Views: 1030
MCC – в версии v.3.95.0 и начиная ядра 4.85.0 конфигуратор предоставляет графический интерфейс для настройки модуля DMA.
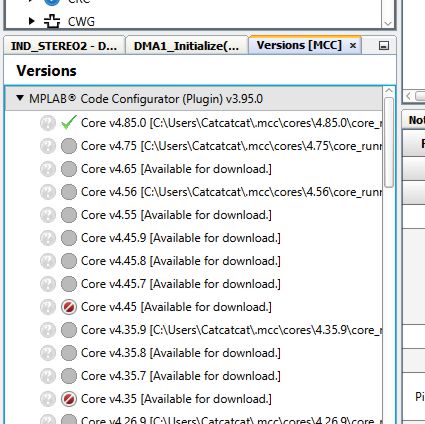
Для начала: Посмотреть какая версия МСС можно в закладке версии, если у вас не так, обновите МСС и задайте последнюю версию ядра, а иначе ничего не получиться.
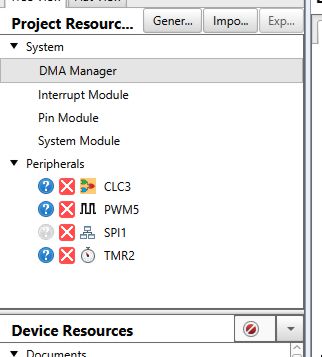
Модуль DMA в конфигураторе представлен как системный ресурс:
При выборе нам предоставиться окно настройки:

В первой колонки – DMA Channels – видны доступные модули. Устанавливая птичку мы можем активировать соответствующий модуль.
Во второй колонке – Scr Module – нам будет предоставлено возможность выбрать источник данных:
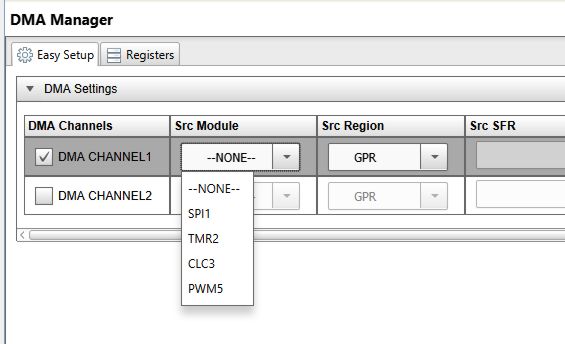
Выбор предоставляется из тех модулей которые вы загрузили в ресурсы проекта:
Колонка три – Src Region – выбор области памяти, тип памяти, из которой будут получены данные:
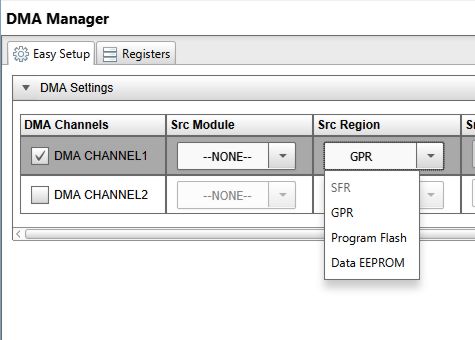
SFR – область регистров, физические регистры
GPR – область ОЗУ, оперативная память микроконтроллера
Program Flash – область флэш памяти
Data EEPROM – область EEPROM
Выбор региона будет определяться выбором источника, если вы выберите модуль (например, SPI), предоставленный во второй колонке Scr Module, то вам будет предоставлена возможность выбора только область регистров SFR
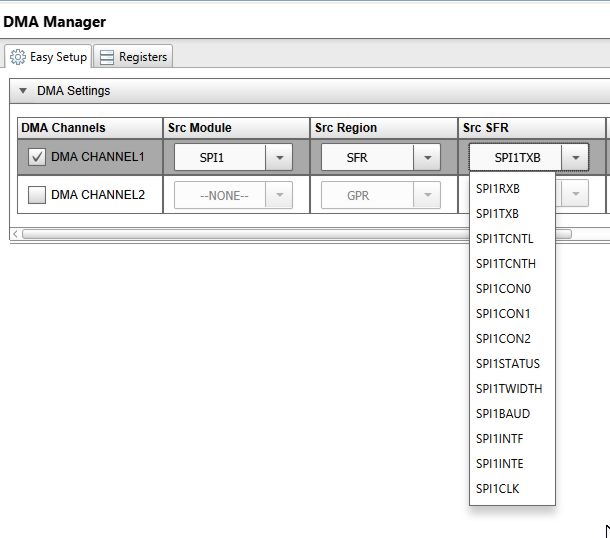
И тогда вы сможете указать из ко кого регистра вам необходимо получать данные, если вы не выбираете модуль, то вам предоставить возможность получение данных, только с областей памяти, а выбор регистров модулей будет недоступен.
Рассмотрим случай когда вам необходимо читать данные из буфера расположенного в оперативной памяти, для это во второй колонке оставим выбор –NONE– далее в колонке – Src VarName – зададим имя области или буфера данных, имя массива, область данных расположенных в оперативной памяти.
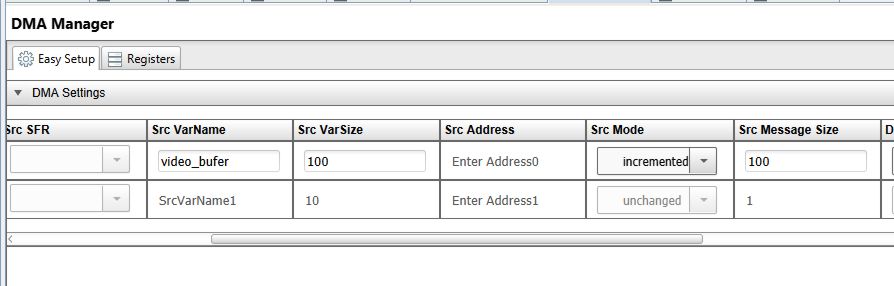
В колонке – Src VarSize – зададим размер данных в байтах, например, размер нашего буфера 100 байт
В колонке – Src Mode – укажем режим работы при чтении данных с источника, в нашем варианте мы указали на начало массива расположенного в памяти, данные необходимо читать и перемещать, т.е увеличивать, поэтому выбираем значение incremented.
В колонке – Src Message Size – зададим размер наших данных, т.е размер данных который необходимо передать в приемник для выполнения одной полноценной передачи данных в байтах.
При генерации и получим два файла библиотеки dma1, при этом в заголовочном файле dma1.h будет внесен наш буфер
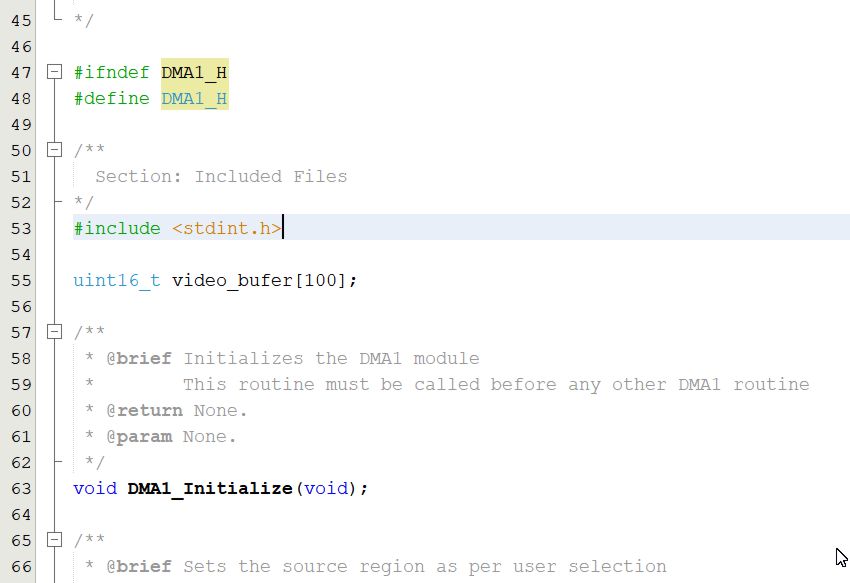
По умолчанию массив описан как uint16_t но мы можем это изменить указав требуемый размер данных, также мы можем его перенести в необходимые для нас файлы, но при этом необходимо будет указать через #include расположение нашего буфера.
Т.е надо понимать что параметры Src VarName и Src VarSize влияют на создание массива uint16_t video_bufer[100]; а вот параметр Src Message Size – укажет DMA какое количество байт необходимо за один цикл передать от источника к приемнику.
Теперь перейдем куда нам необходимо передавать данные.

В нашем примере введем модуль SPI1 Его выбираем в открывающемся списке из активных модулей (модуль необходимо за ранее добавить в ресурсы проекта).
В колонке – Dst Module – выбираем устройство приема данных (SPI1).
В колонке – Dst Region– выбираем тип памяти (при выборе модуля, МСС автоматически ограничит наш выбор памяти, SFR)
В колонке – Dst SFR – выбираем имя регистра куда будут перемещаться данные SPI1TXB

В колонки – Dst VarName и Dst VarSize – мы пропускаем, так как они не имеют смысл для выбора Dst Module – SPI1, Dst Region – SFR, Dst SFR – SPI1TXB. Эти колонки предназначены для описания указателей если данные будут передаваться в область памяти.
В следующих полях
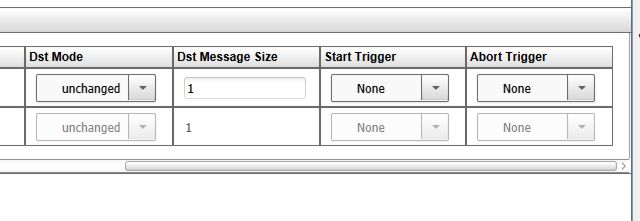
В колонке – Dst Mode – выберем unchanged – указатель остается неизменным после каждого завершения передачи, потому, что у нас всего одна ячейка памяти куда переносятся данные, это передатчик модуля SPI.
В колонках – Start Trigger – и – Abort Trigger – устанавливаем значение при необходимости, когда необходимо событие для запуска модуля DMA или его остановки. Если установлено значение –, то запуск и остановка возможна, например одним из вариантов это установкой или снятием бита DGO в регистре DMAxCON0. Этот вариант напомню считается мягкой остановкой модуля, с возможностью возобновления работы с места остановки.
В этом варианте если мы запустим работу модуля DMA будет выполнена передача всего одного байта. Т.к. приемник позволяет за один раз всего один байт и по этому размер его равен единицы. Вследствие чего перезагрузка указателя остановит работу модуля DMA.
В этими настройками нам необходимо будут проверять состояние бита и когда он будет аппаратно сброшен устанавливать его для активации новой транзакции:
while (DMA1CON0bits.DGO);
DMA1CON0bits.DGO = 1;
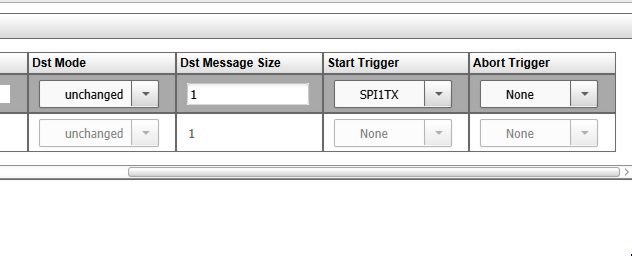
Но как показала практика такой метод не совсем эффективен. Если нам необходимо выполнить за раз передачу всех данных с буфера, то необходимо организовать запуск модуля через прерывания от внешнего события или от самого себя. Для этого воспользуемся колонкой Start Trigger для определения условия перезапуска. Выберем, что бы модуль перезапускается от после выполнения события от передачи данных передатчиком модуля SPI
Для большего понимания логики, необходимо еще настроить режим работы. Например, нам необходимо, чтобы данные из нашего буфера постоянно, после запуска DMA извлекались из буфера и передавались на SPI модуль, для этого необходим в регистре DMAxCON1: сбросить бит остановки DSTP (от счетчика приемника). При этом перезагрузка указателя модуля приемника не будет вызывать сброс флага SIRQEN разрешения запуска по внешнему событию. А когда чтение с буфера достигнет конца, после перезагрузки указателя источника SSTP, только тогда работа модуля DMA приостановиться.
Вариант настройки регистра
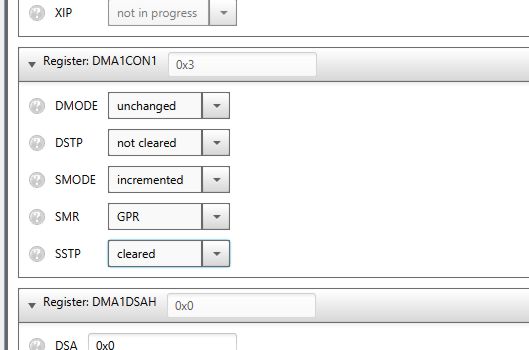
В этом варианте, только после передачи всех данных, будет выполнена остановка модуля DMA.
Для запуска необходимо выполнить функцию DMA1_StartTransferWithTrigger() из библиотеки DMA или команду DMA1CON0bits.SIRQEN = 1; что в принципе одно и тоже.
По логике если и перевести SSTP в состояние not cleared передача с буфера будет, после запуска модуля, выполняться непрерывно.
Выполним генерацию, в регистрах вы можете увидеть следующие настройки.
void DMA1_Initialize(void)
{
//Source Address : video_bufer
DMA1SSA = &video_bufer;
//Destination Address : &SPI1TXB
DMA1DSA = &SPI1TXB;
//DMODE unchanged; DSTP not cleared; SMR GPR; SMODE incremented; SSTP not cleared;
DMA1CON1 = 0x02;
//Source Message Size : 1
DMA1SSZ = 100;
//Destination Message Size : 1
DMA1DSZ = 1;
//Start Trigger : SIRQ None;
DMA1SIRQ = 0x15;
//Abort Trigger : AIRQ None;
DMA1AIRQ = 0x00;
// Clear Destination Count Interrupt Flag bit
PIR2bits.DMA1DCNTIF = 0;
// Clear Source Count Interrupt Flag bit
PIR2bits.DMA1SCNTIF = 0;
// Clear Abort Interrupt Flag bit
PIR2bits.DMA1AIF = 0;
// Clear Overrun Interrupt Flag bit
PIR2bits.DMA1ORIF =0;
PIE2bits.DMA1DCNTIE = 0;
PIE2bits.DMA1SCNTIE = 0;
PIE2bits.DMA1AIE = 0;
PIE2bits.DMA1ORIE = 0;
//EN enabled; SIRQEN disabled; DGO not in progress; AIRQEN disabled;
DMA1CON0 = 0x80;
}
При компиляции препроцессор выдаст сообщение
mcc_generated_files/dma1.c:62:13: warning: incompatible pointer to integer conversion assigning to 'volatile __uint24' (aka 'volatile unsigned __int24') from 'uint16_t (*)[100]' [-Wint-conversion]
DMA1SSA = &video_bufer;
^ ~~~~~~~~~~~~
mcc_generated_files/dma1.c:64:13: warning: incompatible pointer to integer conversion assigning to 'volatile unsigned short' from 'volatile unsigned char *' [-Wint-conversion]
DMA1DSA = &SPI1TXB;
Для этого рекомендую изменить строки
//Source Address : video_bufer
DMA1SSA = (uint24_t)&video_bufer;
//Destination Address : &SPI1TXB
DMA1DSA = (uint16_t)&SPI1TXB;
Более подробно про модуль DMA в PIC18 читаем в статье PIC18 – модуль DMA
Это может быть интересно
 LED модуль P10C4V12Views: 3324 LED панели на обычных регистрах типа 74HC595. Они выпускаются как монохромные так двух и полно цветные, особенность, что они предназначены для текстовой информации и имеют один уровень яркости. Общую яркость …
LED модуль P10C4V12Views: 3324 LED панели на обычных регистрах типа 74HC595. Они выпускаются как монохромные так двух и полно цветные, особенность, что они предназначены для текстовой информации и имеют один уровень яркости. Общую яркость … DIXELL XWEB500D-EVO + RUT900 или как пробить NAT-серверViews: 1210 Когда необходимо под какой нибудь контроллер имеющий вэб сервер в инет, то нужен статический IP, что оказалось проблемой при работе с операторами сотовых сетей, конкретно с оператором сети …
DIXELL XWEB500D-EVO + RUT900 или как пробить NAT-серверViews: 1210 Когда необходимо под какой нибудь контроллер имеющий вэб сервер в инет, то нужен статический IP, что оказалось проблемой при работе с операторами сотовых сетей, конкретно с оператором сети … Flight controller for FPV drone.Views: 57 Reverse engineering of a flight controller (SpeedyBee F405 V4 55A 30×30 Stack). Мене зацікавила конструкція основних компонентів FPV-дрона. Першим варіантом, який я розглянув, був контролер польоту від китайської …
Flight controller for FPV drone.Views: 57 Reverse engineering of a flight controller (SpeedyBee F405 V4 55A 30×30 Stack). Мене зацікавила конструкція основних компонентів FPV-дрона. Першим варіантом, який я розглянув, був контролер польоту від китайської … Audio-bluetooth modules F-6188 (BK8000L)Views: 2499Следующий модуль на чипе BK8000L. Заводское обозначение F-6188 также основным производителем не выпускается и отдан на тиражирование. с нижней стороны имеет маркировку В этом варианте мне попалась вроде полноценная …
Audio-bluetooth modules F-6188 (BK8000L)Views: 2499Следующий модуль на чипе BK8000L. Заводское обозначение F-6188 также основным производителем не выпускается и отдан на тиражирование. с нижней стороны имеет маркировку В этом варианте мне попалась вроде полноценная … CAN – Controller Area NetworkViews: 1264 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, …
CAN – Controller Area NetworkViews: 1264 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, …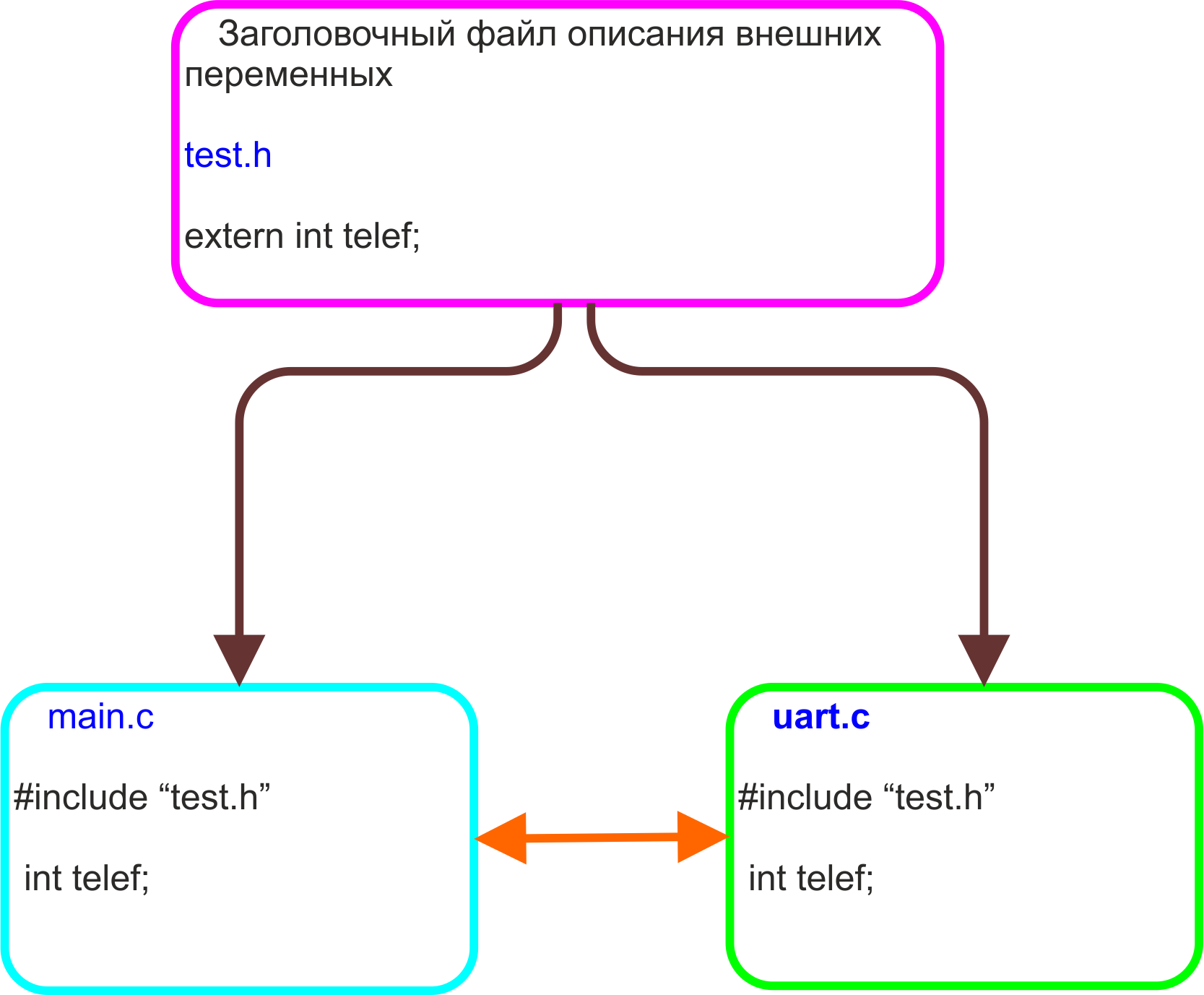 Просто о внешних переменныхViews: 950 Часто возникает задача когда необходимо предавать данные между модулями программы. Например, передать данные между файлами, или управлять работой модулей. Для этого создаем заголовочный файл и описываем наши переменные как …
Просто о внешних переменныхViews: 950 Часто возникает задача когда необходимо предавать данные между модулями программы. Например, передать данные между файлами, или управлять работой модулей. Для этого создаем заголовочный файл и описываем наши переменные как … Kitchen timer with contactless gesture controlViews: 817 Кухонний таймер з безконтактним керуванням жестами дозволяє встановити необхідний період часу для приготування страв, не торкаючись пристрою. Дуже зручно під час приготування їжі, коли руки забрудниться. Усі …
Kitchen timer with contactless gesture controlViews: 817 Кухонний таймер з безконтактним керуванням жестами дозволяє встановити необхідний період часу для приготування страв, не торкаючись пристрою. Дуже зручно під час приготування їжі, коли руки забрудниться. Усі … MCC PIC24 – модуль OUTPUT COMPARE – в режиме генератора звуковых сигналовViews: 856 При проектировании простых устройств автоматики, часто необходимо иметь механизм звукового оповещения. Самый верхний уровень, это формирование голосовых сообщений, но об этом, как то по позже… В самом примитивном …
MCC PIC24 – модуль OUTPUT COMPARE – в режиме генератора звуковых сигналовViews: 856 При проектировании простых устройств автоматики, часто необходимо иметь механизм звукового оповещения. Самый верхний уровень, это формирование голосовых сообщений, но об этом, как то по позже… В самом примитивном … MPLAB X IDE – управление проектамиViews: 1211 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора …
MPLAB X IDE – управление проектамиViews: 1211 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора … Обновление ESP8266 c ESPFlashDownloadTool_v3.6.3Views: 3744 Технология обновления следующая: Загружаем программу со страницы espressif.com. Разархивируем. Где находятся файлы, для прошивки? Заходим в каталоги Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка). Запускаем программу, …
Обновление ESP8266 c ESPFlashDownloadTool_v3.6.3Views: 3744 Технология обновления следующая: Загружаем программу со страницы espressif.com. Разархивируем. Где находятся файлы, для прошивки? Заходим в каталоги Подключаем по схеме в статье WiFi ESP8266 (замыкаем BT2, перемычка). Запускаем программу, …