Длина данных | Логический адрес передатчика | Логический адрес приемника | Команда | Параметр | |
| 1 бит | 12+P бит | 12+P+ACK бит | 4+P+ACK бит | 8+P+ACK бит | 8+P+ACK бит | 8+P+ACK бит | 8+P+ACK бит | 8+P+ACK бит | 8+P+ACK бит |
| 1 | 190 | 440 | F | 5 | 00 | 25 | 74 | 94 | 10 |
Тип команды – 1 – обращение к конкретному устройству, 0 – широковещательная команда, Р-бит паритета формируемый передатчиком, ACK – ответ приёмника о получении данных.
Ответ аудио усилителя
| Тип команды | Адрес передатчика | Адрес приемника | Контроль | Длина данных | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 71 | 31 | А1 | 90 | УРОВЕНЬ ГРОМКОСТИ | БАЛАНС | ПОЛОЖЕНИЕ ФРОНТА | УРОВЕНЬ НИЗКИХ | УРОВЕНЬ СРЕДНИХ | УРОВЕНЬ ВЫСОКИХ | ||||||||||
Тип команды (или ответа) определяет должен ли приемник отвечать на команду битом ACK, соответственно если передатчик посылает широковещательную команду или приемник широковещательный ответ, он не контролирует ACK .
Стандартная схема подключения драйвера к шине..
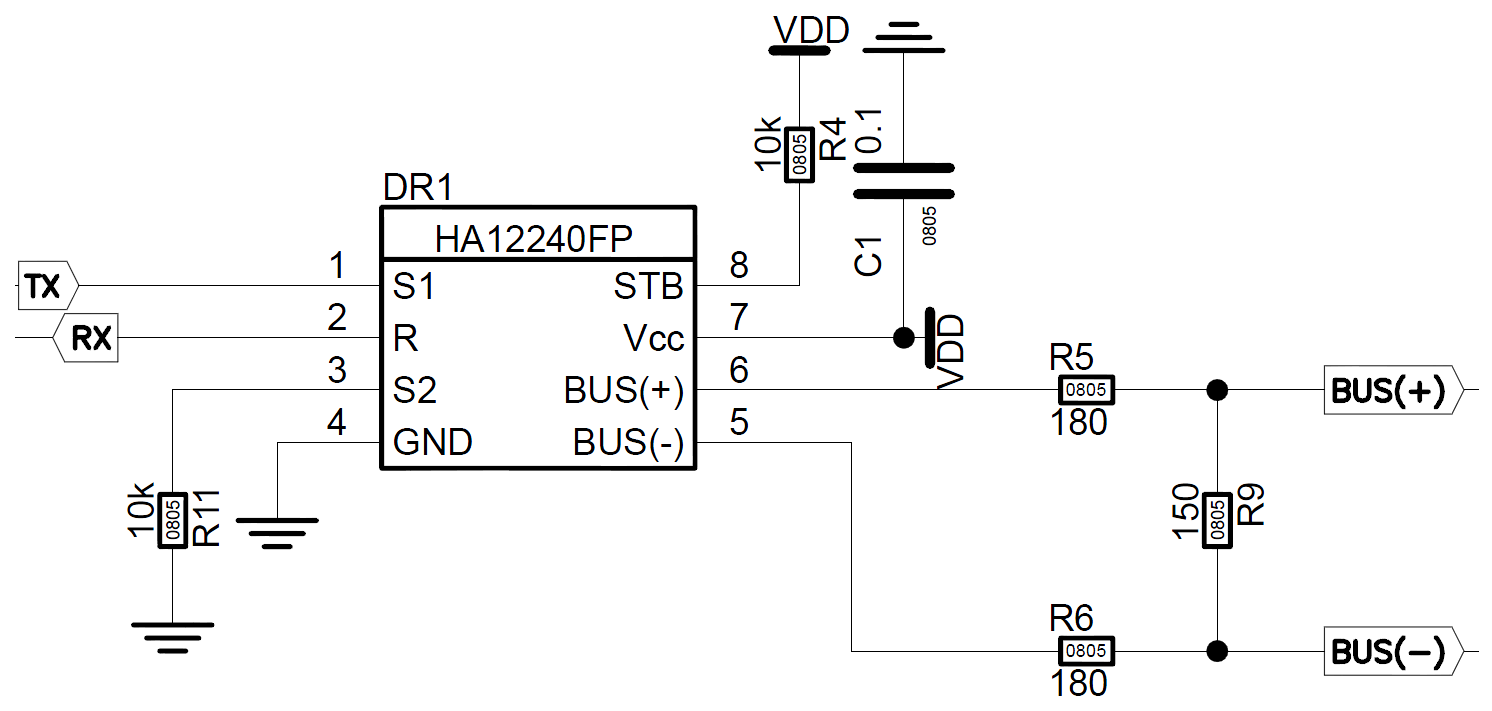
| Номер вывода | Обозначение | Функция |
| 1 | S1 | Вход, данные для передачи в шину (логическое ИЛИ с S2) |
| 2 | R | Выход, данные полученные с шины |
| 3 | S2 | Вход, данные для передачи в шину (логическое ИЛИ с S1) |
| 4 | GND | Питание, общий |
| 5 | BUS (-) | Подключение к шине AVC lan (-) |
| 6 | BUS (+) | Подключение к шине AVC lan (+) |
| 7 | Vcc | Питание плюс 5 вольт |
| 8 | STB | Вход, управление пассивным уровнем сигнала R. Если 1 пассивный низкий уровень, если 0 – пассивный высокий. |
Драйвера используемые в системах HA12187, HA12240fr…
Оборудование для тестирования.
Для изучения шины AVC LAN использовались голова TOYOTA 86120-0C191/60510 и усилитель 86280-60291. Схема подключения:
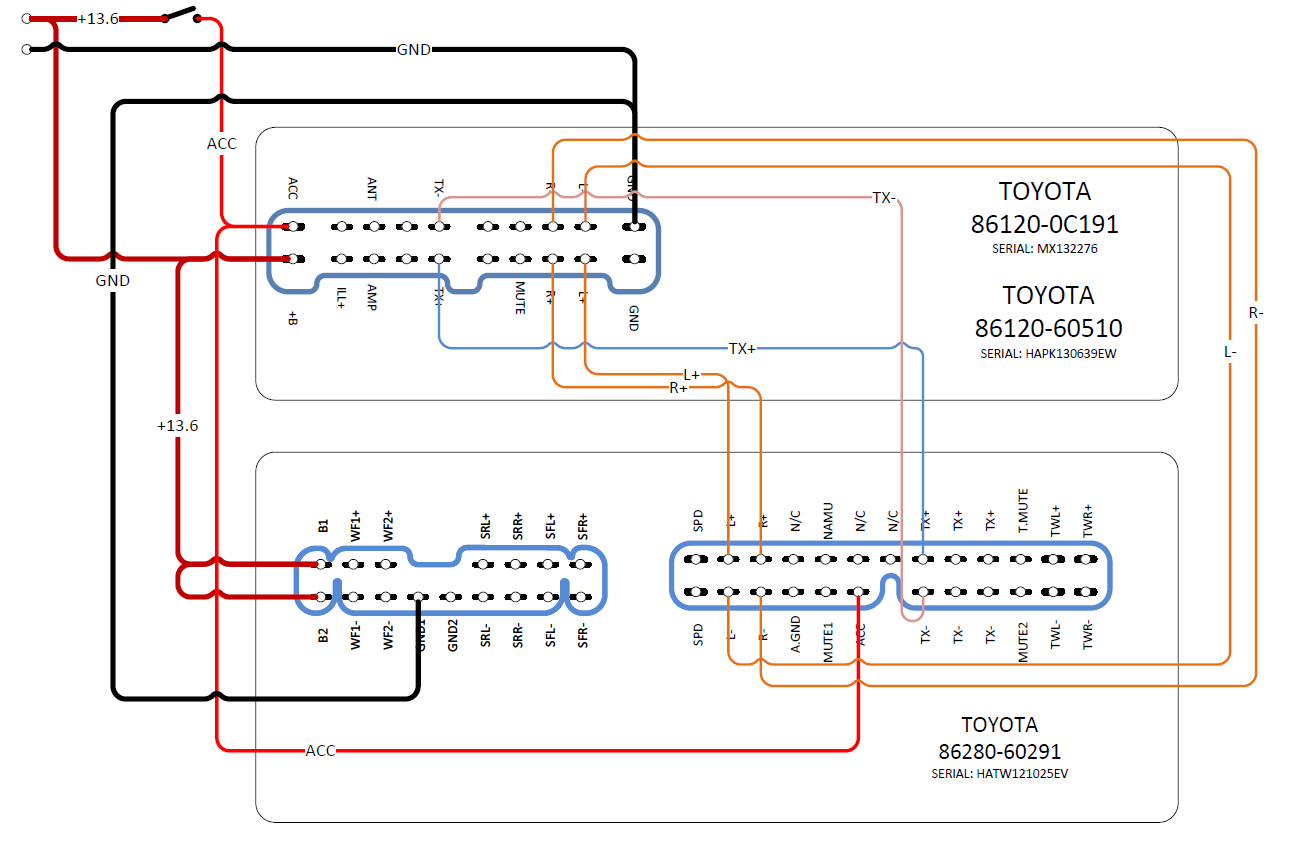
В схеме указаны, только необходимые подключения для анализа шины.
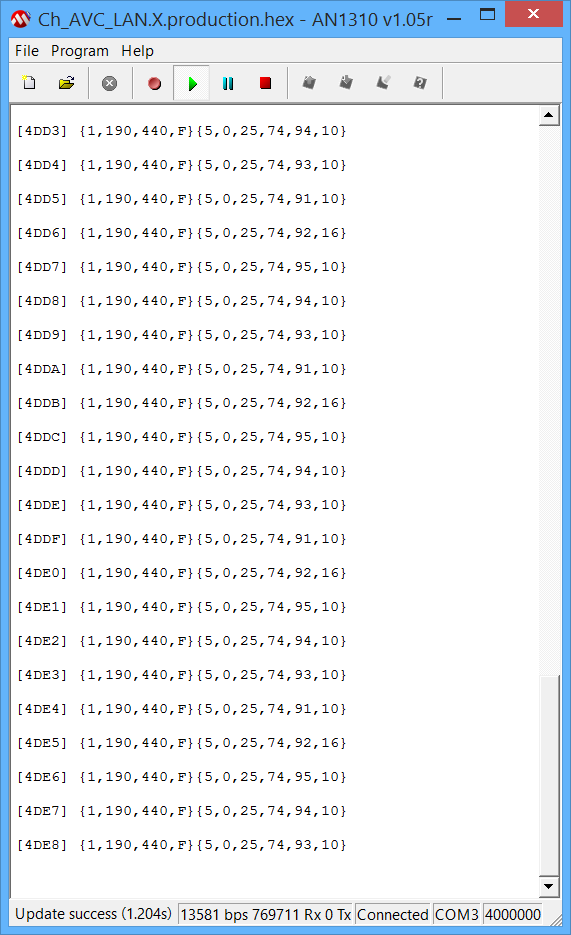
Для анализа был спроектирован сканер шины на базе платы ИЛЛИССИ (описание будет ниже). Ниже приведем коды управления усилителем (все данные в шестнадцатеричном представлении):
| Тип | Master | P | Slave | P | A | Control | P | A | Длина данных |
P | A | ?? | P | A | ?? | P | A | ?? | P | A | Команда | P | A | Параметр | P | A |
| 1 | 12 | 1 | 12 | 1 | 1 | 4 | 1 | 1 | 8 | 1 | 1 | 8 | 1 | 1 | 8 | 1 | 1 | 8 | 1 | 1 | 8 | 1 | 1 | 8 | 1 | 1 |
| Увеличение громкости на 1 | ||||||||||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 9C | 1 | |||||||||||||||||
| Уменьшение громкости на 1 | ||||||||||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 9D | 1 | |||||||||||||||||
| Регулировка низких частот +/- 5 единиц, центр 0x10 | ||||||||||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 93 | 10 | |||||||||||||||||
| Регулировка средних частот +/- 5 единиц, центр 0x10 | ||||||||||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 94 | 10 | |||||||||||||||||
| Регулировка высоких частот +/- 5 единиц, центр 0x10 | ||||||||||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 95 | 10 | |||||||||||||||||
| Регулировка фронта + 7/-7 единиц, центр 0x10 | ||||||||||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 92 | 10 | |||||||||||||||||
| Регулировка баланса +7/-7 единиц, центр 0x10 | ||||||||||||||||||||||||||
| 1 | 190 | 440 | F | 5 | 0 | 25 | 74 | 91 | 10 | |||||||||||||||||
Параметр – это управляющая величина, например, 0х10 – это значение 0, 0х11 – это значение +1, а 0х1E – это значение -1. 0х190 это физический адрес “головы”, 0х440 – это физический адрес усилителя. 0x25 и 0x74 возможно логические имена устройств соответственно.
Демо-версия сканера, (функции: индикация, перепрограммирование-обновление ПО сканера, запись потока в файл, до запись)
продолжение следует…
Это может быть интересно
 MTouch® Модуль Емкостной Библиотеки для MPLAB®X Code Configurator (MCC)Views: 1187 Введение MTouch ® Модуль Емкостной Библиотеки для MPLAB ® X Code Configurator (MCC) позволяет быстро и легко генерировать решение кода на Cи для емкостной сенсорной кнопки, датчика приближения и слайдера.
MTouch® Модуль Емкостной Библиотеки для MPLAB®X Code Configurator (MCC)Views: 1187 Введение MTouch ® Модуль Емкостной Библиотеки для MPLAB ® X Code Configurator (MCC) позволяет быстро и легко генерировать решение кода на Cи для емкостной сенсорной кнопки, датчика приближения и слайдера. Altium Designer – создание рисунков на печатной платеViews: 3260 Для создание рисунков на печатной платы в Altium Designer можно использовать возможность использовать в Altium Designer сторонних скриптов. Мне возможность эта очень понравилась и я решил её расшарить …
Altium Designer – создание рисунков на печатной платеViews: 3260 Для создание рисунков на печатной платы в Altium Designer можно использовать возможность использовать в Altium Designer сторонних скриптов. Мне возможность эта очень понравилась и я решил её расшарить … MPLAB® Code ConfiguratorViews: 1768 MPLAB ® Code конфигуратор (MCC) является свободно распространяемым плагином, это графическая среда программирования, которая генерирует бесшовный, легкий для понимания кода на Cи, чтобы вставить его в свой проект.
MPLAB® Code ConfiguratorViews: 1768 MPLAB ® Code конфигуратор (MCC) является свободно распространяемым плагином, это графическая среда программирования, которая генерирует бесшовный, легкий для понимания кода на Cи, чтобы вставить его в свой проект. LATINO – открытый проект ch-светомузыкиViews: 1653 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была …
LATINO – открытый проект ch-светомузыкиViews: 1653 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была … Инфракрасный датчик движения, PIR-sensorViews: 3078 Домашняя автоматика предполагает наличие датчиков движения, которые способны контролировать движения человека. Самым простым и доступным устройством позволяющие контролировать изменения ИК-излучения, это ПИР-сенсоры. На текущий момент доступны не дорогие модели D203B, D204B, D205B. Все …
Инфракрасный датчик движения, PIR-sensorViews: 3078 Домашняя автоматика предполагает наличие датчиков движения, которые способны контролировать движения человека. Самым простым и доступным устройством позволяющие контролировать изменения ИК-излучения, это ПИР-сенсоры. На текущий момент доступны не дорогие модели D203B, D204B, D205B. Все … MPLAB® Harmony – или как это просто! Часть 3.Views: 2081 Часть третья – копнём немного глубже. Вы наверное заметили, что во второй главе, вроде сначала все шло как по маслу, а потом, что бы заморгали светики, я вставил …
MPLAB® Harmony – или как это просто! Часть 3.Views: 2081 Часть третья – копнём немного глубже. Вы наверное заметили, что во второй главе, вроде сначала все шло как по маслу, а потом, что бы заморгали светики, я вставил … Altium Designer my Libraries, Project templates, System settings by Catcatcat V23.09Views: 303 September 2023 component base update. Release updates V. – 23_09 added new components. Changed the structure of the database. Configuration file name – DXPPreferences1.DXPPrf. Added project CLUBBEST_50_Light. …
Altium Designer my Libraries, Project templates, System settings by Catcatcat V23.09Views: 303 September 2023 component base update. Release updates V. – 23_09 added new components. Changed the structure of the database. Configuration file name – DXPPreferences1.DXPPrf. Added project CLUBBEST_50_Light. … Самый простой индикатор уровня звукового сигналаViews: 6254 Демонстрационный проект создания индикаторов уровня с использованием WS2812B. Изучив этот проект вы сможете самостоятельно изготавливать и конструировать свои индикаторы уровня звукового сигнала. Дополнительно читайте статью Бегущие огни на …
Самый простой индикатор уровня звукового сигналаViews: 6254 Демонстрационный проект создания индикаторов уровня с использованием WS2812B. Изучив этот проект вы сможете самостоятельно изготавливать и конструировать свои индикаторы уровня звукового сигнала. Дополнительно читайте статью Бегущие огни на … Обновление ESP8266 c ESPFlashDownloadTool_v3.6.3Views: 3461 Технология обновления следующая: Загружаем программу со страницы espressif.com. Разархивируем. Где находятся файлы, для прошивки? Заходим в каталоги Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка). Запускаем программу, …
Обновление ESP8266 c ESPFlashDownloadTool_v3.6.3Views: 3461 Технология обновления следующая: Загружаем программу со страницы espressif.com. Разархивируем. Где находятся файлы, для прошивки? Заходим в каталоги Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка). Запускаем программу, … Бегущие огни на WS2812BViews: 4842 В настоящее время большой популярностью стали пользоваться светодиоды со встроенным драйвером WS2812B. Текущий проект предназначен показать возможность использования и управления этими светодиодами. Это и проект и исследование по …
Бегущие огни на WS2812BViews: 4842 В настоящее время большой популярностью стали пользоваться светодиоды со встроенным драйвером WS2812B. Текущий проект предназначен показать возможность использования и управления этими светодиодами. Это и проект и исследование по …