Views: 4166

Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля и времени реакции на событие. Программная калибровка. Функция амперметра, возможность использования для преобразования напряжения шунта для индикации тока. Устройство выполнено на универсальной плате ch-4000.
Функциональная схема вольтметра.
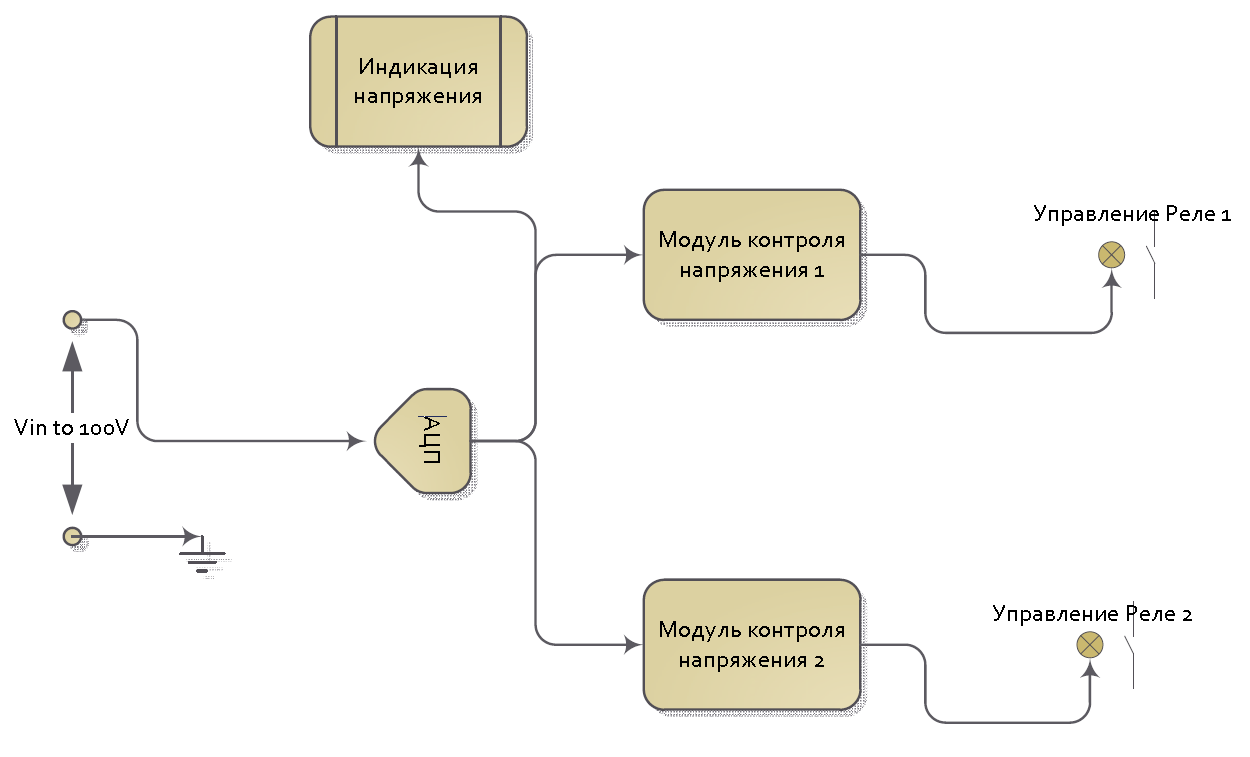
АЦП – выполняет измерение напряжения и передает данные в модуль контроля. Модули контроля позволяют выполнять контроль напряжения по 4 функциям. 1-контроль наличия напряжения в заданных пределах, если напряжение находиться внутри диапазона заданных напряжений реле замкнуто. 2 – контроль выхода напряжение за установленные границы. Если напряжение выше или ниже заданных параметров – реле замкнуто. 3 – реле замкнуто если напряжение ниже минимального уровня и отключено если выше максимального. 4-реле замкнуто если напряжение выше максимального уровня и разомкнуто если напряжение ниже минимального уровня.
Схема вольтметра.
Это конфигурации платы для функции аналогового входа. Это вариант для простого вольтметра с одним диапазоном от 0,01 до 10.00 вольт, если R1=180 k, R3=20k (1/10). Если удалить R3, будет диапазон от 0,001 до 1,000 вольта. Если R1=180 k, а R3=1,8 k, это будет 1/100 диапазон от 0,1 до 100,0 вольт.

Но плата позволяет сделать 2 автоматических диапазона, ну а если и еще извратиться (бросить проводок), то трех диапазонный. проблема только в том, что логический ноль на выходе контроллера не совсем ноль, это уровень порядка до 20 милливольт, но это терпимо, для диапазон измерения до 10 и 100 вольт. Эти вносимые погрешности можно программно скомпенсировать.
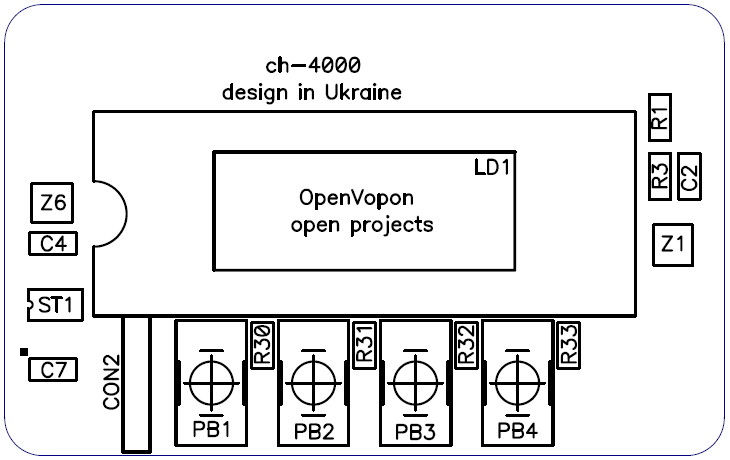
Монтажная схема платы.
Оставлены только используемые компоненты. Расположение элементов на верней стороне платы.
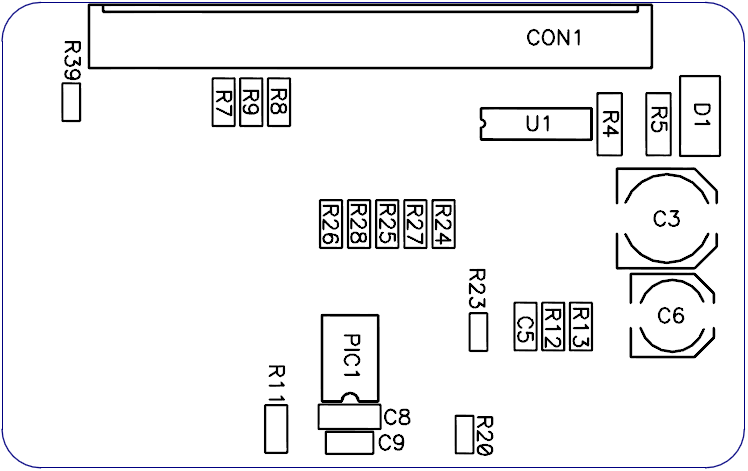
Расположение элементов на нижней стороне платы.
Перечень элементов необходимых для сборки.
| Наименование | Типоразмер | Тип (замена) | Количество | Примечание |
| Микроконтроллер | SSOP | PIC16F1829 | 1 | PIC1 |
| Стабилизатор | SO-8 | 78L05 | 1 | ST1 |
| Ключи | SO-14 | ULN2003D | 1 | U1 |
| Индикатор | SR410561N/32 | 1 | LD1 | |
| Диод | SM4007 | 1 | D1 | |
| Резистор | 1206 | 0 | 1 | R4 |
| Резистор | 1206 | 22 | 1 | R5 |
| Резистор | 0805 | 680 | 8 | R7,R8,R9,R24, R25,R26,R27,R28 |
| Резистор | 0805 | 1K | 4 | R30,R31,R32,R33 |
| Резистор | 0805 | 10K | 1 | R12 |
| Резистор | 0805 | 180K | 1 | R1 |
| Резистор | 0805 | 1.8K | 1 | R13 |
| CHIP BEADS | 0805 | LCBB-601 | 1 | R11 |
| Резистор | 0603 | 0 | 1 | R37,R39 |
| Конденсатор | 0805 | 0.1x50v | 3 | C4,C7,C5 |
| Тактовая кнопка | SMD | TACT 6×6-15.0 | 4 | PB1-PB4 |
| Конденсатор керамический | 1206 | 10,0х25v | 1 | C8 |
| Конденсатор электролитический | 220,0х25v | 1 | C3 | |
| Конденсатор электролитический | 100,0х16v | 1 | C6 | |
| Стабилитрон | SOT23 | BZX84-C5V1 | 1 | Z1 |
| Стабилитрон | SOT23 | BZX84-C30 | 1 | Z6 |
Проблема простоты и точности.
Первая простота заключена в самом микроконтроллере. в нем встроен источник опорного напряжения, который позволяет нам получить опорное напряжение 1024 милливольта. Т.е. мы сразу имеем точный отсчет. Это даст без преобразования измерять, просто подавая на вход контролера напряжения от 0,001 до 1,000 вольта.
Простота конструкции не дает возможности сделать высокую точность измерения. Дело в том, что на уровне 1 милливольта всегда присутствуют электронаводки от радио и электросети. Тем более в этом микроконтроллере нет отдельных цепей для аналоговой части, и здесь будет проблематично выполнить измерения в спящем режиме, так как динамическая индикация требует, чтобы контроллер был всегда в работе, ну и плюс цифровой шум, от самого контроллера будет мешать точности измерения. Но микроконтроллер и для того называется микроконтроллером, что здесь есть много вариантов для программной обработки данных.
Для удешевления конструкции мы используем в делители обычные резисторы с 5% допуском, это нам добавит нелинейности которую необходимо будет скорректировать программно, эта функция и функция коррекции нуля на уровнях 10 и 100, реализовано в режиме настройки.
Для реализации механизма устранения “блыманья” надо будет применить три метода, что-бы получить индикацию приемлемого вида.
Для борьбы с помехами мы применим три метода
- Вычисление среднего из N – измерений.
- Применение “накапливающего интегратора”.
- Поиск минимального сигнала в циклах “накапливающего интегратора”.
Что дает каждый метод в отдельности.
1. Вычисление среднего их N – измерений. Позволяет выполнить несколько измерений и найти среднее значение, что естественно “сгладит” поверхностные пульсации вызванные электронаводками и цифровым шумом.
if(GO==0)
{
//------------------------------------------
volt[ctetizm]=ADRESL; // чтение данных их АЦП
volt[ctetizm]+=ADRESH<<8; // ADC data read them
if(++ctetizm>IZMR)ctetizm=0;
GO=1; // запуск измерения/start of measurement
voltage=0;
for(a=0;a<IZMR;a++)
{
voltage+=volt[a];
}
voltage=voltage/IZMR;
if(voltage<voltageMIN)voltageMIN=voltage;
2. Применение “накапливающего интегратора”. Позволит выполнять смену индикации напряжения с “первого” показания (которое в настоящий момент на индикаторе) на “второе” (которое подготовлено блоком обработки сигнала), когда “второе” встречается в N раз чаще чем “первое”.
// ФИЛЬТР устранения дрожания индикации при смене напряжения "накапливающий интегратор"
// FILTER jitter display by changing the voltage to "accumulate integrator"
if(voltage!=voltager && timery)timery--;
else
{
voltager=voltageMIN;
timery=500; // нельзя делать очень большим, появится эффект тригерности
voltageMIN=1023;
}
3. Поиск минимального сигнала в циклах “накапливающего интегратора”. Будут выводить на индикатор минимальное значение, что как показала практика, является более достоверным. А так-ка поиск минимума, должен происходить не во всем времени, а только в моменты периода работы “накапливающего интегратора”, то как раз в эти моменты будет происходить сброс минимума текущего измерения. Сброс будет выполняться к максимальному значению АЦП.
Для автоматического выбора пределов используем условие превышения уровня сигнала выше 1000, для возврата на уровень ниже если ниже 99. Для предотвращения перепрыгивания на уровень выше необходимо сбросить уровень сигнала в буфере на среднее значение.
// функция автоматического переключения на нужный уровень
if(voltage>1000&&tochraraz==1)
{
// выбор уровня 2
LEVEL01=0;
LEVEL02=1;
tochraraz=2;
for(a=0;a<IZMR;a++)// сброс значение в среднее хначение
{
volt[a]=200;
}
}
else if(voltage>1000&&tochraraz==2)
{
// выбор уровня 3
LEVEL01=1;
LEVEL02=0;
tochraraz=3;
for(a=0;a<IZMR;a++)// сброс измерение в среднее значение
{
volt[a]=200;
}
}
else if(voltage<99&&tochraraz==3)
{
// выбор уровня 2
LEVEL01=0;
LEVEL02=1;
tochraraz=2;
for(a=0;a<IZMR;a++)// сброс измерение в среднее значение
{
volt[a]=200;
}
}
else if(voltage<99&&tochraraz==2)
{
LEVEL01=1;
LEVEL02=1;
tochraraz=1;
for(a=0;a<IZMR;a++)// сброс измерение в среднее значение
{
volt[a]=200;
}
}
Расширение функций.
Простое измерение напряжения – малофункционально, поэтому в вольтметре предусмотрено два модуля для контроля напряжения. (для варианта трехдиапазонного измерителя, если использовать один диапазон, то можно сделать 4 управляющих выхода). Функция таймера задержи включения работы модулей-регуляторов, которые задерживают работу модулей от момента включения или изменения параметров настройки.
Описание назначений клавиш управления.
Позиционное расположение клавиш:
[←][→][↓][↑]
Основной режим работы:
[←] выключение или уменьшение задания таймера.
[→] запуск таймера и задание времени его работы.
[↓] вход в режим настройки параметров милливольтметра.
[↑] выбор предела измерений (АВТО/0,000/00,00/000,0).
Режим ввода пароля:
Сообщение [PASS] предупреждает о необходимости ввода пароля. Сообщение [0.000] говорит от необходимости ввода пароля. Клавишей [→] выбираем разряд в который необходимо ввести число. Клавишей [←] вводится число, диапазон вводимого числа 0-9, A, B, C, D, E, F, G, H. Цифры выбираются последовательно и повторяются по кругу. При вводе пароля нажать клавишу [↓] – для перехода на уровень программирования функций. Каждый уровень имеет свой индивидуальный пароль. Если пароль введен, то до входа в основной режим работы, при движении по уровням, пароль в дальнейшем вводить не надо.
Режим настройки параметров:
[←] выбор функций на уровне функций, уменьшение задания параметра на уровне параметра функции.
[→] выбор функций на уровне функций, увеличение задания параметра на уровне параметра функции.
[↓] вход/выход в режим настройки параметра или переход на уровень ниже.
[↑] выход из режима настройки или настройки параметра функции.
Продолжение следует…
Схемы в формате pdf
Простой цифровой милливольтметр постоянного тока - cхемы формате pdf 27.29 KB 910 downloads
Простой цифровой милливольтметр постоянного...Предварительная прошивка для тестирование, функции измерения и регулирования полностью работают, мастер пароль для всех уровней “1000”
Простой цифровой милливольтметр постоянного тока - прошивка beta 9.67 KB 763 downloads
Простой цифровой милливольтметр постоянного...Это может быть интересно
 Customs codes for exportViews: 261 Митні коди (HS Code) для надсилання посилок за кордон. Для відправки товару за кордон на сьогодні необхідно зазначати митні коди. Часто визначення коду займає багато часу. Для …
Customs codes for exportViews: 261 Митні коди (HS Code) для надсилання посилок за кордон. Для відправки товару за кордон на сьогодні необхідно зазначати митні коди. Часто визначення коду займає багато часу. Для …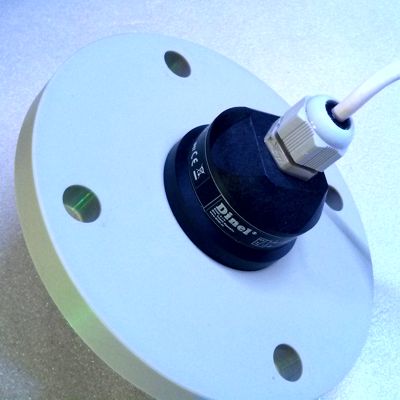 Ultrasonic Level Meters – ULM –53LViews: 763 Измерение расстояния при помощи ультра звукового датчика ULM–53L–10. Диапазон измерения от 0,5 м до 10 м, полностью пластмассовый излучатель PVDF, механическое соединение фланцем из полиэтилена HDPE (исполнение “N”) Характеристики …
Ultrasonic Level Meters – ULM –53LViews: 763 Измерение расстояния при помощи ультра звукового датчика ULM–53L–10. Диапазон измерения от 0,5 м до 10 м, полностью пластмассовый излучатель PVDF, механическое соединение фланцем из полиэтилена HDPE (исполнение “N”) Характеристики … Arduino LCD + STONE STVI056WT-01 + Strain gaugeViews: 574 Author li grey email: greyli1987@outlook.com The strain assessment instrument is used to assess the degree of corresponding muscle strain by obtaining the muscle surface action potential through silver …
Arduino LCD + STONE STVI056WT-01 + Strain gaugeViews: 574 Author li grey email: greyli1987@outlook.com The strain assessment instrument is used to assess the degree of corresponding muscle strain by obtaining the muscle surface action potential through silver … MPLAB X IDE – управление проектамиViews: 1076 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора …
MPLAB X IDE – управление проектамиViews: 1076 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора … Защита датчиков температуры DS18B20 от статического электричестваViews: 1938 Статья перепечатана с сайта http://svetomuzyka.narod.ru При удалении датчика на большие расстояния возникает опасность наведения импульсов высокого напряжения на кабель, который соединяет датчик с контролером. Если не принимать меры защиты, …
Защита датчиков температуры DS18B20 от статического электричестваViews: 1938 Статья перепечатана с сайта http://svetomuzyka.narod.ru При удалении датчика на большие расстояния возникает опасность наведения импульсов высокого напряжения на кабель, который соединяет датчик с контролером. Если не принимать меры защиты, … Мониторинг температурыViews: 1440 Настоящий проект создан как обучающий с применением библиотек ds18b20 и LCDHD44780 и компилятора Microchip MPLAB XC8 C Compiler V1.12. Если необходимо иметь информацию по состоянию температуры в помещении или в здании, с количеством до 6 точек (16), то …
Мониторинг температурыViews: 1440 Настоящий проект создан как обучающий с применением библиотек ds18b20 и LCDHD44780 и компилятора Microchip MPLAB XC8 C Compiler V1.12. Если необходимо иметь информацию по состоянию температуры в помещении или в здании, с количеством до 6 точек (16), то … Цифровой спидометр для автомобиляViews: 10271 Универсальность печатной платы ch-c0030pcb позволяет создавать на её основе разнообразные устройства. Одним из таких устройств является электронный спидометр для автомобиля, в котором можно задать два компаратора скорости, например, для …
Цифровой спидометр для автомобиляViews: 10271 Универсальность печатной платы ch-c0030pcb позволяет создавать на её основе разнообразные устройства. Одним из таких устройств является электронный спидометр для автомобиля, в котором можно задать два компаратора скорости, например, для … LED модуль P10 (1R) V706AViews: 7864 Это еще одно чудо от китайского брата. Это монохромные матрицы, называются они P10 (1R) V706A, ну типа R-красные, но не верьте паяют светики и зеленые и синие, в общем …
LED модуль P10 (1R) V706AViews: 7864 Это еще одно чудо от китайского брата. Это монохромные матрицы, называются они P10 (1R) V706A, ну типа R-красные, но не верьте паяют светики и зеленые и синие, в общем … PIC18 – модуль DMAViews: 1284 Введение Модуль прямого доступа к памяти (DMA) предназначен для обслуживания передачи данных непосредственно между различными областями памяти без вмешательства процессора. Исключив при этом необходимость в интенсивной обработки …
PIC18 – модуль DMAViews: 1284 Введение Модуль прямого доступа к памяти (DMA) предназначен для обслуживания передачи данных непосредственно между различными областями памяти без вмешательства процессора. Исключив при этом необходимость в интенсивной обработки … Development board based on MCU PIC18F47Q84Views: 1724 PIC18F47Q84 Microcontroller Family with CAN Flexible Data Status: In Production.
Development board based on MCU PIC18F47Q84Views: 1724 PIC18F47Q84 Microcontroller Family with CAN Flexible Data Status: In Production.