
Views: 6416
Простой регулятор мощности с цифровой индикацией.

Этот проект создан как обучающий, для ознакомления с основами построения сетевых регуляторов мощности. Устройства подобного типа можно использовать для управления освещением, скоростью работы вентиляторов (электромоторов переменного тока), а также для регулировки мощности паяльника. Цифровая индикация позволяет косвенно судить о величине энергии подаваемой в нагрузку. Возможность сохранения заданных параметров в EPROMM контроллера позволяет избавиться от необходимости постоянной настройки при включении устройства. Регулятор не только запоминает, заданную мощность, но и текущее состояние. Если вы установили состояние “oF” – выключено. То при подаче питания регулятор будет в состоянии выключено. Если вы его будете отключать в состоянии включено (когда показывается заданная мощность), то и при подаче питания, будет также включена заданная мощность.
Схема регулятора.
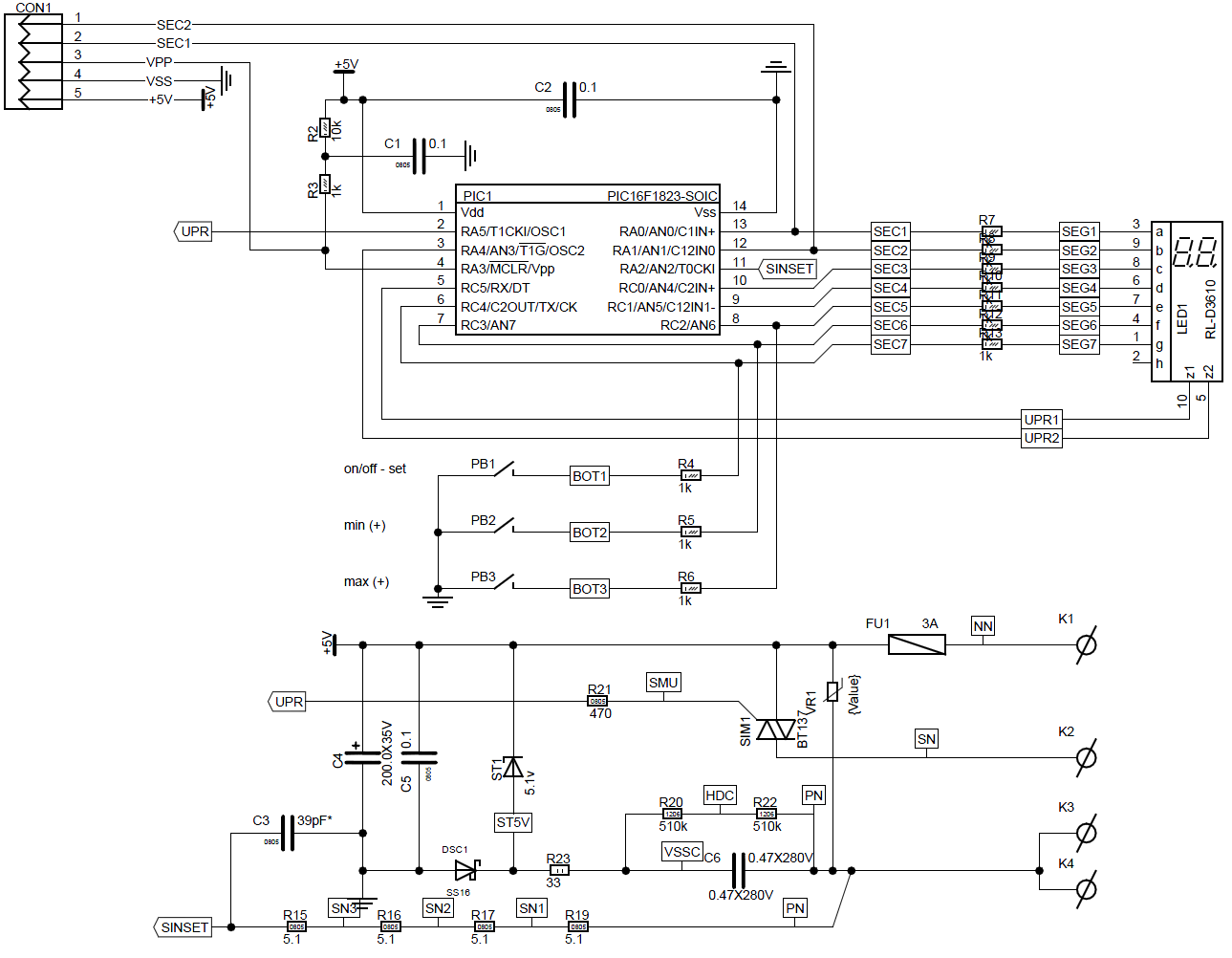
Регулятор собран на микроконтроллере фирмы Microchip PIC16F1823. Для питания используется конденсаторный источник питания.
 ВНИМАНИЕ. ВСЕ ЭЛЕМЕНТЫ УСТРОЙСТВА НАХОДЯТСЯ ПОД ПОТЕНЦИАЛОМ СЕТИ 230 ВОЛЬТ. БУДЬТЕ ОСОБЕННО ВНИМАТЕЛЬНЫ ПРИ НАЛАДКЕ УСТРОЙСТВА.
ВНИМАНИЕ. ВСЕ ЭЛЕМЕНТЫ УСТРОЙСТВА НАХОДЯТСЯ ПОД ПОТЕНЦИАЛОМ СЕТИ 230 ВОЛЬТ. БУДЬТЕ ОСОБЕННО ВНИМАТЕЛЬНЫ ПРИ НАЛАДКЕ УСТРОЙСТВА.
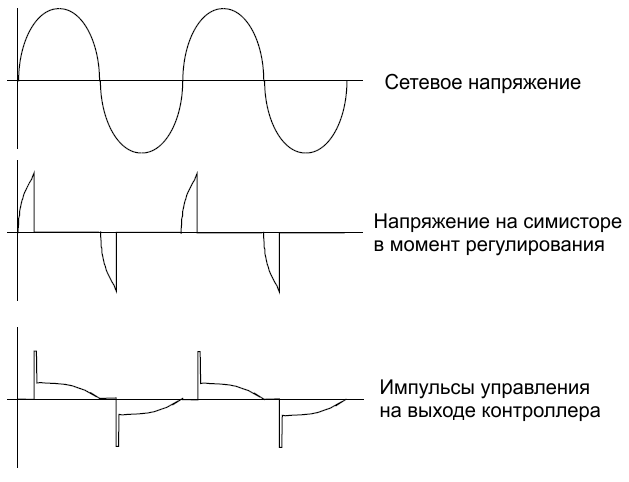
Для управления мощностью в регуляторе применяется фазовое регулирование с использованием задержки момента включения симистора. В качестве момента синхронизации используется точка перехода через ноль напряжения сети. К качестве формирователя импульса синхронизации используется свойства порта микроконтроллера ограничивать величину входного напряжения за счет защитных диодов. Рассмотрим электрическую схему порта микроконтроллера.

Резистор 20 мОм ограничивает входной ток до допустимого уровня, а диоды ограничиваю напряжение до уровня питания микроконтроллера. В микроконтроллере PIC16F1823 есть возможность организации прерывания по изменению состояний на входах. Для синхронизации мы настраиваем наш вход в регистрах IOCAN: и IOCAF: на активацию прерывания и по нарастанию, и по спаду сигнала. Этим мы получаем возможность для синхронизации в каждом полу-периоде.
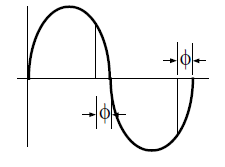
Для регулировки мощности нам необходимо изменять момент включения симистора.
Принцип такой чем мы раньше подает включающий импульс после момента синхронизации, тем больше мощности подается в нагрузку. Для регулировки мощности нам необходимо организовать задержку на включения симистора. Для этого будем использовать таймер TIMER1.
Принцип управления следующий, мы используем прерывания которое может формировать таймер при своем переполнении. В момент поступления импульса синхронизации, мы делаем предустановку таймера, на величину, необходимую для формирования нашей задержки. И включаем его. Таймер начинает отсчитывать время, при переполнении, программа переходит на формирования импульса управления симистором (таймер выключается). Далее все повторяется.
Как математически формируется задержка. Мы используем контроллер на максимальной частоте (люблю максимальные частоты, благо в этом устройстве нет необходимости для экономии потребления). Поэтому мы может на вход таймера подавать тактовую частоту 8 мГц. Если установить предделитель на 8, то на входе таймеры мы получим 1 мГц тактовой частоты.
Мы используем задание мощности от 0 до 100%. И нам необходимо регулировка по 1%. Длительность полупериода сети 50 Гц равна (100 Гц) = 0,01 сек. Длительность тактовой 0,000001 сек. В нашем случае мы получаем, что за один полупериод таймер насчитает 10 000 импульсов. На 1% мощности нам будет приходиться 100 импульсов.
У нас 16-битный таймер его полное значение 65535 (65536) импульсов. Для начала формирования задержки нам необходимо его предустанавливать на величину:
power_zag=65535-((100-power1)*100);
где: power_zag – значение которое мы загружаем в таймер, power1 – значение задание мощности в % (0-100).
После поступления импульса управления, симистор открывается и вся оставшееся мощность направляется в нагрузку. В момент перехода напряжения сети через ноль симистор закрывается. Обратите внимание, что для управления симистором используется “отрицательное напряжение”.
Питание схемы.
Так как для нас нет необходимости в большой мощности (но есть необходимость для питания индикатора) и предполагается, что элементы устройства в процессе эксплуатации всегда будут защищены от прикосновения, питание нашей схемы выполнено по схеме с конденсаторным делителем напряжения.
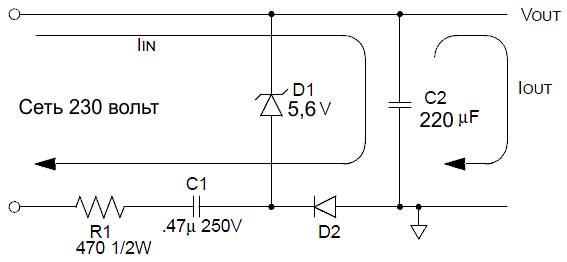
Назначение элементов. Резистор R1 предназначен для ограничение максимального тока через стабилитрон в момент включения или выключения устройства, а также в момент когда в сети могут появится высокочастотные помехи для которых сопротивление конденсатора становиться равным нулю.
Конденсатор C1 является нашим основным ограничителем тока для стабилитрона, на котором формируется напряжение питания. Для отрицательной полуволны стабилитрон полностью пропускает напряжение, а для положительной формирует на себе 5,6 вольта.
Диод D2 пропускает положительное напряжение и заряжает конденсатор C2 который используется для питание микроконтроллера.
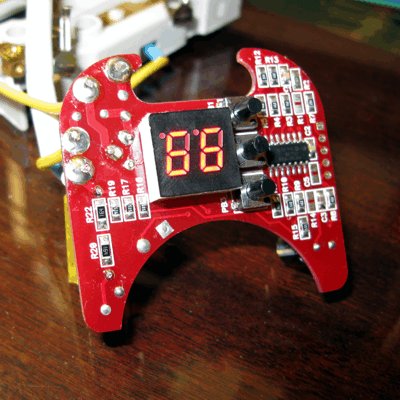
Регулятор в сборе.

Функции кнопок управления , верхняя включить-выключить, средняя увеличить мощность нижняя уменьшить. Регулятор сохраняет свои настройки при отключении от сети. В момент сохранения на индикаторе высвечивается сообщение “–” на пол секунды.
Видео проекта.
Печатная плата.
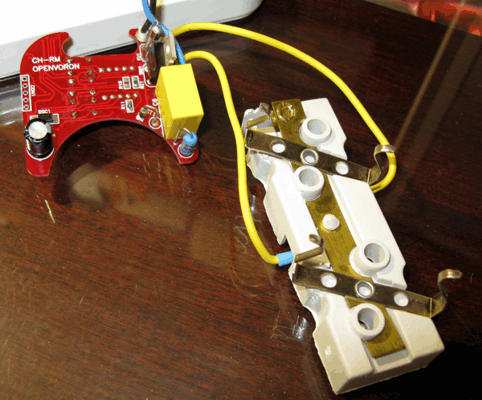
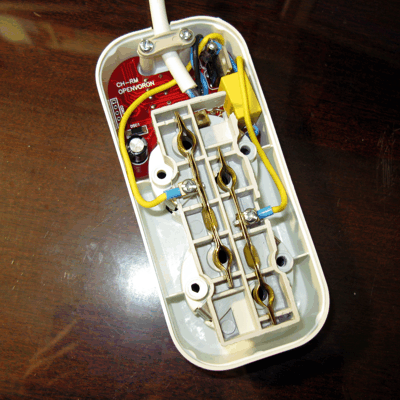
Для проекта была спроектирована печатная плата. Форма платы предназначена для возможности монтажа в розетку удлинителя.
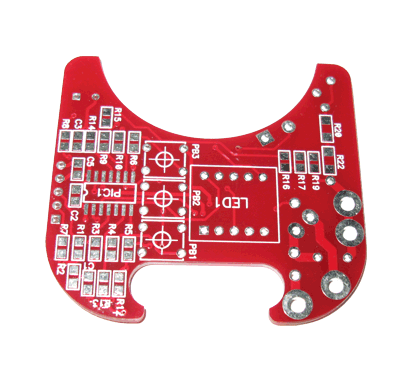 ВНИМАНИЕ. Приобрести плату можно в магазине ВОРОН (правда цену…).
ВНИМАНИЕ. Приобрести плату можно в магазине ВОРОН (правда цену…).
Фотографии проекта:

Прошивка для регулятора, индикатор общий анод v-1.0
Простой цифровой регулятор мощности - прошивка v1.0 2.00 KB 1472 downloads
Простой цифровой регулятор мощности - прошивка...Простой цифровой регулятор мощности - проект v2.0 57.29 KB 202 downloads
Простой цифровой регулятор мощности - проект...Простой цифровой регулятор мощности - схема 14.12 KB 200 downloads
Простой цифровой регулятор мощности - схема ...Простой цифровой регулятор мощности - схема в PCAD2006 25.71 KB 89 downloads
Простой цифровой регулятор мощности - схема...Это может быть интересно
 CLUBBEST – reasoning on the visualization of music.Views: 113 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для …
CLUBBEST – reasoning on the visualization of music.Views: 113 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для … Проект с использованием MCC часть 10Views: 801 Алгоритм управления освещением от нажатия кнопки. Обработка удержания кнопки: Мы должны проверить кнопка в настоящий момент нажата и флаг удержания установлен, если да Проверить таймер удержания “отработал” – …
Проект с использованием MCC часть 10Views: 801 Алгоритм управления освещением от нажатия кнопки. Обработка удержания кнопки: Мы должны проверить кнопка в настоящий момент нажата и флаг удержания установлен, если да Проверить таймер удержания “отработал” – … LATINO – открытый проект ch-светомузыкиViews: 1642 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была …
LATINO – открытый проект ch-светомузыкиViews: 1642 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была … MPLAB® Code Configurator and EncoderViews: 1401 Еще раз про энкодер… Для некоторых приложений очень удобно и экономически выгодно, для настройки и управления использовать энкодер. Такие энкодеры имеют строенную тактовую кнопку которую можно применить для выбора …
MPLAB® Code Configurator and EncoderViews: 1401 Еще раз про энкодер… Для некоторых приложений очень удобно и экономически выгодно, для настройки и управления использовать энкодер. Такие энкодеры имеют строенную тактовую кнопку которую можно применить для выбора … Стабилизатор тока на SN3350, часть 2Views: 1147 Если вам необходимо разработать устройство с применением мощных светодиодов, то никак не обойтись без применения стабилизатора тока. На настоящий момент стабилизаторы тока являются самым эффективным механизмом, для питания светодиода в течение всего …
Стабилизатор тока на SN3350, часть 2Views: 1147 Если вам необходимо разработать устройство с применением мощных светодиодов, то никак не обойтись без применения стабилизатора тока. На настоящий момент стабилизаторы тока являются самым эффективным механизмом, для питания светодиода в течение всего … JDY-62A Audio bluetooth moduleViews: 1643 Простой модуль для простого аудио блютуса. Встроенные подсказки на английском языке. Модуль включён, режим муте – после подачи питания. Контроль разряда батареи предупреждение что батарея разряжена и необходима …
JDY-62A Audio bluetooth moduleViews: 1643 Простой модуль для простого аудио блютуса. Встроенные подсказки на английском языке. Модуль включён, режим муте – после подачи питания. Контроль разряда батареи предупреждение что батарея разряжена и необходима … Униполярный шаговый двигательViews: 2147 В приводах различных устройств часто применяются шаговые двигатели, Шаговый двигатели различают двух типов униполярные – когда обмотки коммутируются током текущим только в одну сторону, например при …
Униполярный шаговый двигательViews: 2147 В приводах различных устройств часто применяются шаговые двигатели, Шаговый двигатели различают двух типов униполярные – когда обмотки коммутируются током текущим только в одну сторону, например при … Самый простой диммер для светодиодного освещенияViews: 2976 Светодиоды все больше входят в нашу жизнь как источники освещения и как само собой разумеющееся, это вопрос регулировки яркости. Существует множество схемных решений, но в нашем варианте мы …
Самый простой диммер для светодиодного освещенияViews: 2976 Светодиоды все больше входят в нашу жизнь как источники освещения и как само собой разумеющееся, это вопрос регулировки яркости. Существует множество схемных решений, но в нашем варианте мы … Altium Designer my Libraries, Project templates, System settings by Catcatcat V24.0 PROViews: 141 Назвемо цей варіант поновлення для професіоналів і не тільки. Що нового? 1. Повністю змінено структуру параметрів бази даних компонента. Це дозволило повноцінної роботи Актив ВОМ. Ви відразу отримуєте …
Altium Designer my Libraries, Project templates, System settings by Catcatcat V24.0 PROViews: 141 Назвемо цей варіант поновлення для професіоналів і не тільки. Що нового? 1. Повністю змінено структуру параметрів бази даних компонента. Це дозволило повноцінної роботи Актив ВОМ. Ви відразу отримуєте … Интерактивные LedViews: 453 Тема проекта продолжение следует…. Это может быть интересно
Интерактивные LedViews: 453 Тема проекта продолжение следует…. Это может быть интересно