
Views: 1595
RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как есть ошибки даже в описании производителя.

http://www.raystar-optronics.com/products-category-detail.php?lang=ru&ProID=370
http://www.raystar-optronics.com/products-category.php?lang=ru&CID=3
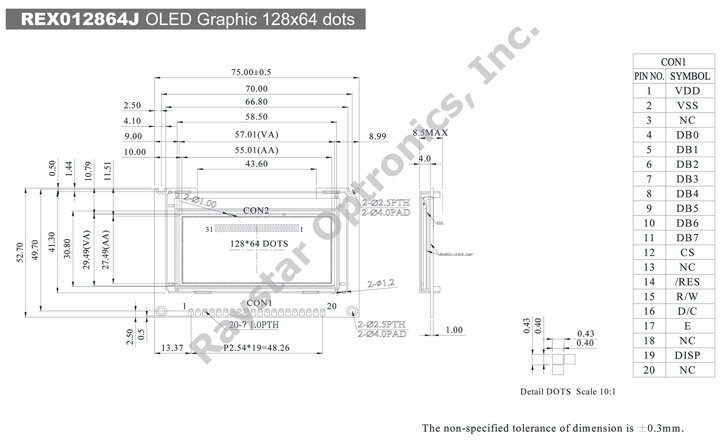
Внимание, в заводском pdf описана распиновка для интерфейса 6080, а индикатор настроен на 8080.

| RET012864E/REX012864J | ||||||||
| Resolution | Picture | Raystar P/N | Size | Duty | Type | Color | Bulit-in Controller | Interface |
| 128×64 |  |
RET012864E REX012864J |
2.36″ | 1/64 | Graphic | Y | SSD1309Z | default 8080,option 6800,SPI |
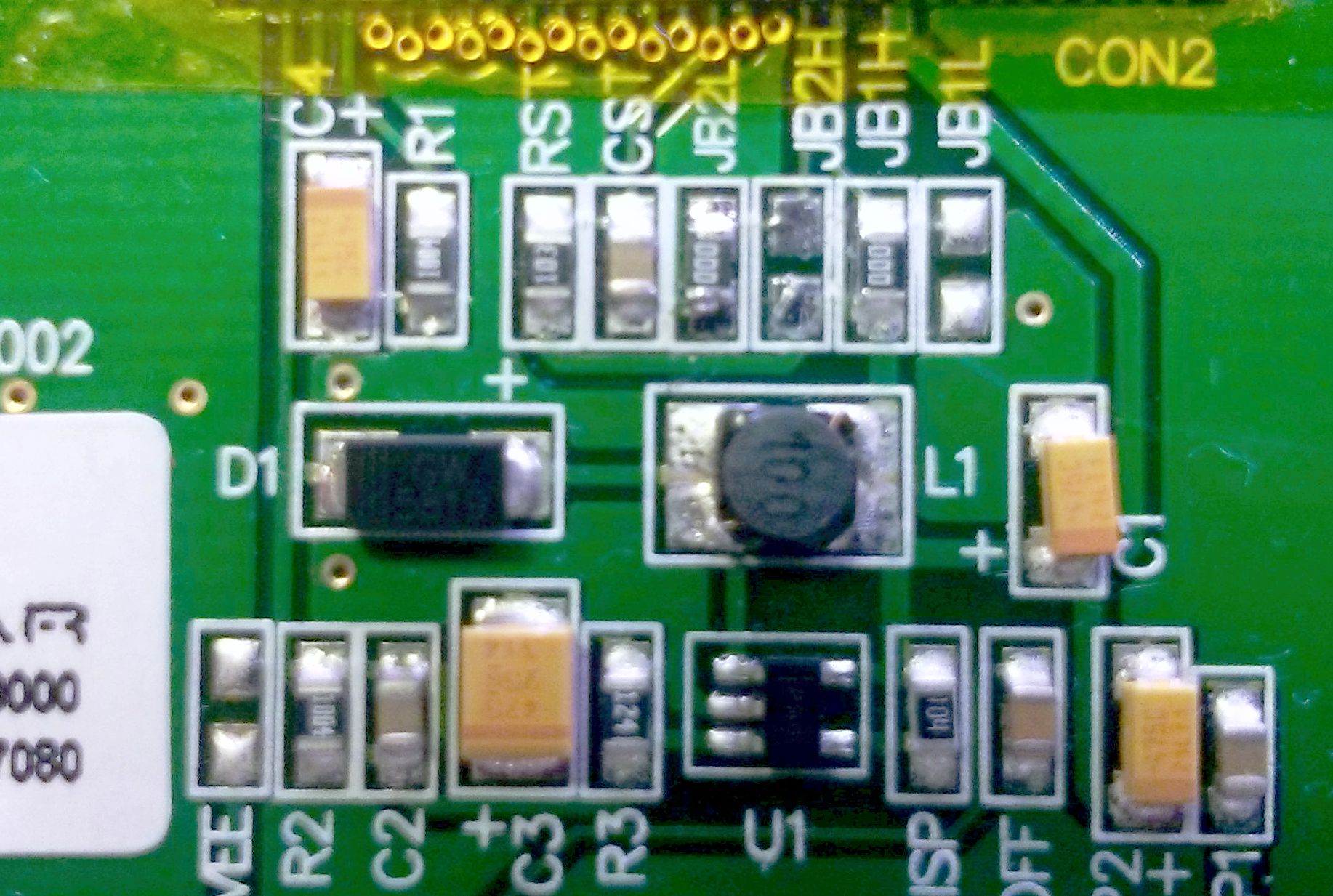
Драйвер SSD1309Z позволяет работать с 4 интерфейсами. Сборка индикатора по умолчанию настроен на параллельный 8080 выбор интерфейса можно изменить перепаяв резисторы на плате индикатора.
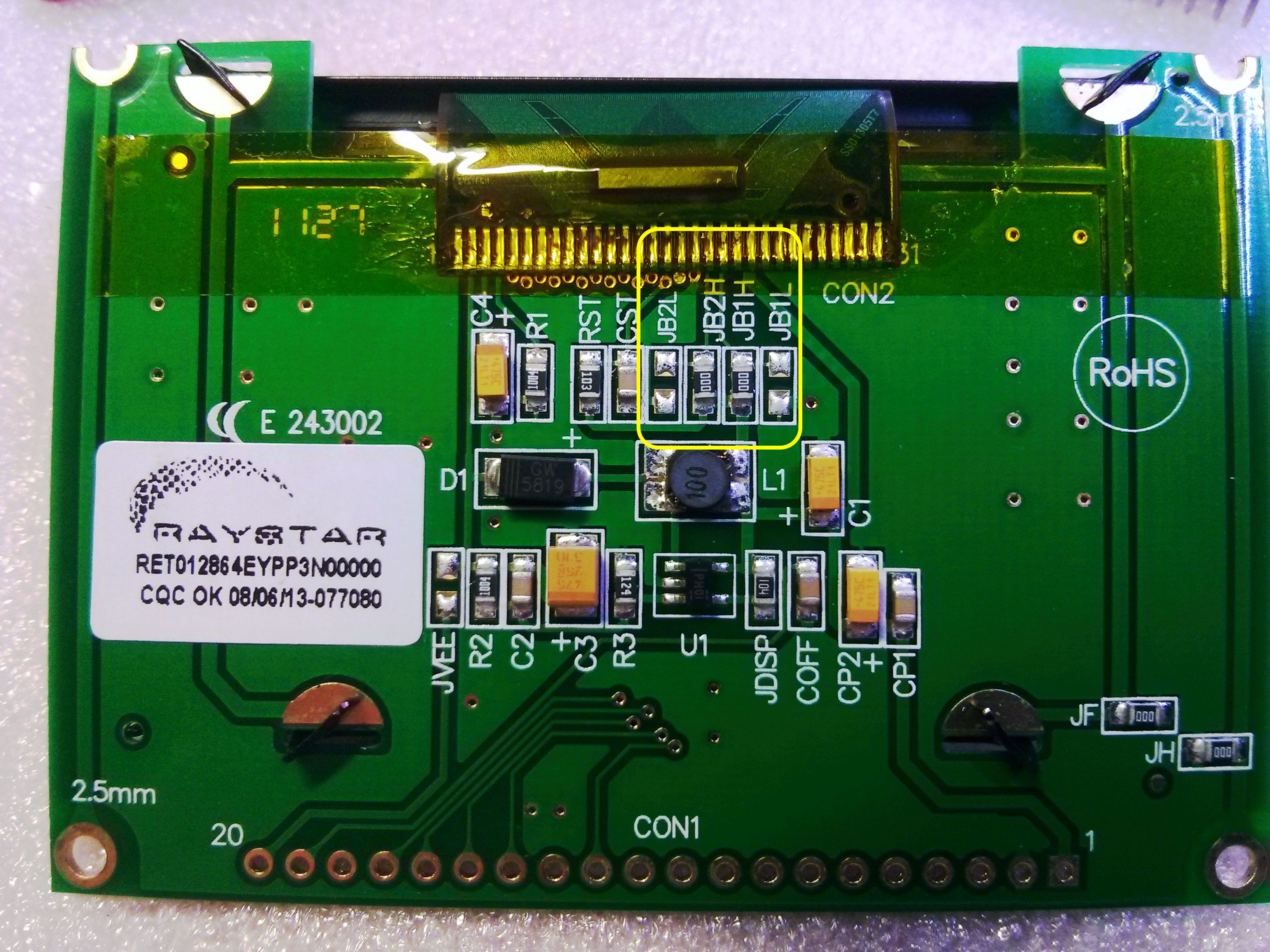
| Выбор интерфейса индикатора | ||||
| Название переключателя | 8080 | 6800 | SPI | I2C |
| JB1H | √ | √ | ||
| JB1L | √ | √ | ||
| JB2H | √ | √ | ||
| JB2L | √ | √ | ||
Назначение выводов индикатора для выбранного интерфейса
| Назначение выводов | |||||
| Номер вывода | 8080 | 6800 | SPI | I2C | Примечание |
| 1 | VDD | VDD | VDD | VDD | Питание 3,3 В |
| 2 | VSS | VSS | VSS | VSS | Общий |
| 3 | NC | NC | NC | NC | Не подключен |
| 4 | DB0 | DB0 | SCLK | SCL | |
| 5 | DB1 | DB1 | SDIN | SDAIN | |
| 6 | DB2 | DB2 | NC | SDAOUT | |
| 7 | DB3 | DB3 | под. VSS | под. VSS | |
| 8 | DB4 | DB4 | под. VSS | под. VSS | |
| 9 | DB5 | DB5 | под. VSS | под. VSS | |
| 10 | DB6 | DB6 | под. VSS | под. VSS | |
| 11 | DB7 | DB7 | под. VSS | под. VSS | |
| 12 | CS | CS | CS | под. VSS | |
| 13 | NC | NC | NC | NC | Не подключен |
| 14 | RES# | RES# | RES# | RES# | |
| 15 | WR# | R/W# | под. VSS | под. VSS | |
| 16 | D/C | D/C | D/C | SA0 | |
| 17 | RD# | E | под. VSS | под. VSS | |
| 18 | NC | NC | NC | NC | Не подключен |
| 19 | DISP | DISP | DISP | DISP | Включение высоковольтного преобразователя.
0- выкл. 1- вкл. |
| 20 | NC | NC | NC | NC | Не подключен |
Примечание: под. VSS – вывод должен быть подключен к Vss. NC – вывод должен быть оставлен не подключенным (в воздухе).
Краткое описание работы интерфейсов.
MCU Parallel 6800-series Interface
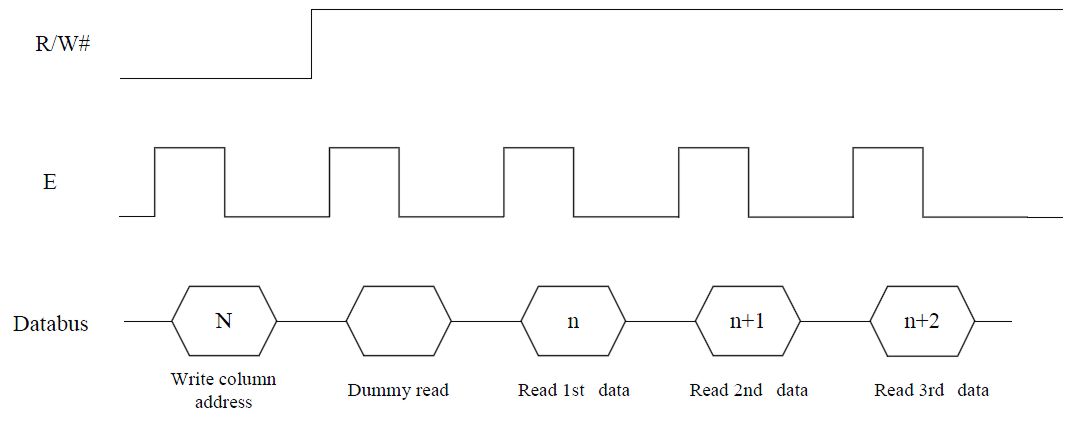
Параллельный интерфейс состоит из 8 двунаправленными линий данных (D [7: 0]), R/W#, D/C#, Е и CS#.
R/W# – НИЗКИЙ уровень на R/W# указывает на операцию записи, ВЫСОКИЙ на R/W# обозначает операцию чтения.
D/C# – НИЗКИЙ уровень на D/C# указывает на чтения/записи команды, ВЫСОКИЙ на D/C# указывает на чтения/записи данных.
Е – вход E служит фиксации данных, в то время когда сигнал CS# в низком уровне. Данные фиксируются по заднему фронту сигнала E.
CS# – вход выбора индикатора.
| 6800 | ||||
| Функция | E | R/W# | CS# | D/C# |
| Запись команды | ↓ | L | L | L |
| Чтение статуса | ↓ | H | L | L |
| Запись данных | ↓ | L | L | H |
| Чтение данных | ↓ | H | L | H |
Примечание:
↓ – означает выполнение функции по заднему фронту сигнала
Н – означает высокий уровень в сигнале
L – означает низкий уровень в сигнале
Небольшая особенность при чтении данных, первое чтение надо пропустить.
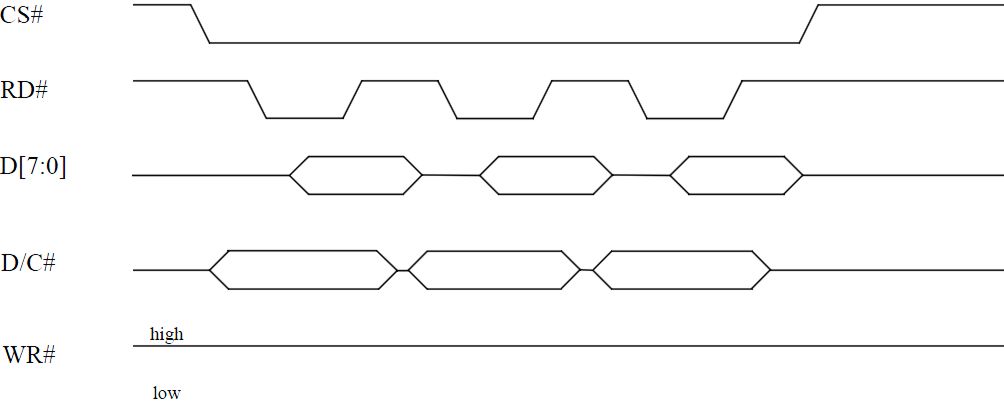
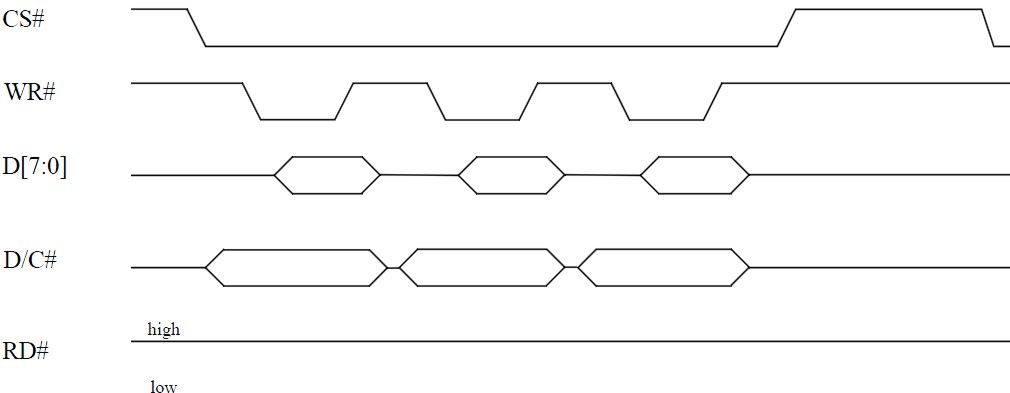
MCU Parallel 8080-series Interface
Параллельный интерфейс состоит из 8 двунаправленными линий данных (D[7: 0]), RD#, WR#, D/C# и CS#.
D/C# – НИЗКИЙ уровень на D/C# указывает на чтения/записи команды, ВЫСОКИЙ на D/C# указывает на чтения/записи данных.
RD# – Передний фронт на входе RD# активирует считывания данных сигнала фиксации их на шине данных, в то время как CS# поддерживается на низком уровне.
WR# – Переднему фронту на входе WR# активирует запись команды/данных установленных на шине в драйвер, в то время как CS# поддерживается на низком уровне.
Чтение:
Запись:
| 8080 (Form 1) | ||||
| Функция | RD# | WR# | CS# | D/C# |
| Запись команды | H | ↑ | L | L |
| Чтение статуса | ↑ | H | L | L |
| Запись данных | H | ↑ | L | H |
| Чтение данных | ↑ | H | L | H |
| 8080 (Form 2) | ||||
| Функция | RD# | WR# | CS# | D/C# |
| Запись команды | H | L | ↑ | L |
| Чтение статуса | L | H | ↑ | L |
| Запись данных | H | L | ↑ | H |
| Чтение данных | L | H | ↑ | H |
Примечание:
↓ – означает выполнение функции по заднему фронту сигнала
Н – означает высокий уровень в сигнале
L – означает низкий уровень в сигнале
Небольшая особенность при чтении данных, первое чтение надо пропустить.
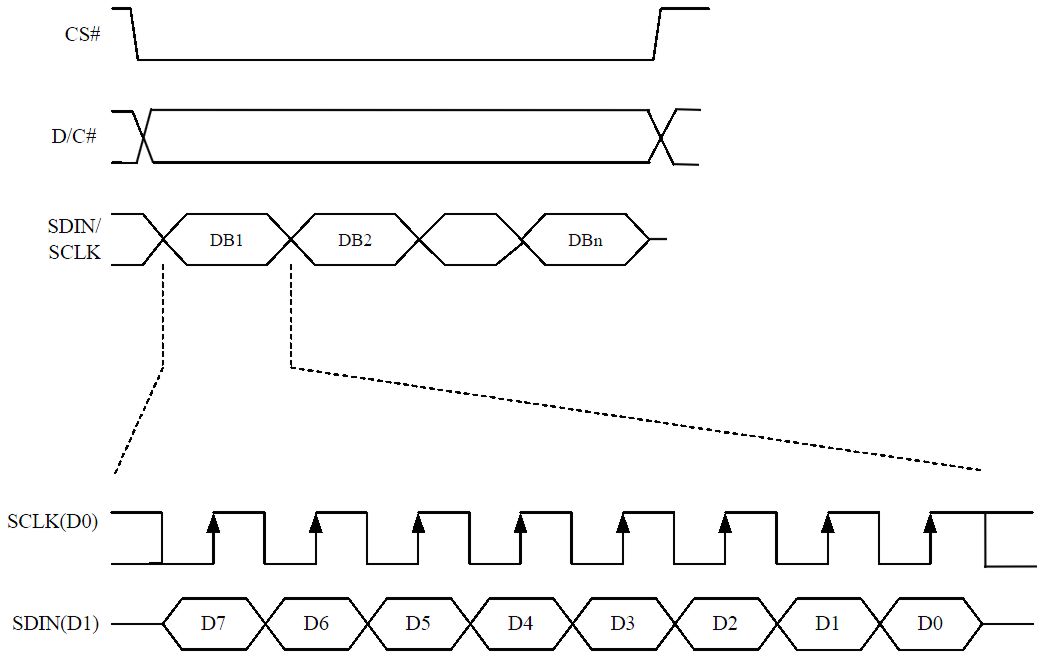
MCU Serial Interface (SPI)
Последовательный интерфейс состоит из последовательного тактового сигнала SCLK, последовательных данных SDIN, D/C#, CS#. В режиме SPI, D0 действует как SCLK, D1 действует как SDIN. Для неиспользованных контактов данных, D2 следует оставить открытым. Входы от D3 до D7, Е и R/W# может быть подключены к Vss.
| 8080 (Form 2) | |||||
| Функция | E(RD#) | R/W#(WR#) | CS# | D/C# | D0 |
| Запись команды | под. VSS | под. VSS | L | L | ↑ |
| Запись данных | под. VSS | под. VSS | L | H | ↑ |
Процедура записи данных в драйвер индикатора
MCU I2C Interface
Интерфейс I2C состоит из ведомого устройства (бит адреса SA0), сигнала передачи данных SDA (SDAOUT /D2 для вывода и SDAIN/D1 для ввода данных) и тактовый сигнал SCL (D0). Обе шины данных и синхронизации должны быть подключены к нагрузочным резисторам. RES# используется для инициализации устройства.
Адрес ведомого устройства бит (sa0)
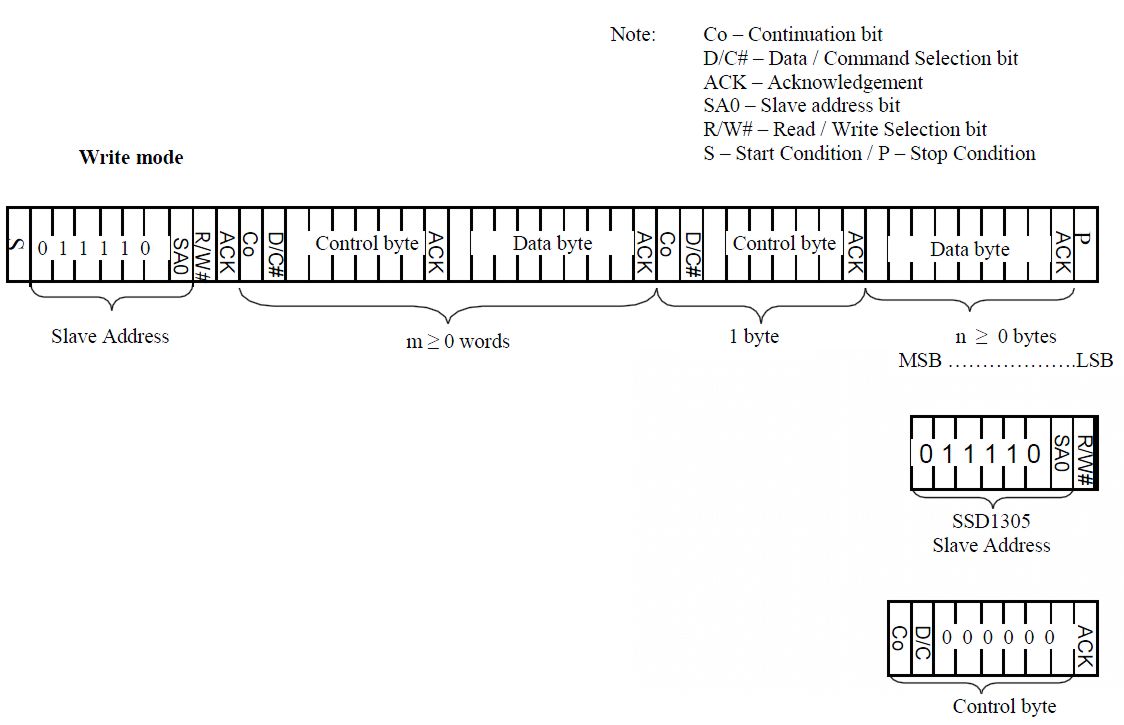
SSD1305 должен принять, адрес ведомого устройства, прежде чем начать передавать или получать любую информацию в от I2C шины. Устройство будет реагировать на адрес ведомого устройства согласно бита “SA0” адреса и выполнять операцию чтения/записи согласно бита “R/W#” со следующим форматом байта:
| I2C | |||||||
| b7 | b6 | b5 | b4 | b3 | b2 | b1 | b0 |
| 0 | 1 | 1 | 1 | 1 | 0 | SA0 | R/W# |
“SA0” бит обеспечивает расширения для подчиненного адреса. Адрес “0111100” или “0111101”, может быть выбран в качестве подчиненного адреса для SSD1305. Вход D/C# определяет значение для SA0, выбора адреса ведомого устройства.
R/W# бит используется для определения режима работы интерфейса I2C – шины. R/W# = 1 – режим чтения. R/W# = 0, – режим записи.
Формат шины I2C
Настройка индикатора для работы с I2C интерфейсом
Описание формата передачи данных и команд по шине I2C.
- Ведущее устройство инициирует передачу данных по условию СТАРТ.
- Передача адреса ведомого устройства (драйвера индикатора). Для SSD1309Z, адрес ведомого устройства может быть 0b0111100(R/W#) или 0b0111101(R/W#) путем установки бита SA0 в “0” или “1” (вход D/C предназначен для установки состояния бита SA0).
- Режим записи устанавливается путем установки бита R/W# в “0”.
- Сигнал подтверждения будет сгенерирован после получения одного байта данных, включая адрес ведомого и бита R/W#.
- После передачи адреса ведомого, либо управляющего байта, или байт данных, может быть отправлен через SDA. Контрольный байт состоит главным образом из Co и D/C# битов далее следуют шесть “0”.
а. Если Со бит установлен в логический “0” – далее будет следовать передача только одного байта, “1” – последовательность байт.
б. D/C# бит определяет следующий байт данных действует в качестве команды или данных. Если бит D/C# установлен в логический “0”, он определяет следующий байт данных в качестве команды. Если бит D/C# установлен в логическую “1”, он определяет следующий байт данных в качестве данных, которые будут записываться(читаться) в GDDRAM. Указатель столбца GDDRAM адрес будет увеличено на единицу автоматически после каждой записи данных. - Бит ACK будет сгенерирован после приема каждого байта управления или байт данных.
- Режим записи будет завершен, когда применяется условие СТОП.
Пожалуйста, следует отметить, что передача бита данных имеет некоторые ограничения.
1. Бит данных, который передается во время каждого импульса SCL, должен держать в стабильном состоянии в “высокий” период тактового импульса. За исключением начала или условия останова, линия передачи данных может быть включен только тогда, когда SCL низкий.
2. Обе линии передачи данных (SDA) и линия синхронизации (SCL) должен быть подтянуты к Vcc внешними резисторами (1,8к для 400кГ).
продолжение следует…
Это может быть интересно
 Гаджеты для домашней автоматики – Датчик приближенияViews: 2164 Управление светодиодным освещением – Датчик приближения. Данный гаджет предназначен для управления внутренним освещением мебели. Датчик позволяет определить закрытие или открытие дверцы или ящика и при этом включать или …
Гаджеты для домашней автоматики – Датчик приближенияViews: 2164 Управление светодиодным освещением – Датчик приближения. Данный гаджет предназначен для управления внутренним освещением мебели. Датчик позволяет определить закрытие или открытие дверцы или ящика и при этом включать или … Ссылки на интересные источникиViews: 979 Сбор 3D моделей от André L’Hérault конденсаторы, резисторы, индуктивности dropbox IPC-SM-782 Surface Mount Design and Land Pattern Standard Видео уроки по Altium designer Alexey Sabunin https://www.youtube.com/channel/UCG7N5CqXpyK8nQjr1EmMgng Сергей Булавинов https://www.youtube.com/channel/UCISAMXRnN_Qw9UTjUwZI1Jw Robert Feranec https://www.youtube.com/user/matarofe …
Ссылки на интересные источникиViews: 979 Сбор 3D моделей от André L’Hérault конденсаторы, резисторы, индуктивности dropbox IPC-SM-782 Surface Mount Design and Land Pattern Standard Видео уроки по Altium designer Alexey Sabunin https://www.youtube.com/channel/UCG7N5CqXpyK8nQjr1EmMgng Сергей Булавинов https://www.youtube.com/channel/UCISAMXRnN_Qw9UTjUwZI1Jw Robert Feranec https://www.youtube.com/user/matarofe … NS108-5050-16bit от NewstarViews: 688 Кто уже использует в своих проектах адресуемые светодиоды хорошо знакомы с такими как WS2812 и им подобные. Эти светодиоды для управления используют однопроводную шину. Из-за этого пропускная способность …
NS108-5050-16bit от NewstarViews: 688 Кто уже использует в своих проектах адресуемые светодиоды хорошо знакомы с такими как WS2812 и им подобные. Эти светодиоды для управления используют однопроводную шину. Из-за этого пропускная способность … Сумеречное релеViews: 1642 Реле управления освещением, датчик день-ночь – одним словом фотореле для управления освещением или формирования сигнала для системы умный дом о понижении или повышении освещенности относительно заданного уровня. Реле выполнено по классической схеме, конденсаторный блок питания, от сети переменного тока …
Сумеречное релеViews: 1642 Реле управления освещением, датчик день-ночь – одним словом фотореле для управления освещением или формирования сигнала для системы умный дом о понижении или повышении освещенности относительно заданного уровня. Реле выполнено по классической схеме, конденсаторный блок питания, от сети переменного тока … MCC – K42 – настройка модуля DMAViews: 976 MCC – в версии v.3.95.0 и начиная ядра 4.85.0 конфигуратор предоставляет графический интерфейс для настройки модуля DMA. Для начала: Посмотреть какая версия МСС можно в закладке версии, если …
MCC – K42 – настройка модуля DMAViews: 976 MCC – в версии v.3.95.0 и начиная ядра 4.85.0 конфигуратор предоставляет графический интерфейс для настройки модуля DMA. Для начала: Посмотреть какая версия МСС можно в закладке версии, если … Game, exercise machine – Logic Gates.Views: 17 Game, exercise machine – Logic Gates. A game, a simulator, a gift – the development of logical thinking. The game is designed to develop logical thinking in children, …
Game, exercise machine – Logic Gates.Views: 17 Game, exercise machine – Logic Gates. A game, a simulator, a gift – the development of logical thinking. The game is designed to develop logical thinking in children, … Altium Designer my setup system and project structure V23.3Views: 407 Оновлення бази даних та шаблонів від березня 2023 року. Updating the database and templates from March 2023. Altium Designer my Libraries, Project templates, System settings by Catcatcat. Дивись …
Altium Designer my setup system and project structure V23.3Views: 407 Оновлення бази даних та шаблонів від березня 2023 року. Updating the database and templates from March 2023. Altium Designer my Libraries, Project templates, System settings by Catcatcat. Дивись … LED модуль P10 (1R) V706AViews: 7946 Это еще одно чудо от китайского брата. Это монохромные матрицы, называются они P10 (1R) V706A, ну типа R-красные, но не верьте паяют светики и зеленые и синие, в общем …
LED модуль P10 (1R) V706AViews: 7946 Это еще одно чудо от китайского брата. Это монохромные матрицы, называются они P10 (1R) V706A, ну типа R-красные, но не верьте паяют светики и зеленые и синие, в общем … CCP – модуль в режиме Compare на примере PIC18Views: 3246 CCP – модуль можно использовать в трех режимах: Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями. Compare – позволяет …
CCP – модуль в режиме Compare на примере PIC18Views: 3246 CCP – модуль можно использовать в трех режимах: Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями. Compare – позволяет … NeoPixel LED and PIC24Views: 753 Популярность однопроводной шины для управления светодиода типа WS2812 не ослабевает, а новые типы светодиодов в корпусах 3,5*3,5мм, 2,0*2,0мм становяться все больше привлекательными. Построение дисплеев для анимации требуют все …
NeoPixel LED and PIC24Views: 753 Популярность однопроводной шины для управления светодиода типа WS2812 не ослабевает, а новые типы светодиодов в корпусах 3,5*3,5мм, 2,0*2,0мм становяться все больше привлекательными. Построение дисплеев для анимации требуют все …