Views: 1205
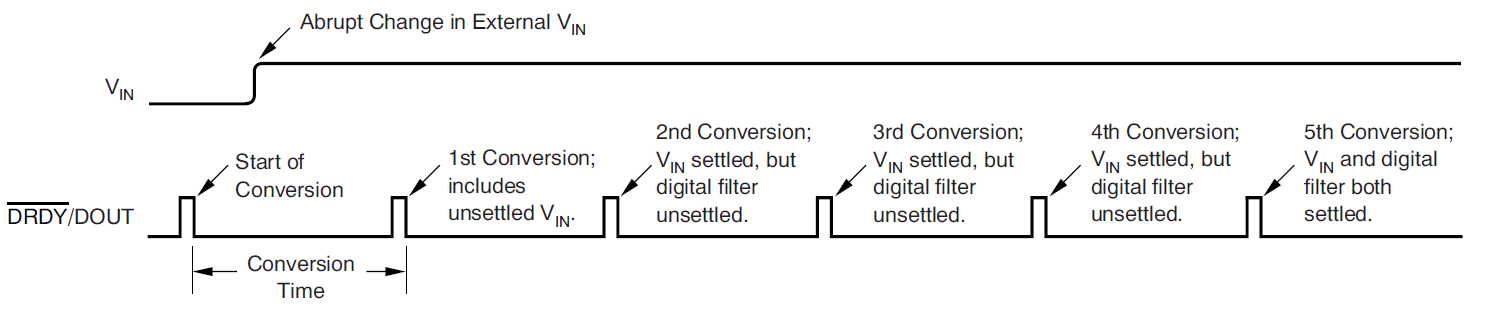
 АЦП ADS1230 – это 20 битный АЦП со скоростью измерения 10 или 80 раз в секунду. При подаче питания АЦП постоянно выполняет измерения. Данные можно получить с него по SPI шине. Максимальная тактовая частота шины до 1 мГц. Каждое измерение выполненное АЦП инициализируется самим АЦП по шине данных положительным импульсом. Чтение микроконтроллер должен начинать по получению отрицательного фронта.
АЦП ADS1230 – это 20 битный АЦП со скоростью измерения 10 или 80 раз в секунду. При подаче питания АЦП постоянно выполняет измерения. Данные можно получить с него по SPI шине. Максимальная тактовая частота шины до 1 мГц. Каждое измерение выполненное АЦП инициализируется самим АЦП по шине данных положительным импульсом. Чтение микроконтроллер должен начинать по получению отрицательного фронта.
Данные передаются старшим битом в перед для чтения 20 бит необходимо 3 байта. Данные выровнены влево.
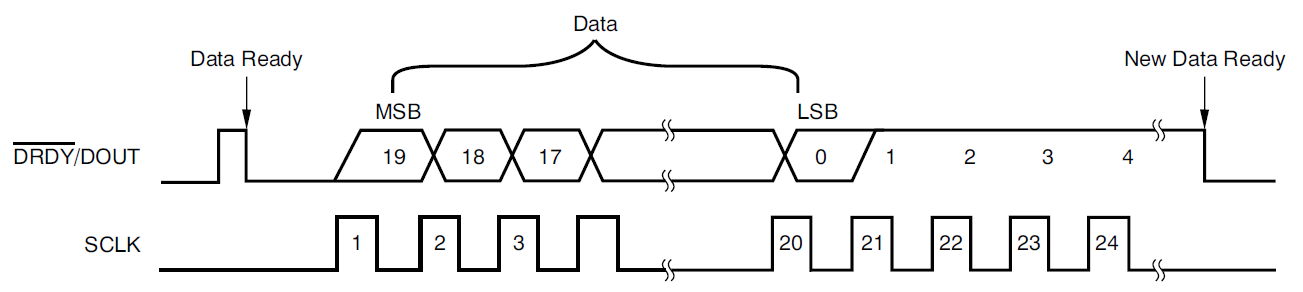
Для чтения данных необходимо настроить SPI по отрицательному фронту синхроимпульсов.
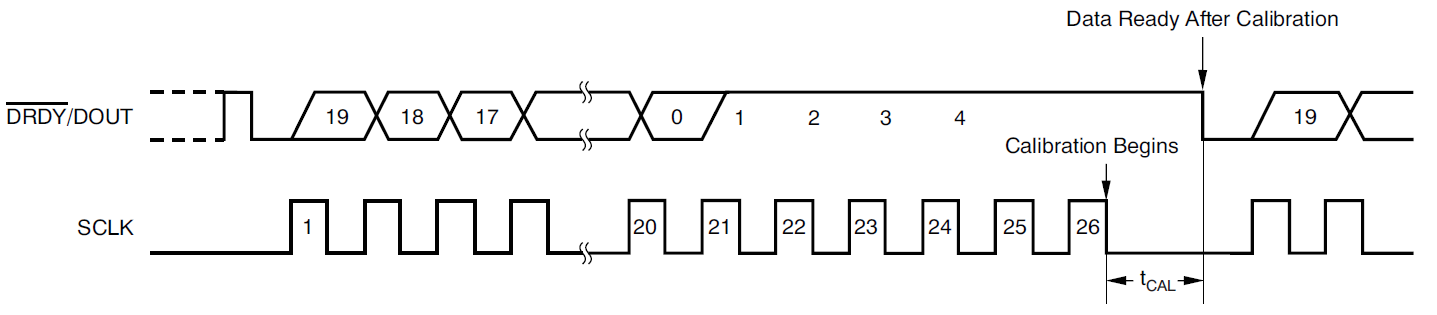
Управляя количеством синхроимпульсов можно управлять функциями АЦП, одна из них это калибровка АЦП.
Калибровки смещения
Калибровка смещения может быть начата в любое время для компенсации в ADS1230 погрешности смещения. Чтобы начать калибровку смещения, необходимо по крайней мере, два дополнительных SCLKs после получения 20 бит данных. Данные мы получаем чтением 24 бита. Если продолжить формирование SCLK, то задний фронт 26-го SCLK начинается цикл калибровки. Дополнительные импульсы SCLK могут быть отправлены после 26 SCLK, однако, активность на шине SCLK должны быть сведены к минимуму, во время калибровки смещения, для достижения наилучших результатов. В течение выполнения функции калибровки, аналоговые входные контакты отсоединены от входов АЦП и соответствующий сигнал подается внутри, чтобы выполнить калибровку. Когда калибровка завершена, DRDY/DOUT переходит в низкий уровень, что указывает, что новые данные готовы. Первое преобразование после калибровки содержит достоверные данные.
Стандартная схема подключения АЦП к мосту датчика для измерения веса.
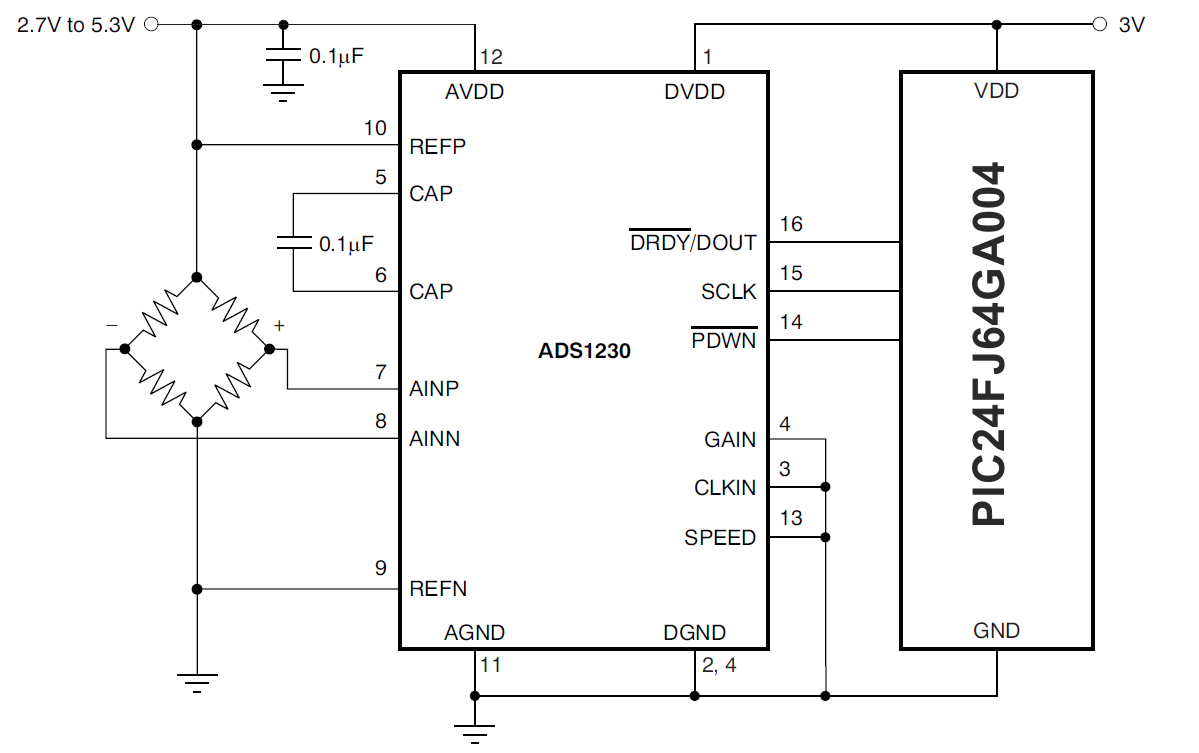
Вариант подключения АЦП к PIC24FJ64GA004.
Подключение будет выполнено к SPI2
void init_spi2 (void) // настройка SPI2
/* настраивается только на приём данных
* данные с АЦП
*/
{
/* SPI2 - настройка для работы с входным усилителем и индикатором
* PPRE
* 11 = Primary prescale 1:1
* 10 = Primary prescale 4:1
* 01 = Primary prescale 16:1
* 00 = Primary prescale 64:1
* SPRE
* 111 = Secondary prescale 1:1
* 110 = 2
* 101 = 3
* 100 = 4
* 011 = 5
* 010 = 6
* 001 = 7
* 000 = Secondary prescale 8:1*/
// RPOR4bits.RP9R=0b01001; // SPI2 Slave Select Output//CS
// RPOR6bits.RP12R=0b01010; // SPI2 Data Output
RPINR22bits.SDI2R = 20; // SPI2 Data Input - RP20/ нога 37
RPOR10bits.RP21R=11; // SPI2 Clock Output
SPI2STATbits.SPIEN = 0; // выключить
SPI2CON1 = 0b0000000000111001; //FCY/1/6=50/6=8,3
/* ||||||||||||||++--- PPRE<1:0>: настройка предделителя 1 11 = Primary prescale 4:1
* |||||||||||+++----- SPRE<2:0>: настройка предделителя 2 111 = Primary prescale 8:1
* ||||||||||+-------- MSTEN: 1 = Режим ведущего, 0 = режим ведомого
* |||||||||+--------- CKP:0 = пассивный уровень шины SCL 1- высокий, 0-низкий
* ||||||||+---------- SSEN:Slave Select Enable bit (Slave mode)
* |||||||+----------- CKE: смена бита данных происходит: 1-от активного в пассивное(синх-0/1)/0-пассивного в активное (синх-1/0)
* ||||||+------------ SMP:0 = Input data sampled at middle of data output time
* |||||+------------- MODE16: Communication is word-wide (8 bits)
* ||||+-------------- DISSDO: 0-в работе
* |||+--------------- DISSCK: 0-в работе
* +++---------------- не используются
*/
SPI2CON2 = 0b0000000000000000;
/* |||||||||||||||+--- не используется
* ||||||||||||||+---- FRMDLY:
* |||+++++++++++----- не используются
* ||+---------------- FRMPOL:
* |+----------------- SPIFSD:
* +------------------ FRMEN:
*/
SPI2STAT = 0b1000000000000000;
/* |||||||||||||||+--- SPIRBF: Флаг приемного буфера 1 - данные приняты 0- прием выполняется SPI2RXB пуст
* ||||||||||||||+---- SPITBF: Флаг передатчика 1 - передача не началась (буфер полон), 0 - передача началась буфер пуст (устанавливается сбрасывается аппаратно)
* ||||||||||++++----- не используются
* |||||||||+--------- SPIROV: 1 - произошло переполнение 0 - нет переполнения премного буфера.
* |||++++++---------- не используются
* ||+---------------- SPISIDL: режим работы в состоянии ожидания 0 - работает 1 - отключен модуль
* |+----------------- не используется
* +------------------ SPIEN: 1 - модуль включен 0 - выключен.
*/
SPI2STATbits.SPIEN = 1; // БИТ Включить - должен быть активирован последним, чтобы вступили в действии все изменения.
}
Сама обработка данных и синхронизация выполняется через прерывания по входу через которые на SPI2 поступают данные. Настройка прерывание:
void ADCIZ (void)// включить измерение
{
ADCVMOSST=1; // подать питание на датчик
ADCPDWN=1; // включить ADC
CNEN2bits.CN25IE=1; // разрешить прерывание по входу
_CNIF = 0; // сбросить прерывание
_CNIE = 1; // включить прерывание
}
Первые две строчки это если есть необходимость в управлении подачей питания на измерительный мост и управления режимом “слип” АЦП. Следующие три строки это настройка режима прерывания по входу через который АЦП получает данные.
Получение данных происходит через функцию прерывания:
void __attribute__((interrupt, auto_psv)) _CNInterrupt (void)
{
unsigned long datain;
_LATB2=!_LATB2; // индикация работы АЦП
while(PORTCbits.RC4); // ожидать низкого уровня на входе
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad]=datain<<16; // загрузка данных в буфер, сброс бита SPIRBF
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad]+=datain<<8; // загрузка данных в буфер, сброс бита SPIRBF
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad++]+=datain; // загрузка данных в буфер, сброс бита SPIRBF
if(ucazad==filtrADC)ucazad=0; // инициализация указателя.
//калибровка
if(Bit.calADC) // если установлен выполнить калибровку
{
Bit.calADC=0; // сбросить флаг калибровки
SPI2BUF=0; //
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF; // сброс бита SPIRBF
}
_CNIF = 0; // сброс прерывания
}
Флаг Bit.calADC – предназначен для активирования режима калибровки. Данные загружаются в буфер ADCbufer[] размер которого может быть ограничен переменной filtrADC.
Это может быть интересно
 Простой цифровой вольтметр ch-c3200Views: 2687 В этой статье рассмотрен пример создания простого вольтметра постоянного тока на основе печатной платы ch-c0030pcb, а при возможности использования внешнего делителя и вольтметр переменного тока. Дан краткий принцип …
Простой цифровой вольтметр ch-c3200Views: 2687 В этой статье рассмотрен пример создания простого вольтметра постоянного тока на основе печатной платы ch-c0030pcb, а при возможности использования внешнего делителя и вольтметр переменного тока. Дан краткий принцип … Обновление ESP8266 c ESPFlashDownloadTool_v3.6.3Views: 3744 Технология обновления следующая: Загружаем программу со страницы espressif.com. Разархивируем. Где находятся файлы, для прошивки? Заходим в каталоги Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка). Запускаем программу, …
Обновление ESP8266 c ESPFlashDownloadTool_v3.6.3Views: 3744 Технология обновления следующая: Загружаем программу со страницы espressif.com. Разархивируем. Где находятся файлы, для прошивки? Заходим в каталоги Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка). Запускаем программу, … LED драйвер TM1639Views: 2485 TМ1639 позволяет работать на матрицу 8*8 или 8 семисегметных индикаторов. Может работать как на индикаторы с общим катодом, но и есть возможность подключать общим анодом. Для управления драйвером …
LED драйвер TM1639Views: 2485 TМ1639 позволяет работать на матрицу 8*8 или 8 семисегметных индикаторов. Может работать как на индикаторы с общим катодом, но и есть возможность подключать общим анодом. Для управления драйвером … УКВ – радиоприем, часть 2Views: 6445 Пришло свободное время решил вторую часть проекта реализовать (правда есть мысль и третью с использование цветного OLED и функцией ch-светомузыки, но это только задумка… Для понимания функций интегрального …
УКВ – радиоприем, часть 2Views: 6445 Пришло свободное время решил вторую часть проекта реализовать (правда есть мысль и третью с использование цветного OLED и функцией ch-светомузыки, но это только задумка… Для понимания функций интегрального … Простой цифровой милливольтметр постоянного токаViews: 4230 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля …
Простой цифровой милливольтметр постоянного токаViews: 4230 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля … Емкостной сенсорViews: 3246 Изучаем изготовление емкостных сенсоров на PIC-микроконтроллере. Конструкция емкостных сенсоров имеет вид: Емкостные сенсоры строятся по схеме высокочастотного генератора, сам принцип основан на измерение частоты этого генератора. Частота зависит …
Емкостной сенсорViews: 3246 Изучаем изготовление емкостных сенсоров на PIC-микроконтроллере. Конструкция емкостных сенсоров имеет вид: Емкостные сенсоры строятся по схеме высокочастотного генератора, сам принцип основан на измерение частоты этого генератора. Частота зависит … MAX7219/21 и 8х8 LED дисплеиViews: 1116 MAX7219, MAX7221 предназначены для вывода информации на 8 разрядов семисегментного индикатора, но на нем легко организовать вывод на светодиодные индикаторы 8х8. продолжение следует…. Это может быть интересно
MAX7219/21 и 8х8 LED дисплеиViews: 1116 MAX7219, MAX7221 предназначены для вывода информации на 8 разрядов семисегментного индикатора, но на нем легко организовать вывод на светодиодные индикаторы 8х8. продолжение следует…. Это может быть интересно APA102 – светодиоды со встроенным драйвером и SPI интерфейсомViews: 3605 APA102 В 2014 году фирма Shenzhen Led Color Optoelectronic Co., Ltd http://www.szledcolor.com/ начала производство светодиодов на драйвере APA102. Это серия так называемых светодиодов со встроенным драйвером. Основной особенностью этих …
APA102 – светодиоды со встроенным драйвером и SPI интерфейсомViews: 3605 APA102 В 2014 году фирма Shenzhen Led Color Optoelectronic Co., Ltd http://www.szledcolor.com/ начала производство светодиодов на драйвере APA102. Это серия так называемых светодиодов со встроенным драйвером. Основной особенностью этих … TDA7294 part 1Views: 508 TDA7294 має унікальні дані для створення підсилювачів звукової частоти HI-FI класу. Варіант застосування є конфігурація BRIDGE (мостова схема включення), де використовуються два TDA7294, як показано на схематичній діаграмі …
TDA7294 part 1Views: 508 TDA7294 має унікальні дані для створення підсилювачів звукової частоти HI-FI класу. Варіант застосування є конфігурація BRIDGE (мостова схема включення), де використовуються два TDA7294, як показано на схематичній діаграмі … Arduino LCD + STONE STVI056WT-01 + Strain gaugeViews: 694 Author li grey email: greyli1987@outlook.com The strain assessment instrument is used to assess the degree of corresponding muscle strain by obtaining the muscle surface action potential through silver …
Arduino LCD + STONE STVI056WT-01 + Strain gaugeViews: 694 Author li grey email: greyli1987@outlook.com The strain assessment instrument is used to assess the degree of corresponding muscle strain by obtaining the muscle surface action potential through silver …