Views: 1022
И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, которыи позволяет изменять значения ШИМ, это PWM1_LoadDutyValue и PWM2_LoadDutyValue.
Надо только понимать, что их параметр это не процент, а число, в нашем случае число 10 битное, т.е. от 0 до 1023. Выполним некоторый предварительный эксперимент, добавим основной в текст нашей программы (наконец то, че нибудь своими руками напишим) две эти функции и обновим прошивку контроллера.
void main(void)
{
// initialize the device
SYSTEM_Initialize();
CLRWDT(); //сброс сторожевого таймера +++++++++++++++++++++-
// When using interrupts, you need to set the Global and Peripheral Interrupt Enable bits
// Use the following macros to:
// Enable the Global Interrupts
INTERRUPT_GlobalInterruptEnable();
// Enable the Peripheral Interrupts
//INTERRUPT_PeripheralInterruptEnable();
// Disable the Global Interrupts
//INTERRUPT_GlobalInterruptDisable();
// Disable the Peripheral Interrupts
//INTERRUPT_PeripheralInterruptDisable();
// LD1=0; // погасить
// LD2=1; // 0-погасить/1-засветить
PWM2_LoadDutyValue(2);
PWM1_LoadDutyValue(1023);
while (1)
{
CLRWDT(); //сброс сторожевого таймера +++++++++++++++++++++-
// Add your application code
// __delay_ms (500);
// LD2=!LD2;
// LD1=!LD1;
}
}
Перед основным циклом, закомментируем начальные настройки светиков и установим яркость LD1 100% = 1023, а яркость LD2 – 0,19% – этот значение 2. Перепрошьем микроконтроллер. И сразу заметим, что у нас изменились яркости горения светиков.
На фото видно, что первый светик горит на сто 100%, а второй еле “тлеет” ;). Нам теперь остается мелочь придумать корректное управление яркостью.
Сделаем так, при нажатии на кнопку будет изменяться переменная яркости которая будет вызывать функцию PWMх_LoadDutyValue для изменения яркости.
Конечно тыкать 1023 раза будет не интересно, можно сделать, чтобы яркость изменялась значению равном 1%, но сто раз это тоже многовато, сделаем например 10%, это 100/10= 10 шагов. Каждый шаг 1023/10 = 102. Значит так нажимаем на кнопку к значению текущей яркости прибавляется значение 51, нажимает вторую кнопку и от текущего значения вычитается 102.
Какие могут быть подводные камни, нам надо обеспечить, чтобы значение яркости не было больше 1023 и не было меньше 0.
Немного об особенностях настройки ШИМ ПИК-контроллеров
Период или частота задаются таймером Т2. Ширина импульса задается В регистрах PWMхDCL и PWMхDCH, величина ШИМ может быть меньше 10 бит и это будет зависеть от периода ШИМ, более подробно можно прочесть в описании на микроконтроллер. Для нас главное надо понять как формируется длительность.
Для того, чтобы получить сигнал при максимальном значении без импульсов, надо выбирать значение регистра PR2 < 255, если установить значение 255, то при 100% яркости мы получим наличие отрицательных импульсов ШИМ, что иногда совсем не приемлемо.

Для устранения этого нежелательного эффекта измените значение записываемое в регистр PR2, например, на 254.
Теперь при 100% яркости у нас отсутствую нежелательные импульсы. Что необходимо понять, если формируемая длительность (значение) больше значения записанного в регистр периода PR2, то на выходе ШИМ, будет логическая единица (или ноль – это зависит от выбранной полярности на выходе), Если равно или меньше, будет формироваться ШИМю При нуле, будет постоянно низкий уровень.
Для переменной яркости нам надо выбрать типа int со знаком, или в нашем проекте конкретно будет использовать такое описание int_least16_t, это число может принимать значение в диапазоне -32768 до + 32767 (описание можно посмотреть в файле stdint.h).
Первое, что надо будет сделать, мы должны использовать функции PWM в файлах pin_manager, а для этого необходимо их включить в эти файлы, в этом файле объявим и наши переменные яркости
Добавим в файл pin_manager.c описание переменных
.... #include "pwm1.h" // для работы с ШИМ #include "pwm2.h" // для работы с ШИМ int_least16_t BrightnessLED1,BrightnessLED2; // переменные значения яркости .....
Изменим функцию обработки нажатия кнопок.
void IOCBF6_ISR(void) {
// Add custom IOCBF6 code
__delay_ms(10);
// if(!RB6)LD1=!LD1;
if(!RB6)
{
BrightnessLED1+=102;
if(BrightnessLED1>1023)BrightnessLED1=1023;
PWM1_LoadDutyValue(BrightnessLED1);
}
// Call the interrupt handler for the callback registered at runtime
if(IOCBF6_InterruptHandler)
{
IOCBF6_InterruptHandler();
}
IOCBFbits.IOCBF6 = 0;
}
/**
IOCBF7 Interrupt Service Routine
*/
void IOCBF7_ISR(void) {
// Add custom IOCBF7 code
__delay_ms(10);
// if(!RB7)LD2=!LD2;
if(!RB7)
{
BrightnessLED1-=102;
if(BrightnessLED1<0)BrightnessLED1=0;
PWM1_LoadDutyValue(BrightnessLED1);
}
// Call the interrupt handler for the callback registered at runtime
if(IOCBF7_InterruptHandler)
{
IOCBF7_InterruptHandler();
}
IOCBFbits.IOCBF7 = 0;
}
Скомпилируем проект.
Теперь при помощи кнопок можно управлять яркостью светодиода 1. Для того, чтобы при подаче питания светодиоды не светились изменим начальное значение в MCC для PWM = 0%.
Проект для изучения
Проект с использованием MCC часть 08 739.74 KB 75 downloads
И так создадим проект в котором при помощи двух...Но тыкать пальцем в кнопочки меняя яркость одного светодиода как то не серьезно на современном этапе, стоит сделать управление яркостью одной кнопкой, а также чтобы работали два светика, что и как в следующей статье …
Это может быть интересно
 ch-светомузыка и AK4113Views: 1280 Пришло время вернуться к светомузыке. На сегодня использование аналогового входа стало непрактичным, на сегодня необходимо использовать S/PDIF и Toslink. С этим надо было как то разобрать, что это …
ch-светомузыка и AK4113Views: 1280 Пришло время вернуться к светомузыке. На сегодня использование аналогового входа стало непрактичным, на сегодня необходимо использовать S/PDIF и Toslink. С этим надо было как то разобрать, что это … Цифровой спидометр для автомобиляViews: 10151 Универсальность печатной платы ch-c0030pcb позволяет создавать на её основе разнообразные устройства. Одним из таких устройств является электронный спидометр для автомобиля, в котором можно задать два компаратора скорости, например, для …
Цифровой спидометр для автомобиляViews: 10151 Универсальность печатной платы ch-c0030pcb позволяет создавать на её основе разнообразные устройства. Одним из таких устройств является электронный спидометр для автомобиля, в котором можно задать два компаратора скорости, например, для … MPLAB® Harmony – или как это просто! Часть 4.Views: 2011 Часть четвертая – это может показаться немного сложно. Структура проекта. Для облегчения конфигурирования проекты MPLAB Harmony обычно структурированы таким образом, чтобы изолировать код, необходимый для настройки «системы», от …
MPLAB® Harmony – или как это просто! Часть 4.Views: 2011 Часть четвертая – это может показаться немного сложно. Структура проекта. Для облегчения конфигурирования проекты MPLAB Harmony обычно структурированы таким образом, чтобы изолировать код, необходимый для настройки «системы», от …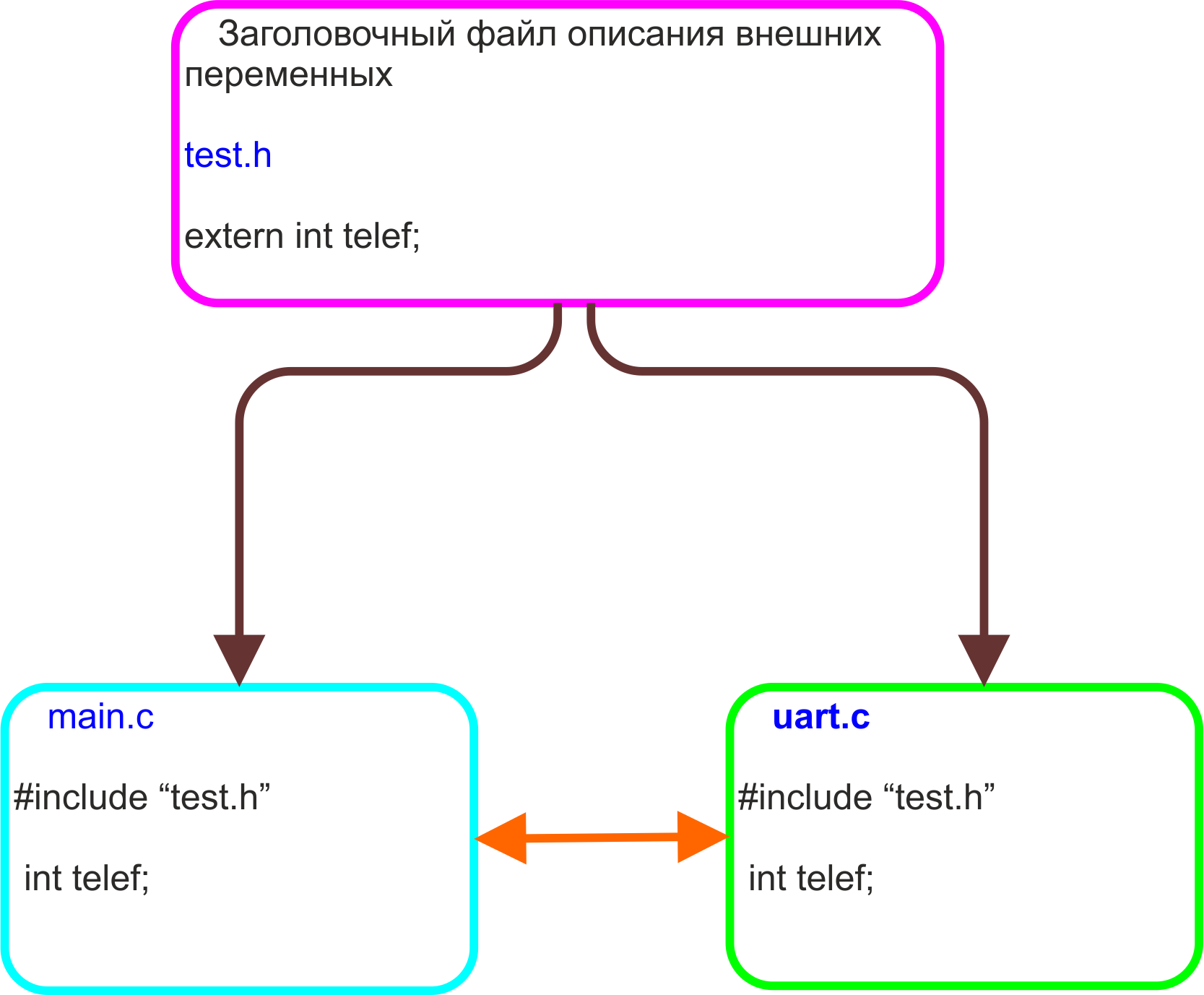 Просто о внешних переменныхViews: 785 Часто возникает задача когда необходимо предавать данные между модулями программы. Например, передать данные между файлами, или управлять работой модулей. Для этого создаем заголовочный файл и описываем наши переменные как …
Просто о внешних переменныхViews: 785 Часто возникает задача когда необходимо предавать данные между модулями программы. Например, передать данные между файлами, или управлять работой модулей. Для этого создаем заголовочный файл и описываем наши переменные как … Altium Designer first projectViews: 260 Эта статья подразумевает, что у вас установлен и настроен Altium Designer как описано в статье Altium Designer my setup system and project structure. Обратите внимание! Библиотека постоянно обновляется, …
Altium Designer first projectViews: 260 Эта статья подразумевает, что у вас установлен и настроен Altium Designer как описано в статье Altium Designer my setup system and project structure. Обратите внимание! Библиотека постоянно обновляется, … Acquaintance with audio-bluetooth modules F-6888 (BK3254).Views: 2156 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, …
Acquaintance with audio-bluetooth modules F-6888 (BK3254).Views: 2156 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, … Altium Designer – подготовка документации для производства и сборки печатных платViews: 3643 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем …
Altium Designer – подготовка документации для производства и сборки печатных платViews: 3643 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем … Altium Designer my setup system and project structure V23.3Views: 163 Оновлення бази даних та шаблонів від березня 2023 року. Updating the database and templates from March 2023. Altium Designer my Libraries, Project templates, System settings by Catcatcat. Дивись …
Altium Designer my setup system and project structure V23.3Views: 163 Оновлення бази даних та шаблонів від березня 2023 року. Updating the database and templates from March 2023. Altium Designer my Libraries, Project templates, System settings by Catcatcat. Дивись … NS108-5050-16bit от NewstarViews: 592 Кто уже использует в своих проектах адресуемые светодиоды хорошо знакомы с такими как WS2812 и им подобные. Эти светодиоды для управления используют однопроводную шину. Из-за этого пропускная способность …
NS108-5050-16bit от NewstarViews: 592 Кто уже использует в своих проектах адресуемые светодиоды хорошо знакомы с такими как WS2812 и им подобные. Эти светодиоды для управления используют однопроводную шину. Из-за этого пропускная способность … Гаджеты для домашней автоматики – Датчик движенияViews: 1444 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет …
Гаджеты для домашней автоматики – Датчик движенияViews: 1444 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет …
Комментарии