
Views: 828
HL1606 представляет собой светодиодный драйвер с управлением по SPI шине. Его особенность получения динамических эффектом с помощью передачи минимального количества данных по шине данных.

Смысл управления заключается в том, что он для управления светодиодом имеет всего 4 команды:
- включить
- выключить
- увеличение яркости
- уменьшение яркости
И два бита управления
- бит управления – обычная скорость или двойная диммирования
- бит управления – защелка, воспринимаются полученные данный драйвером или игнорируются.
А также бит управления который задает режим для динамической индикации. А именно продолжать изменение яркости когда достигнуто значение яркости 0 или максимум. Скорость изменение яркости задается тактовой частотой управляемой по входу S-I.
Всего драйвер позволяет формировать 128 уровней яркости, чего вполне хватает для простых устройств.
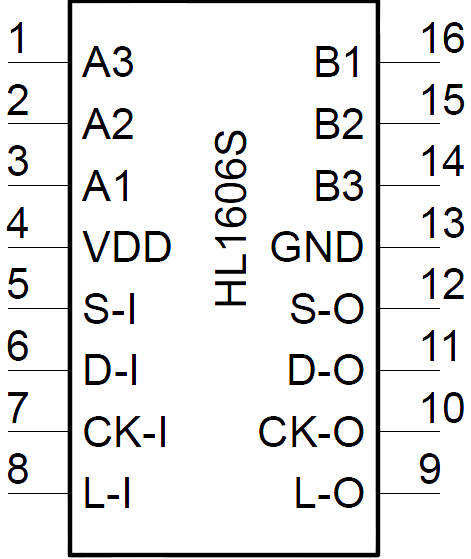
Назначение выводов драйвера (Е -сборка).
| № | Обозначение | Назначение | № | Обозначение | Назначение |
| 1 | S-I | Тактовая для диммирования | 16 | Vdd | VDD + 5V |
| 2 | D-I | Вход данных | 15 | A1 | выход драйвер светодиода |
| 3 | CK-I | Синхроимпульсы данных | 14 | A2 | выход драйвер светодиода |
| 4 | L-I | Защелка передачи данных | 13 | A3 | выход драйвер светодиода |
| 5 | L-O | Выход данных | 12 | B1 | выход драйвер светодиода |
| 6 | CK-O | Выход синхроимпульсы данных | 11 | B2 | выход драйвер светодиода |
| 7 | D-O | Выход данных | 10 | B3 | выход драйвер светодиода |
| 8 | S-O | Выход тактовой для диммирования | 9 | GND | GND общий |
Формат передаваемых данных.
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| Управление каналом A1-A2-A3 | Управление каналом B1-B2-B3 | ||||||||||||||
Описание команд управления.
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 |
| A1(B1) бит управления | A2(B2) бит управления | A1(B1) бит управления | Управление скоростью диммирования | Бит управления защелка | |||
| 00 – погасить светодиод | 0-обычная скорость | 0 – игнорирование данных | |||||
| 01 – включить светодиод | |||||||
| 10 – нарастание яркости* | 1 – удвоенная скорость | 1-данные должны быть загружены | |||||
| 11 – уменьшение яркости* | |||||||
Нарастание яркости – при загрузке данных, яркость устанавливается в 0, и увеличивается до максимума,
Уменьшение яркости – при загрузке данных, яркость устанавливается в максимум и уменьшается до нуля.
При обычной скорости диммирования присутствует 128 уровней яркости на канал, при удвоенной 64.
Управления RGB ленточками, с маркой MEGA lite.
/* номер байта --- 76 54 32 10 * назначение байт хх хх хх хх * | | | +-- синий * | | +----- красный * | +-------- зеленый * +----------- биты управления бит 7 - фиктивные/достоверные данные * бит 6 - нормальная/удвоенная скорость диммирования */
Функция загрузки данных через SPI, для 32_вух микросхем (64 RGB светодиода)
void VOU_HL1606S (void) // драйвер загрузки данных в ВОУ на 64 светик (ВОУ-GRB)
{
int dataout;// данные для передачи
int a;
SPLI=0; // 0-выбор
for(a=0;a<64;a++)
{
SPI2BUF=BOU[a];
while(!SPI2STATbits.SPIRBF);//
dataout=SPI2BUF; // сброс бита SPIRBF
}
SPLI=1; // запись
}
Пример работы светомузыки на драйвере HL1606
продолжение следует…..
Файлы для загрузки
Описание драйвера в формате PDF HL1616S [wpdm_file id=0]Описание драйвера в формате PDF HL1616E [wpdm_file id=238 template=”link-template-calltoaction3.php”]
Это может быть интересно
 I2C MODULE – PIC18F25K42 Device ID Revision = A001Views: 1207 I2C MODULE Обход ошибок в версии I2C MODULE – PIC18F25K42 Device ID Revision = A001 В Серии K42 применен совершенно новый модуль шины I2C, который позволяет поддерживать все …
I2C MODULE – PIC18F25K42 Device ID Revision = A001Views: 1207 I2C MODULE Обход ошибок в версии I2C MODULE – PIC18F25K42 Device ID Revision = A001 В Серии K42 применен совершенно новый модуль шины I2C, который позволяет поддерживать все … Pogo Pin Connector LibViews: 41 У своїх проектах почав застосовувати з’єднувачі та контакти типу Pogo Pin. Для цього до своєї існуючої БД додав нову бібліотеку. Огляд від ІІ Pogo Pin (погопін) – це …
Pogo Pin Connector LibViews: 41 У своїх проектах почав застосовувати з’єднувачі та контакти типу Pogo Pin. Для цього до своєї існуючої БД додав нову бібліотеку. Огляд від ІІ Pogo Pin (погопін) – це … Analog-to-Digital Converter with Computation Technical BriefViews: 1526 Аналого-цифровой преобразователь с вычислительным модулем. ВВЕДЕНИЕ Аналого-цифровой преобразователь (ADC) с вычислительным модулем (ADC2) в 8-разрядном микроконтроллере Microchip имеет встроенные вычислительные функции, которые обеспечивают функции пост-обработки, такие как передискретизация, …
Analog-to-Digital Converter with Computation Technical BriefViews: 1526 Аналого-цифровой преобразователь с вычислительным модулем. ВВЕДЕНИЕ Аналого-цифровой преобразователь (ADC) с вычислительным модулем (ADC2) в 8-разрядном микроконтроллере Microchip имеет встроенные вычислительные функции, которые обеспечивают функции пост-обработки, такие как передискретизация, … LCD драйвер – UC1601sViews: 1839 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG.
LCD драйвер – UC1601sViews: 1839 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG. VU Meter Tower ART – part 2Views: 1254 Проект – VU Meter Tower ART получил продолжение в своем развитии. Теперь можно заказать набор деталей из акрила для самостоятельной сборки. В проект корпуса внесено целый ряд доработок, …
VU Meter Tower ART – part 2Views: 1254 Проект – VU Meter Tower ART получил продолжение в своем развитии. Теперь можно заказать набор деталей из акрила для самостоятельной сборки. В проект корпуса внесено целый ряд доработок, … Простой оптический сенсор приближенияОптический сенсор, назначение оптический концевик, для автоматики, бесконтактный выключатель с функцией автоматического отключения...
Простой оптический сенсор приближенияОптический сенсор, назначение оптический концевик, для автоматики, бесконтактный выключатель с функцией автоматического отключения... Проект с использованием MCC часть 07Views: 1278 Модуль PWM – широтно импульсная модуляция (ШИМ). ПИК контроллеры часто на борту имеют модули ШИМ. На их основе строятся многие узлы управления электро приводами. В нашем варианте мы …
Проект с использованием MCC часть 07Views: 1278 Модуль PWM – широтно импульсная модуляция (ШИМ). ПИК контроллеры часто на борту имеют модули ШИМ. На их основе строятся многие узлы управления электро приводами. В нашем варианте мы … Проект с использованием MCC часть 10Views: 1136 Алгоритм управления освещением от нажатия кнопки. Обработка удержания кнопки: Мы должны проверить кнопка в настоящий момент нажата и флаг удержания установлен, если да Проверить таймер удержания “отработал” – …
Проект с использованием MCC часть 10Views: 1136 Алгоритм управления освещением от нажатия кнопки. Обработка удержания кнопки: Мы должны проверить кнопка в настоящий момент нажата и флаг удержания установлен, если да Проверить таймер удержания “отработал” – … Проект с использованием MCC часть 02Views: 2467 Когда мы запустили конфигуратор, самое главное понять, что с этим делать и как проверить, то что мы делаем работает или нет. Для начала настроим регистры конфигурации микроконтроллера и настроем …
Проект с использованием MCC часть 02Views: 2467 Когда мы запустили конфигуратор, самое главное понять, что с этим делать и как проверить, то что мы делаем работает или нет. Для начала настроим регистры конфигурации микроконтроллера и настроем …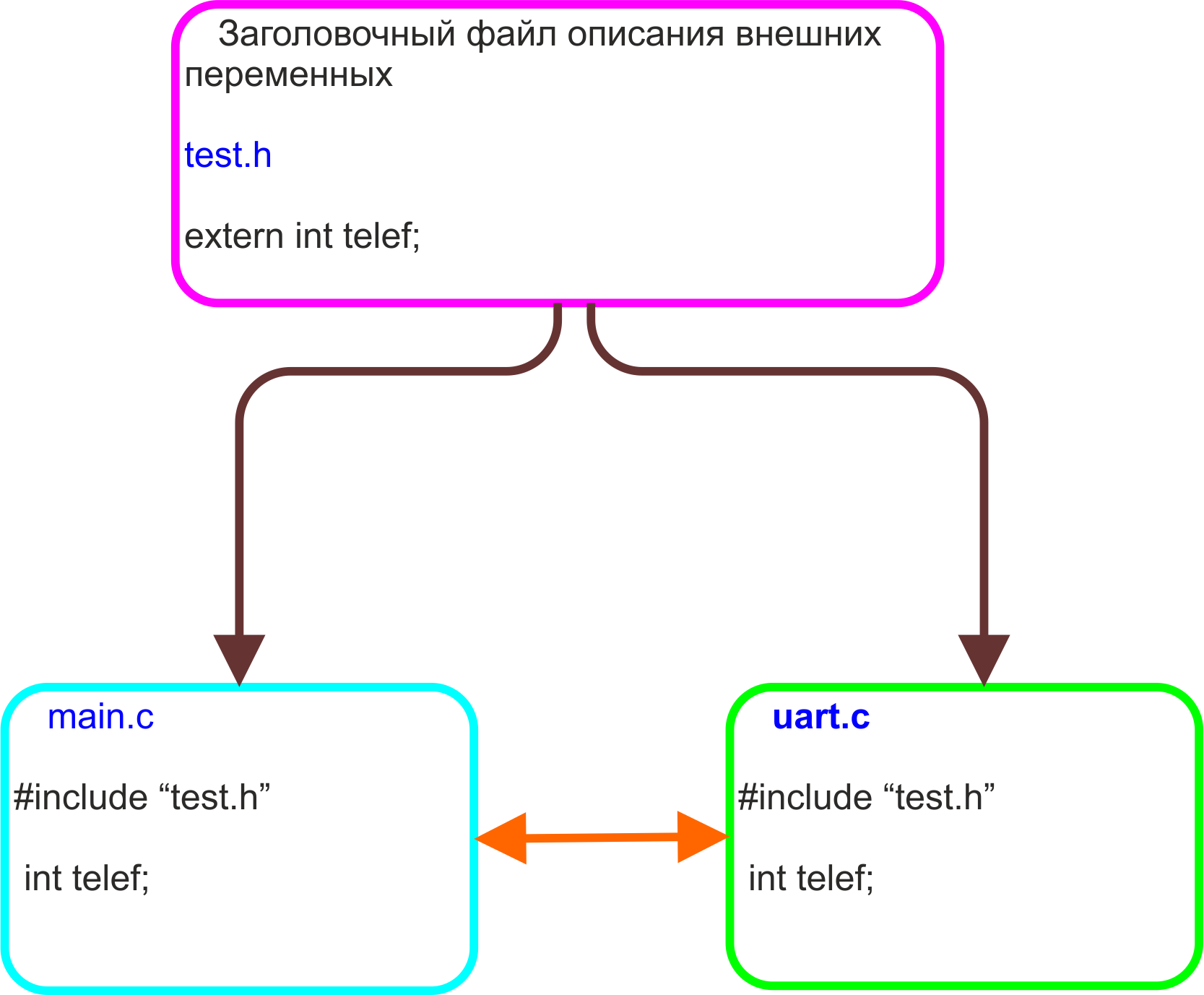 Просто о внешних переменныхViews: 951 Часто возникает задача когда необходимо предавать данные между модулями программы. Например, передать данные между файлами, или управлять работой модулей. Для этого создаем заголовочный файл и описываем наши переменные как …
Просто о внешних переменныхViews: 951 Часто возникает задача когда необходимо предавать данные между модулями программы. Например, передать данные между файлами, или управлять работой модулей. Для этого создаем заголовочный файл и описываем наши переменные как …