Views: 882
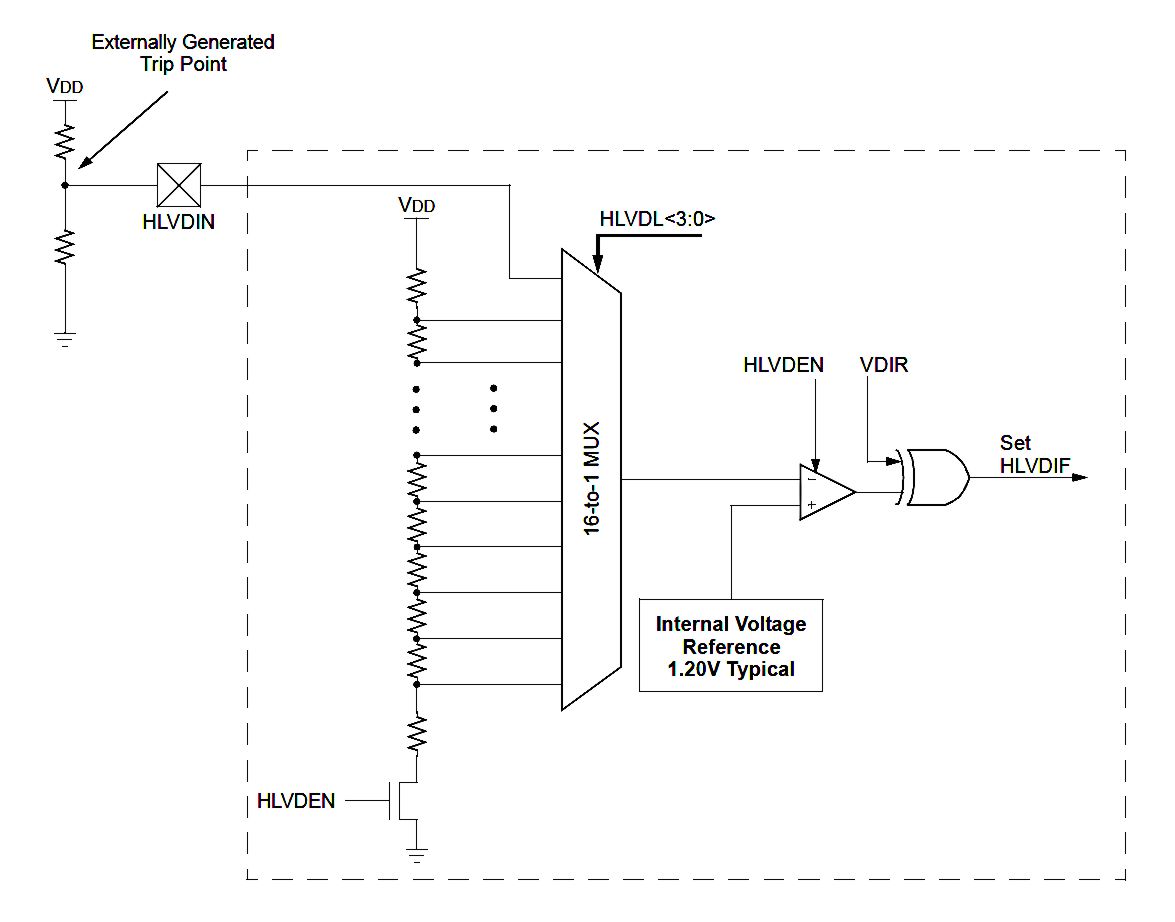
HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что необходимо выполнить соответствующие действия. Часто этот модуль необходим, чтобы выполнить обработку аварийных ситуаций при пропадании напряжения питания.
В микроконтроллере PIC24FJ128GA204 есть возможность получения аналогового сигнала с внешнего делителя, но есть микроконтроллеры, в котором этот вход отсутствует, и возможен контроль только самого напряжения питания микроконтроллера. Внешний вход позволяет значительно расширить контроль напряжения питания, можно вывести контроль на входное напряжение до стабилизатора и на раннем этапе обнаружить понижение напряжения и раньше начать выполнять процедуру остановки системы.
Модуль имеет один регистр управления HLVDCON. Назначение бит следующее:
| HLVDCON: HIGH/LOW-VOLTAGE DETECT CONTROL REGISTER | |||||||
| R/W-0 | U-0 | R/W-0 | U-0 | U-0 | U-0 | U-0 | U-0 |
| HLVDEN | LSIDL | ||||||
| bit 15 | bit 14 | bit 13 | bit 12 | bit 11 | bit 10 | bit 9 | bit 8 |
| R/W-0 | R/W-0 | R/W-0 | U-0 | R/W-0 | R/W-0 | R/W-0 | R/W-0 |
| VDIR | BGVST | IRVST | HLVDL3 | HLVDL2 | HLVDL1 | HLVDL0 | |
| bit 7 | bit 6 | bit 5 | bit 4 | bit 3 | bit 2 | bit 1 | bit 0 |
bit 15 HLVDEN: бит включения питания модуля
1 = HLVD включен
0 = HLVD отключен
bit 14 Не реализовано: чтение дает ‘0’
bit 13 LIDL: бит работы модуля в режиме ожидания
1 = модуль отключен, когда устройство переходит в режим ожидания
0 = модуль продолжит работу в режиме ожидания
bit 12-8 Не реализовано: чтение дает ‘0’
bit 7 VDIR: Выбор направления изменения напряжения для формирования события
1 = Событие возникает, когда напряжение равно или превышает точку отключения (HLVDL <3: 0>)
0 = Событие возникает, когда напряжение равно или падает ниже точки отключения (HLVDL <3: 0>)
bit 6 BGVST: бит флага стабильности напряжения запрещенной зоны
1 = Указывает, что напряжение запрещенной зоны является стабильным
0 = Указывает, что напряжение запрещенной зоны является неустойчивым
bit 5 IRVST: бит флага стабильности внутренего источника опорного напряжения
1 = Внутреннее опорное напряжение является стабильным; логика High-Voltage Detect генерирует флаг прерывания на
заданный диапазон напряжения
0 = Внутреннее опорное напряжение неустойчиво; логика обнаружения высокого напряжения не приведет к прерыванию флаг в указанном диапазоне напряжений и прерывание HLVD не должно быть включено
bit 4 Не реализовано: чтение дает ‘0’
bit 3-0 HLVDL <3: 0>: бит ограничения обнаружения высокого / низкого напряжения
1111 = используется внешний аналоговый вход (вход поступает от выводов HLVDIN)
1110 = Точка отключения 1 (1)
1101 = точка отключения 2 (1)
*
*
*
1100 = точка срабатывания 3 (1)
0100 = Точка отключения 11 (1)
00xx = состояние не используется
| HIGH/LOW-VOLTAGE DETECT CHARACTERISTICS | ||||||
| Symbol | Characteristic | Min | Typ | Max | Units | |
| VHLVD | HLVD Voltage on VDD Transition |
HLVDL<3:0> = 0100 | 3.45 | 3.59 | 3.74 | V |
| HLVDL<3:0> = 0101 | 3.33 | 3.45 | 3.58 | V | ||
| HLVDL<3:0> = 0110 | 3.0 | 3.125 | 3.25 | V | ||
| HLVDL<3:0> = 0111 | 2.8 | 2.92 | 3.04 | V | ||
| HLVDL<3:0> = 1000 | 2.7 | 2.81 | 2.93 | V | ||
| HLVDL<3:0> = 1001 | 2.50 | 2.6 | 2.70 | V | ||
| HLVDL<3:0> = 1010 | 2.40 | 2.52 | 2.64 | V | ||
| HLVDL<3:0> = 1011 | 2.30 | 2.40 | 2.50 | V | ||
| HLVDL<3:0> = 1100 | 2.20 | 2.29 | 2.39 | V | ||
| HLVDL<3:0> = 1101 | 2.10 | 2.19 | 2.28 | V | ||
| HLVDL<3:0> = 1110 | 2.00 | 2.08 | 2.17 | V | ||
| VTHL | HLVD Voltage on HLVDIN Pin Transition |
HLVDL<3:0> = 1111 | – | 1.2 | – | V |
Настройка модуля для работы с внешним напряжение, для контроля понижение ниже порога в MCC, выглядит таким образом:
Добавим модуль в ресурсы проекта
Выполним настройку:

Включим модуль (Enable HLVD), активируем прерывания от модуля, в последствии в прерывания включим процедуру, в которой будет необходимо выполнить требуемые операции при пропадании напряжения питания. Выберем внешний вход HLVD для контроля напряжения.
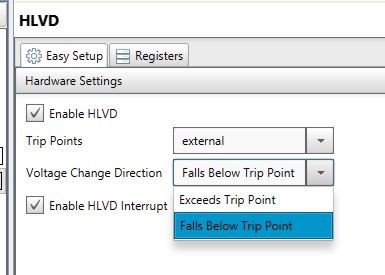
Настроим логику работы прерывания (Voltage Change Direction) Выбор направления изменения напряжения для формирования события:
Exceeds Trip Point – Событие возникает, когда напряжение равно или превышает точку отключения.
Falls Below Trip Point – Событие возникает, когда напряжение равно или падает ниже точки отключения.
Нас интересует вариант когда напряжение упадет ниже значения на входе 1,2 вольта (та как мы используем контроль по внешнему входу). Для контроля более высокого порога нам необходимо применить делитель на резисторах.
Например, нам надо контролировать порог 25 вольт. В качестве резистора “на землю” выберем 10 кОм, рассчитаем “верхний” резистор. Вспоминаем закон Ома.
На резисторе 10 кОм мы должны получить напряжение 1,2 вольта когда входное 25 вольт. Находим ток в цепи:
I= U/R = 1.2 V /10000 Ohm = 0.00012 A.
Падение напряжение на вернем резисторе:
Vv = Vin – 1.2 V = 25 – 1.2 = 23.8 V.
Зная ток в цепи и напряжение на резисторе найдем его сопротивление:
R = U/I = 23.8 V / 0.00012 A = 198333 Ohm.
Это приблизительно 200 kOhm.
Выполним обратный расчет, при напряжении 25 вольт на выходе делителя мы будем иметь 1.1904761904762 вольта. Но учитывая возможную погрешность на применяемом делителе, это все, вполне приемлемо.
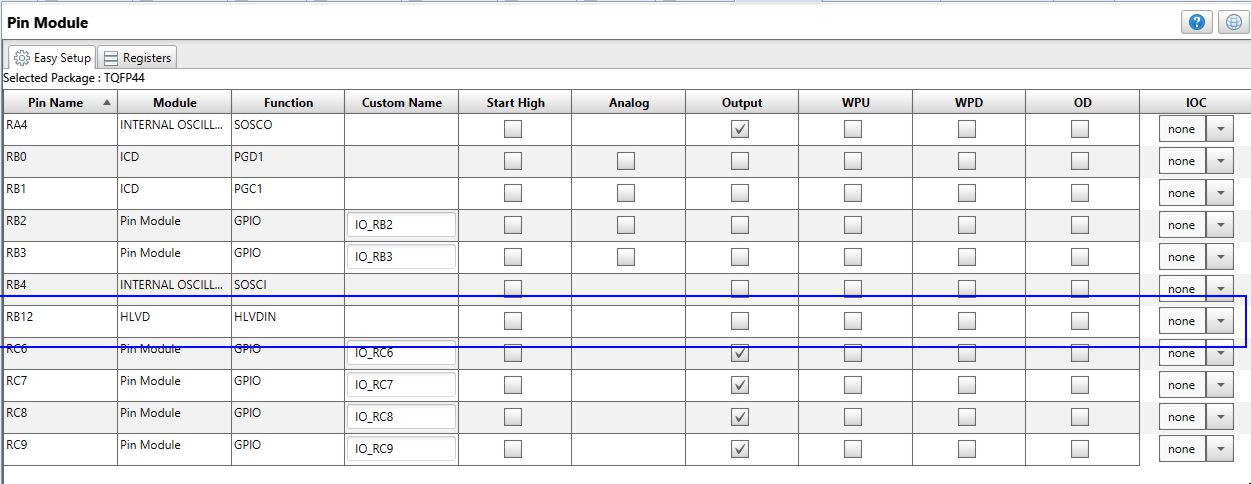
Проверим настройку входа для HLVD модуля:

Выберем Pin Module
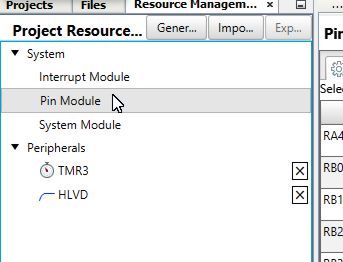
и проверим настройку входа
Запустим генерацию файлов в MCC

По окончанию генерации MCC предоставит нам несколько функций:
void HLVD_Initialize (void) – инициализация и настройка модуля под наши параметры, это функция будут включена в процедуру запуска микроконтроллера. Это мы можем убедиться просмотрев функцию void SYSTEM_Initialize (void) в файле systems.c
void SYSTEM_Initialize(void)
{
PIN_MANAGER_Initialize();
CLOCK_Initialize();
INTERRUPT_Initialize();
HLVD_Initialize();
TMR3_Initialize();
}
bool HLVD_IsReferenceVoltageStable(void) – возвращает состояние стабильно или не стабильно опорное напряжение.
bool HLVD_IsBandGapVoltageStable(void) – возвращает состояние стабильно ли контролируемое напряжение.
void HLVD_Enable(void) – предоставляет возможность пользователю включать модуль в процессе работы программы.
void HLVD_Disable(void) – отключать модуль.
void HLVD_TripPointSetup(HLVD_TRIP_DIRECTION direction, HLVD_TRIP_POINTS trip_points) – изменять настройки контроля напряжения.
и сама функция выполнения прерывания от события:
void __attribute__ (( interrupt, no_auto_psv )) _ISR _LVDInterrupt( void )
{
if(IFS4bits.HLVDIF)
{
/* TODO : Add interrupt handling code */
IFS4bits.HLVDIF = 0;
}
}
В нее надо встроить нашу функцию, которая будет обязана выполнить наши задания, если напряжение питания становиться ниже нормы.
Это может быть интересно
 Altium Designer first projectViews: 549 Эта статья подразумевает, что у вас установлен и настроен Altium Designer как описано в статье Altium Designer my setup system and project structure. Обратите внимание! Библиотека постоянно обновляется, …
Altium Designer first projectViews: 549 Эта статья подразумевает, что у вас установлен и настроен Altium Designer как описано в статье Altium Designer my setup system and project structure. Обратите внимание! Библиотека постоянно обновляется, … PIC32MZ – Core Timer (библиотека)Views: 589 Переработанные файлы от Microchip, библиотека для работы с Core Timer.
PIC32MZ – Core Timer (библиотека)Views: 589 Переработанные файлы от Microchip, библиотека для работы с Core Timer. Просто о структурах и объединениях в СиViews: 2392 Какие задачи нам позволяют решать структуры и объединения? Для разработчика встроенных систем эффективность и компактность кода всегда на первом месте. Если программировании на Ассемблере ты сам определяешь как …
Просто о структурах и объединениях в СиViews: 2392 Какие задачи нам позволяют решать структуры и объединения? Для разработчика встроенных систем эффективность и компактность кода всегда на первом месте. Если программировании на Ассемблере ты сам определяешь как … Pogo Pin Connector LibViews: 39 У своїх проектах почав застосовувати з’єднувачі та контакти типу Pogo Pin. Для цього до своєї існуючої БД додав нову бібліотеку. Огляд від ІІ Pogo Pin (погопін) – це …
Pogo Pin Connector LibViews: 39 У своїх проектах почав застосовувати з’єднувачі та контакти типу Pogo Pin. Для цього до своєї існуючої БД додав нову бібліотеку. Огляд від ІІ Pogo Pin (погопін) – це … Проект с использованием MCC часть 02Views: 2466 Когда мы запустили конфигуратор, самое главное понять, что с этим делать и как проверить, то что мы делаем работает или нет. Для начала настроим регистры конфигурации микроконтроллера и настроем …
Проект с использованием MCC часть 02Views: 2466 Когда мы запустили конфигуратор, самое главное понять, что с этим делать и как проверить, то что мы делаем работает или нет. Для начала настроим регистры конфигурации микроконтроллера и настроем … Development Boards PIC18F47Q84Views: 8478 Microchip тішить новими мікроконтролерами. Особливістю цього MCU – це багата інтелектуальна периферія, що дозволяє вирішувати такі завдання на 8 бітних MCU, які неможливо реалізувати на деяких навіть 32 …
Development Boards PIC18F47Q84Views: 8478 Microchip тішить новими мікроконтролерами. Особливістю цього MCU – це багата інтелектуальна периферія, що дозволяє вирішувати такі завдання на 8 бітних MCU, які неможливо реалізувати на деяких навіть 32 … Flight controller for FPV drone.Views: 62 Reverse engineering of a flight controller (SpeedyBee F405 V4 55A 30×30 Stack). Мене зацікавила конструкція основних компонентів FPV-дрона. Першим варіантом, який я розглянув, був контролер польоту від китайської …
Flight controller for FPV drone.Views: 62 Reverse engineering of a flight controller (SpeedyBee F405 V4 55A 30×30 Stack). Мене зацікавила конструкція основних компонентів FPV-дрона. Першим варіантом, який я розглянув, був контролер польоту від китайської … Проект с использованием MCC часть 12-1Views: 1140 В настоящее время без визуализации информации уже не интересно. Поэтому научимся выводить информацию на дисплей. Для это возьмет простенький OLED RET012864E/REX012864J я такой приобретал в фирме “Гамма-Украина”, описание можно …
Проект с использованием MCC часть 12-1Views: 1140 В настоящее время без визуализации информации уже не интересно. Поэтому научимся выводить информацию на дисплей. Для это возьмет простенький OLED RET012864E/REX012864J я такой приобретал в фирме “Гамма-Украина”, описание можно … Проект с использованием MCC часть 13Views: 1267 Так как используя MCC мы можем его использовать со своими библиотеками, поэтому настало время и свое создать. Для начала откроем наш заголовочный файл в нем очень много букв: По …
Проект с использованием MCC часть 13Views: 1267 Так как используя MCC мы можем его использовать со своими библиотеками, поэтому настало время и свое создать. Для начала откроем наш заголовочный файл в нем очень много букв: По … Проект с использованием MCC часть 08Views: 1328 И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, …
Проект с использованием MCC часть 08Views: 1328 И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, …