
Views: 1575
Использование модуля ССР для декодирования команд
ИК пульта – APA1616.
Для управление домашней автоматикой удобно использовать недорогие пульты дистанционного управления на ИК-лучах.

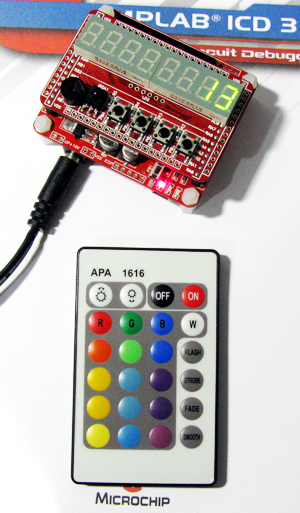
Пульт простой, компактный, экономичный питание одна батарейка 3,3 V CR2025. Рассмотрим передачу пульта:

Начитается передача с формирования синхро импульса, длительность его 13 мс, длительность передачи 0 – 1,14 мс, 1 – 2,23 мс. Кодируется просто начало бита (или синхроимпульса) это отрицательный перепад. Для декодирования необходимо синхронизироваться от отрицательного перепада и измерять длительность. В передачи три байта (24 бита). Информационный последний байт. После передачи команды передается код автоповтора – бит длительностью 11 мс.
![]()
Логика декодирования проста. Ждем отрицательный перепад, измеряем длительность, далее проверяем если длительность больше 13 мс. Это синхробайт. Если больше 10 мс – это автоповтор. Если больше 1,9 мс – передача бита 1. Если больше 0,9 мс – передача – 0.
Декодирование выполним при помощи модуля CCP работающего в режиме ЗАХВАТА.
Настройка модуля, для измерения выберем CCP4:
T1CON=0b00110001; // настройка таймера T1CON
// |||||| |
// |||||| +-- TMR1ON таймер включить
// |||||+---- T1SYNC синхронизация отключена
// ||||+----- T1OSCEN генератор отключен
// ||++------ T1CKPS настройка предделителя 00 - 1:1
// ++-------- TMR1CS выбор тактовой частоты FOSC
CCP4CON=0b00000100; // вход RB0
// ++++-- CCPxM<3:0>: режим работы - Capture mode: every falling edge
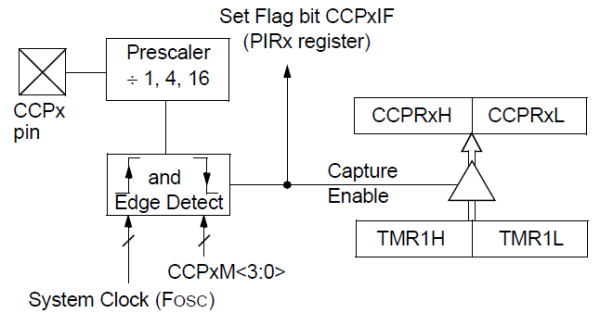
По каждому отрицательному перепаду формируется прерывание, в этот все необходимые измерения и вычисления.
void interrupt my_isr(void) // высоко приоритетное прерывание
{
if(CCP4IF)//
{
CCP4IF=0; // сброс вектора прерывания.
pwm_reg=TMR1L;
pwm_reg += TMR1H << 8;
TMR1L=0;
TMR1H=0;
if(pwm_reg>12000&&TMR1IF)// передача синхроимпульса должна сопровождаться переполнением таймера
{
chetchic=24;//счетчик бит (3 байта 8*3=24)
TMR1IF=0;
}
else
if (pwm_reg>10000)// передача "бита автоповтора"
{
AUTO=1;
}
else
if (pwm_reg>1900&&chetchic>0) // передача "1"
{
bait01>>=1;
bait01 |= 0b10000000;
chetchic--;//подсчет принятых бит
if(!chetchic&&bait01<24)PRIEM=1;// установить флаг команда принята если переданы все 24 бита и полученные данные меньше 24
}
else
if (pwm_reg>900&&chetchic>0)// передача "0"
{
bait01>>=1;
chetchic--;//подсчет принятых бит
if(!chetchic&&bait01<24)PRIEM=1;// установить флаг команда принята если переданы все 24 бита и полученные данные меньше 24
}
}
}//
При получении прерывания от CCP модуля, считываем значение с Таймера, сбрасываем его. Полученную длительность с модуля CCP сравниваем с заранее выбранными параметрами.
Для индикации принятой команды используется главный цикл программы.
while(1)
{
CLRWDT(); // сброс сторожевого таймера
//-----------------------------------------------------------
if(PRIEM) // если передача получена, вывести индикацию
{
PRIEM=0;
bin_dec (bait01,0);// преобразование для индикации
indic (dmil,miln,stys,dtys,tysc,sotn,dest,edin,0); // вывод значения на дисплей
}
if(AUTO)
{
AUTO=0;
indic (cP,co,0,0,0,0,dest,edin,0); // вывод значения на дисплей передачи автоповтора
__delay_ms(30);
indic (dmil,miln,stys,dtys,tysc,sotn,dest,edin,0); // вывод значения на дисплей
}
__delay_ms (20);// это так для прикола
}
Для демонстрации используется ИК порт платы ILLISSI-4С-01-secundo. На ней установлен ИК-приемник с несущей 36 кГц. Хотя пульт использует несущую в 38 кГц. прием вполне приемлемый и габаритах обычной квартиры до 10 метров в прямой видимости работает отлично. При расстоянии до 5 метров возможен уверенный прием и при отраженном сигнале. Если необходима большая чувствительность то рекомендуется применить приемник с несущей 38 кГц.
Для демо примера используются сборка из плат ILLISSI-4B-03-primum и ILLISSI-4С-01-secundo.
Кодировка пульта простая, в нем 24 клавиши, коды с 0 до 23. Соответствие кодов клавишам.
00 – 01 – 02 – 03
04 – 05 – 06 – 07
08 – 09 – 10 – 11
12 – 13 – 14 – 15
16 – 17 – 18 – 19
20 – 21 – 22 – 23
Фото проекта
Видео проекта
Файлы проекта
Версия – 1.1
Применение модуля ССР в режиме захвата - v1.1 29.14 KB 785 downloads
Использование модуля ССР для декодирования...Применение модуля ССР в режиме захвата - v1.4 20.67 KB 896 downloads
Использование модуля ССР для декодирования...Это может быть интересно
 LCD драйвер – UC1601sViews: 1839 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG.
LCD драйвер – UC1601sViews: 1839 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG. LED модуль P10C4V12Views: 3327 LED панели на обычных регистрах типа 74HC595. Они выпускаются как монохромные так двух и полно цветные, особенность, что они предназначены для текстовой информации и имеют один уровень яркости. Общую яркость …
LED модуль P10C4V12Views: 3327 LED панели на обычных регистрах типа 74HC595. Они выпускаются как монохромные так двух и полно цветные, особенность, что они предназначены для текстовой информации и имеют один уровень яркости. Общую яркость … Moving average – скользящее среднееViews: 2473 Скользящая средняя, скользящее среднее (англ. moving average, MA) — общее название для семейства функций, значения которых в каждой точке определения равны среднему значению исходной функции за предыдущий период. Скользящие средние обычно используются с данными временных рядов для сглаживания …
Moving average – скользящее среднееViews: 2473 Скользящая средняя, скользящее среднее (англ. moving average, MA) — общее название для семейства функций, значения которых в каждой точке определения равны среднему значению исходной функции за предыдущий период. Скользящие средние обычно используются с данными временных рядов для сглаживания … УКВ – радиоприем, часть 2Views: 6446 Пришло свободное время решил вторую часть проекта реализовать (правда есть мысль и третью с использование цветного OLED и функцией ch-светомузыки, но это только задумка… Для понимания функций интегрального …
УКВ – радиоприем, часть 2Views: 6446 Пришло свободное время решил вторую часть проекта реализовать (правда есть мысль и третью с использование цветного OLED и функцией ch-светомузыки, но это только задумка… Для понимания функций интегрального … Применение typedef, struct и unionViews: 8923 Полезные описания переменных Часто необходимо в памяти расположить последовательно разные виды данных, что бы потом можно было их использовать. Полезные ссылки Взято и переработано с сайта http://www.butovo.com/~zss/cpp/struct.htm http://cppstudio.com/post/9172/ …
Применение typedef, struct и unionViews: 8923 Полезные описания переменных Часто необходимо в памяти расположить последовательно разные виды данных, что бы потом можно было их использовать. Полезные ссылки Взято и переработано с сайта http://www.butovo.com/~zss/cpp/struct.htm http://cppstudio.com/post/9172/ … Униполярный шаговый двигатель – часть 2Views: 1062 В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима. В …
Униполярный шаговый двигатель – часть 2Views: 1062 В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима. В … Самый простой диммер для светодиодного освещенияViews: 3212 Светодиоды все больше входят в нашу жизнь как источники освещения и как само собой разумеющееся, это вопрос регулировки яркости. Существует множество схемных решений, но в нашем варианте мы …
Самый простой диммер для светодиодного освещенияViews: 3212 Светодиоды все больше входят в нашу жизнь как источники освещения и как само собой разумеющееся, это вопрос регулировки яркости. Существует множество схемных решений, но в нашем варианте мы … Простой цифровой вольтметр ch-c3200Views: 2687 В этой статье рассмотрен пример создания простого вольтметра постоянного тока на основе печатной платы ch-c0030pcb, а при возможности использования внешнего делителя и вольтметр переменного тока. Дан краткий принцип …
Простой цифровой вольтметр ch-c3200Views: 2687 В этой статье рассмотрен пример создания простого вольтметра постоянного тока на основе печатной платы ch-c0030pcb, а при возможности использования внешнего делителя и вольтметр переменного тока. Дан краткий принцип … CAN – Controller Area NetworkViews: 1267 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, …
CAN – Controller Area NetworkViews: 1267 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, … Датчик контроля протечки воды ch-c0020Views: 2131 Как здорово летом под теплым дождем с тобою вдвоем оказаться. Как классно по лужам бежать босиком, с тобою играть и смеяться! Но совсем грустно оказаться под таким дождем, который течет с …
Датчик контроля протечки воды ch-c0020Views: 2131 Как здорово летом под теплым дождем с тобою вдвоем оказаться. Как классно по лужам бежать босиком, с тобою играть и смеяться! Но совсем грустно оказаться под таким дождем, который течет с …