
Views: 490
Дистанционное управление для устройств на микроконтроллерах.
Самый простой вариант это приобрести понравившийся пульт ДУ на ИК и сделать дистанционное управление.
Для этого необходим приемник ИК, желательно выбирать с чтобы совпадала частота несущей, но если даже у вас есть в наличии на 38, а руль с несущей на 38 кГц, все равно работать будет, просто уменьшиться дальность, например при всех идеальных условиях можно управлять с расстоянии более 60 метров, а при всех неблагоприятных не более 10-15.
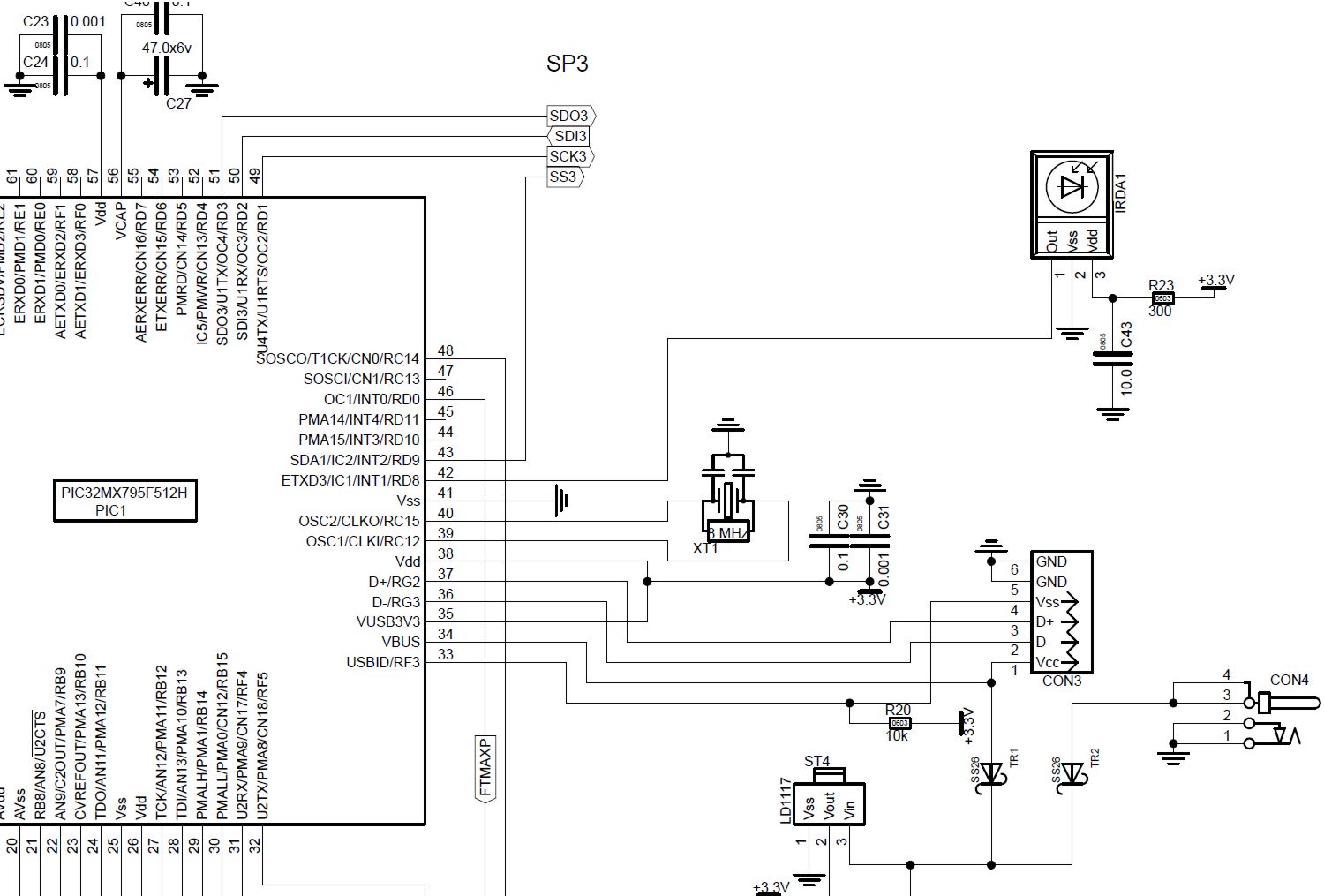
Для декодирования сигналов мы подключаем приемник на прямую на вход INT1 микроконтроллера
И как только это сделано, надо в программу добавить функции обработки. Для обработки мы будем использовать коды типа NEC
это стандартные коды несущие 32 бита данных.
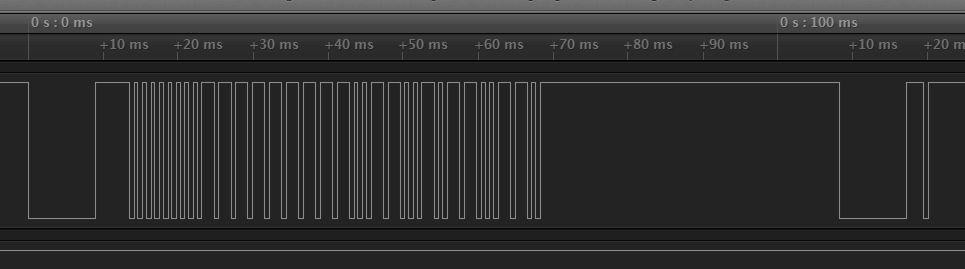
Принцип работы будет следующий мы используем свойство микроконтроллера для обработки внешних прерываний по входам. Используем вход INT1 и настраиваем, чтобы он формировал прерывания по срезу импульсов. Т.е. в приемниках всегда есть подтяжка (30-50 кОм) и пассивный уровень высокий, при получении модулированного импульса на выходе же формируется низкий уровень. Нам необходимо в момент получения от входа прерывания сосчитать данные с таймера (затем таймер обнулить для подготовки изменения следующего импульса) проверить длительность и по параметрам этой длительности определить это преамбула (начала передачи) или это передача бита ноль, единицы или это код автоповтора (удержание клавиши).
Принцип описан, теперь настройка:
// Настройка прерывания по входу INT1 – External Interrupt 1, вход RD8, ДУ - ИК
INTCONbits.INT1EP = 0; // External Interrupt 1 Edge Polarity Control bit 0 = Falling edge
IPC1bits.INT1IP = 7; // уровень приоритета
IPC1bits.INT1IS = 1; // уровень суб приоритета
IFS0bits.INT1IF = 0; // сбросить флаг прерывания по входу INT1
IEC0bits.INT1IE = 1; // разрешить прерывание по входу INT1
Далее необходимо настроить таймер, он же измеряет время, хочу уточнить, все параметры приведены для тактовой 80 МГц, она же и поступает на периферийные устройства микроконтроллера, и от нее и тактируется таймер.
Настройка таймера
// Настройка таймера Т4 для измерение длительности
T4CON = 0x0; //
PR4 = 0xFFFF; // 6250-200 Гц настройка периода - тактирование
T4CONbits.TCKPS = 0b110; // 111 = 1:256 prescale value
T4CONbits.ON = 1; // включить
// Настройка для таймера 4 прерывания
IPC4bits.T4IP=5; // приоритет 5
IPC4bits.T4IS=3; // суб приоритет уровень 3
IFS0bits.T4IF=0; // сбросить флаг прерывания.
IEC0bits.T4IE=1; // разрешить прерывания от Т1
Самое главное по приоритету, прерывания по входу INT1 должны иметь наивысший приоритет!
Далее программе мы должны включить прерывания и включить мультивекторный режим
// настройка прерываний
INTCONbits.MVEC=1; // включить мульти векторный режим
__builtin_enable_interrupts(); // разрешить прерывания
Теперь вернемся в начало и опишем переменные и флаги управления, это необходимо понимать как функции прерывания будут возвращать в основную программу полученные коды (команды).
// переменные флаги модуля управления с ДУ
// флаги ДУ
volatile struct
{
unsigned NACH : 1; // флаг ожидания ИК команды, устанавливается по переполнению таймера
unsigned POV : 1; // флаг ожидания кодов автоповтора, после приема команды
unsigned PRIEM : 1; // флаг данные готовы, устанавливается когда ИК команда принята
unsigned AUPOV : 1; // флаг автоповтор, удержание клавиши на пульте
}flagIK;
unsigned long chetchic; // счетчик полученных бит
unsigned long data_IK; // код полученной команды, действителен после установки флага PRIEM
unsigned long timeautIK; // таймер установки времени после которого разрешено подача следующей команды
надеюсь с комментов все понятно.
И сами функции прерываний, обработка построена самой возможной простотой и вариантом некоторой степени помехозащищенности, от ИК помех.
Обработка и получение данных
#define CLOBIT 32 // количество бит в передаче
// обработка прерывания по входу INT1
void __ISR(7,ipl7srs) INT1Interrupt (void)
{
unsigned long pwm_reg;
pwm_reg = TMR4; // загрузить значение длительности
TMR4=0; // обнулить таймер
if(pwm_reg>16750&&pwm_reg<17000&&flagIK.NACH) // передача синхроимпульса должна сопровождаться переполнением таймера
{
chetchic=CLOBIT; //счетчик бит (3 байта 8*3=24)
flagIK.NACH=0;
}
else
if (pwm_reg>13750&&pwm_reg<15000&&flagIK.POV) // передача "бита автоповтора"
{
timeautIK=5; // инициализация таймера таймаута
LATBINV = 0b0001000000000000; // мигание светодиода - индикатор для тестирования
flagIK.AUPOV=1; // флаг получение кода автоповтора
}
else
if (pwm_reg>2625&&pwm_reg<2875&&chetchic>0) // передача "1"
{
data_IK<<=1; // выполнить сдвиг
data_IK |= 1; // установить единицу
chetchic--; // подсчет принятых бит
if(!chetchic){flagIK.PRIEM=1;flagIK.POV=1;} // 32 установить флаг команда принята если переданы все 32 бита
}
else
if (pwm_reg>1250&&pwm_reg<1500&&chetchic>0) // передача "0"
{
data_IK<<=1; // выполнить сдвиг (подразумевается запись 0)
chetchic--; //подсчет принятых бит
if(!chetchic){flagIK.PRIEM=1;flagIK.POV=1;} // установить флаг команда принята если переданы все 32 бита
}
else // помеха
{
flagIK.NACH=1; //
chetchic=0; //
}
IFS0bits.INT1IF = 0; // сбросить флаг прерывания по входу INT1
}
Вкратце, “получаем” прерывание, считываем значение из таймера и обнуляем его, пусть меряет следующий импульс. Полученную длительность сравниваем с 4-мя вариантами допусков и в зависимости от того куда эта длительность просочилась, делаем соответствующие тело движения.
Обработка прерывания от таймер, тут необходимая функция это помехозащищенность, он дает разрешение на по таймАУТУ на прием следующей команды и также сбрасывает прием если при приеме не поступило 32 бита.
// обработка прерывание от таймера 4
void __ISR(16,ipl5soft) T4Interrupt (void)
{
if(--timeautIK==0)flagIK.NACH=1; // установит флаг готовноть приема IK команды
chetchic=0; // обнулить счетчик
LATBCLR = 0b0001000000000000; // сбросить флаг индикации
flagIK.AUPOV=0; // флаг получение кода автоповтора
IFS0bits.T4IF=0; // сбросить флаг прерывания.
}
Теперь, что делать в основной программе? В основной программе надо ждать установки флага flagIK.PRIEM=1, если флаг установлен произвести обработка данных помещенных в переменную data_IK. И не забыть сбросить флаг, для приема следующей команды. Также можно использовать флаг flagIK.AUPOV=1, для контроля удержания клавиши ил функции автопостора, например
if(flagIK.PRIEM)
{
flagIK.PRIEM=0;
OledCursor (0, 50);
bin_HEX(data_IK);
}
в этом примере выводим на дисплей код полученной команды.
Информация по ИК – кодам некоторых производителей
CCP модуль для декодирования ИК-кодов пультов ДУ - сводная таблица по кодам. 1.95 MB 82 downloads
CCP модуль для декодирования ИК-кодов пультов...Это может быть интересно
 MPLAB® Harmony – или как это просто! Часть 3.Views: 2237 Часть третья – копнём немного глубже. Вы наверное заметили, что во второй главе, вроде сначала все шло как по маслу, а потом, что бы заморгали светики, я вставил …
MPLAB® Harmony – или как это просто! Часть 3.Views: 2237 Часть третья – копнём немного глубже. Вы наверное заметили, что во второй главе, вроде сначала все шло как по маслу, а потом, что бы заморгали светики, я вставил … Гаджеты для домашней автоматики – Емкостной сенсорViews: 1821 Управление светодиодным освещением – Сенсор емкостной. Данный гаджет предназначен для управления освещением где необходимо включением освещение сенсорным прикосновением. Датчик позволяет управлять светодиодной нагрузкой в виде модулей или светодиодных лент …
Гаджеты для домашней автоматики – Емкостной сенсорViews: 1821 Управление светодиодным освещением – Сенсор емкостной. Данный гаджет предназначен для управления освещением где необходимо включением освещение сенсорным прикосновением. Датчик позволяет управлять светодиодной нагрузкой в виде модулей или светодиодных лент … OLED RET012864E/REX012864JViews: 1598 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как …
OLED RET012864E/REX012864JViews: 1598 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как … Гаджеты для домашней автоматики – Датчик приближенияViews: 2175 Управление светодиодным освещением – Датчик приближения. Данный гаджет предназначен для управления внутренним освещением мебели. Датчик позволяет определить закрытие или открытие дверцы или ящика и при этом включать или …
Гаджеты для домашней автоматики – Датчик приближенияViews: 2175 Управление светодиодным освещением – Датчик приближения. Данный гаджет предназначен для управления внутренним освещением мебели. Датчик позволяет определить закрытие или открытие дверцы или ящика и при этом включать или … Altium Designer – подготовка документации для производства и сборки печатных платViews: 3998 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем …
Altium Designer – подготовка документации для производства и сборки печатных платViews: 3998 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем … Гаджеты для домашней автоматики – Датчик движенияViews: 1506 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет …
Гаджеты для домашней автоматики – Датчик движенияViews: 1506 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет … Проект с использованием MCC часть 01Views: 2700 Для изучения MCC я выбрал простой контроллер PIC16F1509. Выбор его был обусловлен богатой новой периферией которую можно изучить. Для начала была собрана схема на макетной плате Внешний вид …
Проект с использованием MCC часть 01Views: 2700 Для изучения MCC я выбрал простой контроллер PIC16F1509. Выбор его был обусловлен богатой новой периферией которую можно изучить. Для начала была собрана схема на макетной плате Внешний вид … The art of DJViews: 251 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is …
The art of DJViews: 251 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is …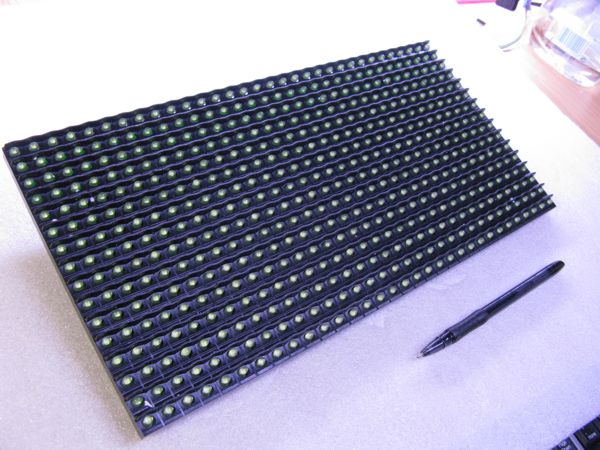 LED модуль P10 (1R) V706AViews: 7970 Это еще одно чудо от китайского брата. Это монохромные матрицы, называются они P10 (1R) V706A, ну типа R-красные, но не верьте паяют светики и зеленые и синие, в общем …
LED модуль P10 (1R) V706AViews: 7970 Это еще одно чудо от китайского брата. Это монохромные матрицы, называются они P10 (1R) V706A, ну типа R-красные, но не верьте паяют светики и зеленые и синие, в общем …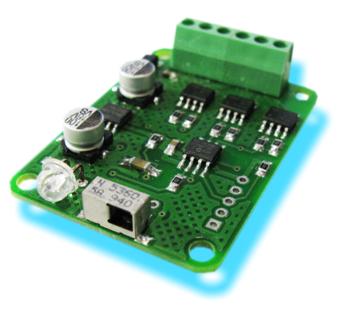 Контроллер управления светодиодным освещением с дистанционным управлениемViews: 2071 Все активнее светодиоды входят в нашу жизнь. Всё эффективнее становится светодиодное освещение. Всё ниже опускаются цены. Всё больше появляется возможностей получения сочных цветов, простоты в управлении. Всё чаще …
Контроллер управления светодиодным освещением с дистанционным управлениемViews: 2071 Все активнее светодиоды входят в нашу жизнь. Всё эффективнее становится светодиодное освещение. Всё ниже опускаются цены. Всё больше появляется возможностей получения сочных цветов, простоты в управлении. Всё чаще …