Views: 1310
Во многих системах управления, для формирования управляющих сигналов требуется модуль ШИМ, он позволяет не только формировать импульсы заданной длительности, но и с применением обычного RC фильтра строить простые ЦАП.
MCC -позволяет быстро и легко настроить модули OC в PIC24 для работы с ШИМ.
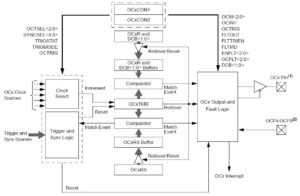
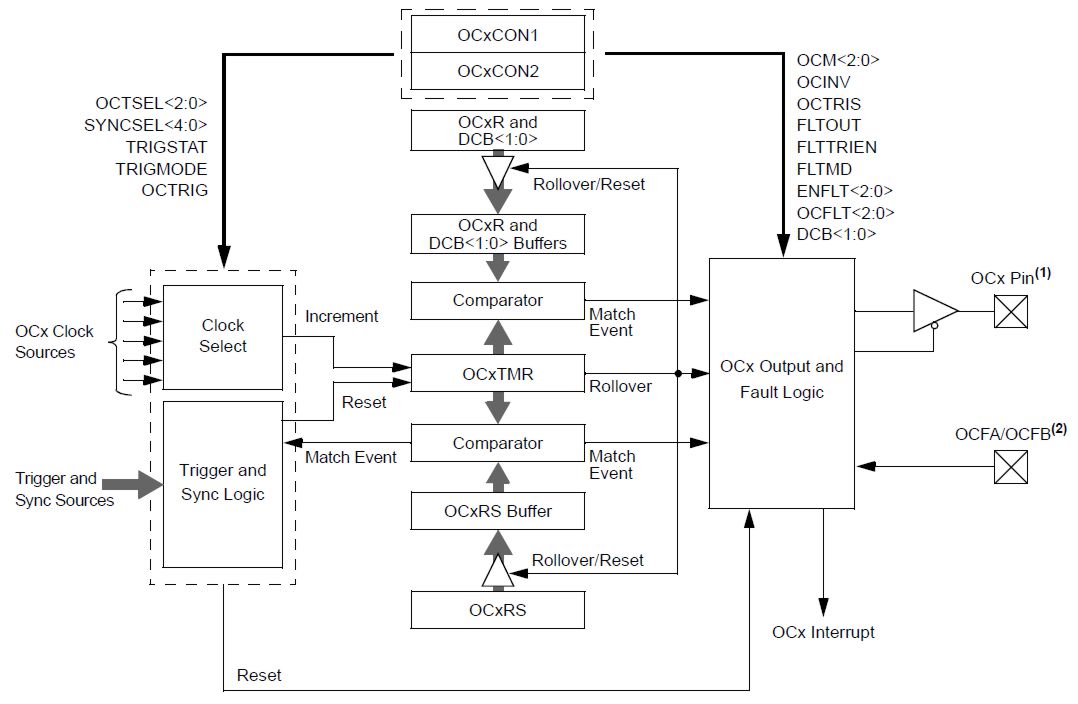
Структурная схема модуля в режиме ШИМ:
Процедура настройки модуля для работы в режиме ШИМ выглядит так:
1. Настройте выход модуля OCx на нужный порт.
2. Вычислите требуемые рабочие циклы период или частоту ШИМ.
3. Установить начальное значение длительности.
4. Настроить параметр источника синхронизации.
5. Включите прерывание, я если требуется, для модулей сравнения таймера и вывода. Для использования PWM Fault необходимо использовать прерывание на выходе.
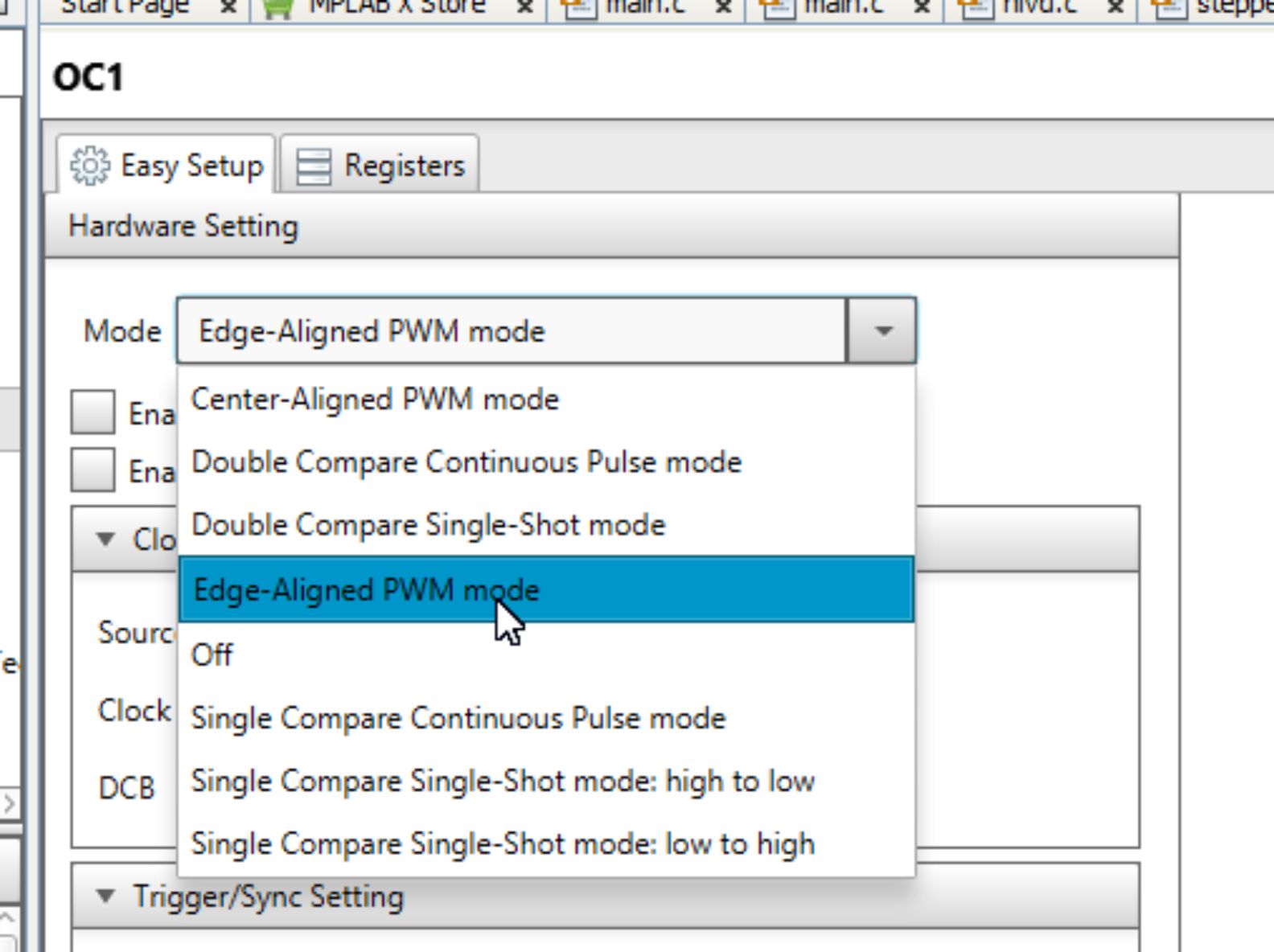
6. Выберите желаемый режим PWM в битах OCM <2: 0> (OCxCON1 <2: 0>).
7. Соответствующие входы Fault могут быть активированы с использованием битов ENFLT <2: 0>, как описано в OCxCON1.
8. Если в качестве источника тактового сигнала выбран таймер, настройте период работы таймера.
Примечание более подробно читайте в описании.
В MCC начинаем с добавления модуля в проект
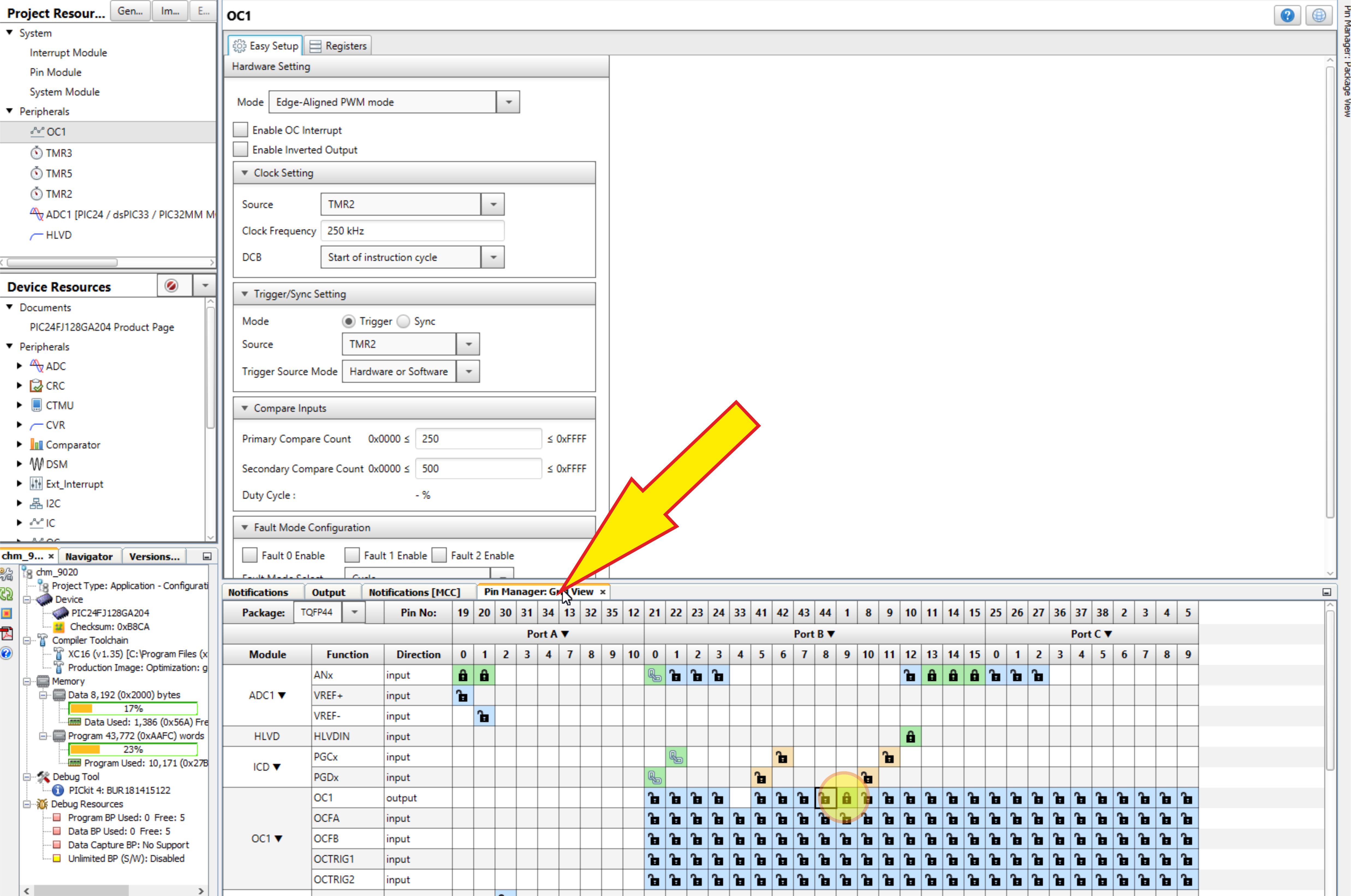
Откроем закладку менеджер выводов Pin Manager: Grid View. В этом окне настроим выход модуля на необходимый для нас вывод порта. В моем варианте это порт RB9/
В окне Ресурсы проекта Project Resources выберем Pin Module и убедимся в настройке порта
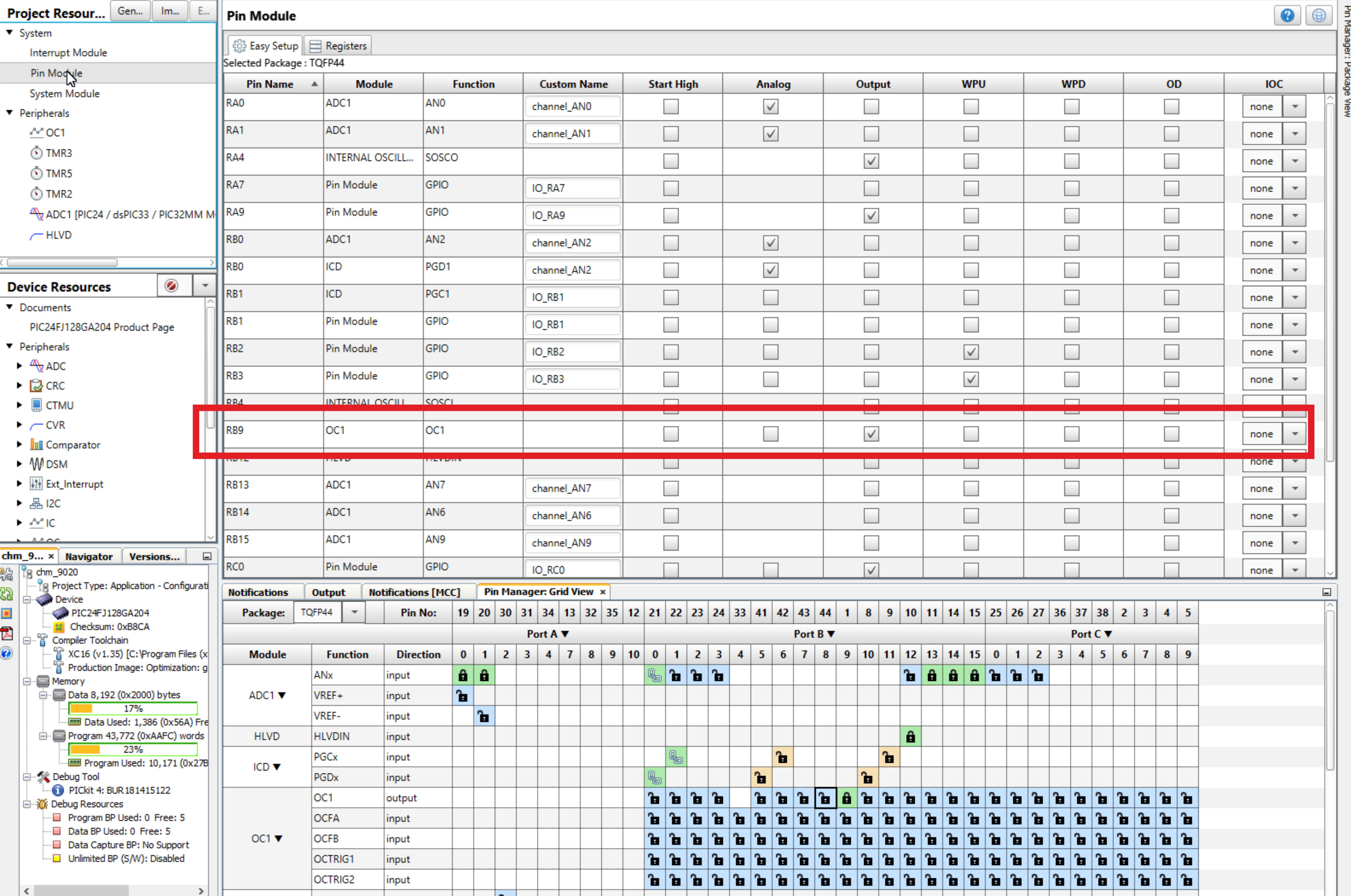
Выберем наш модуль (кликаем по надписи)

Перейдем к настройке модуля.
Выберем режим ШИМ.
Необходимо выбрать источник тактовых импульсов для модуля, тут большой выбор опишем пару вариантов. Выберем FOSC/2 это тактирование от тактового генератора.
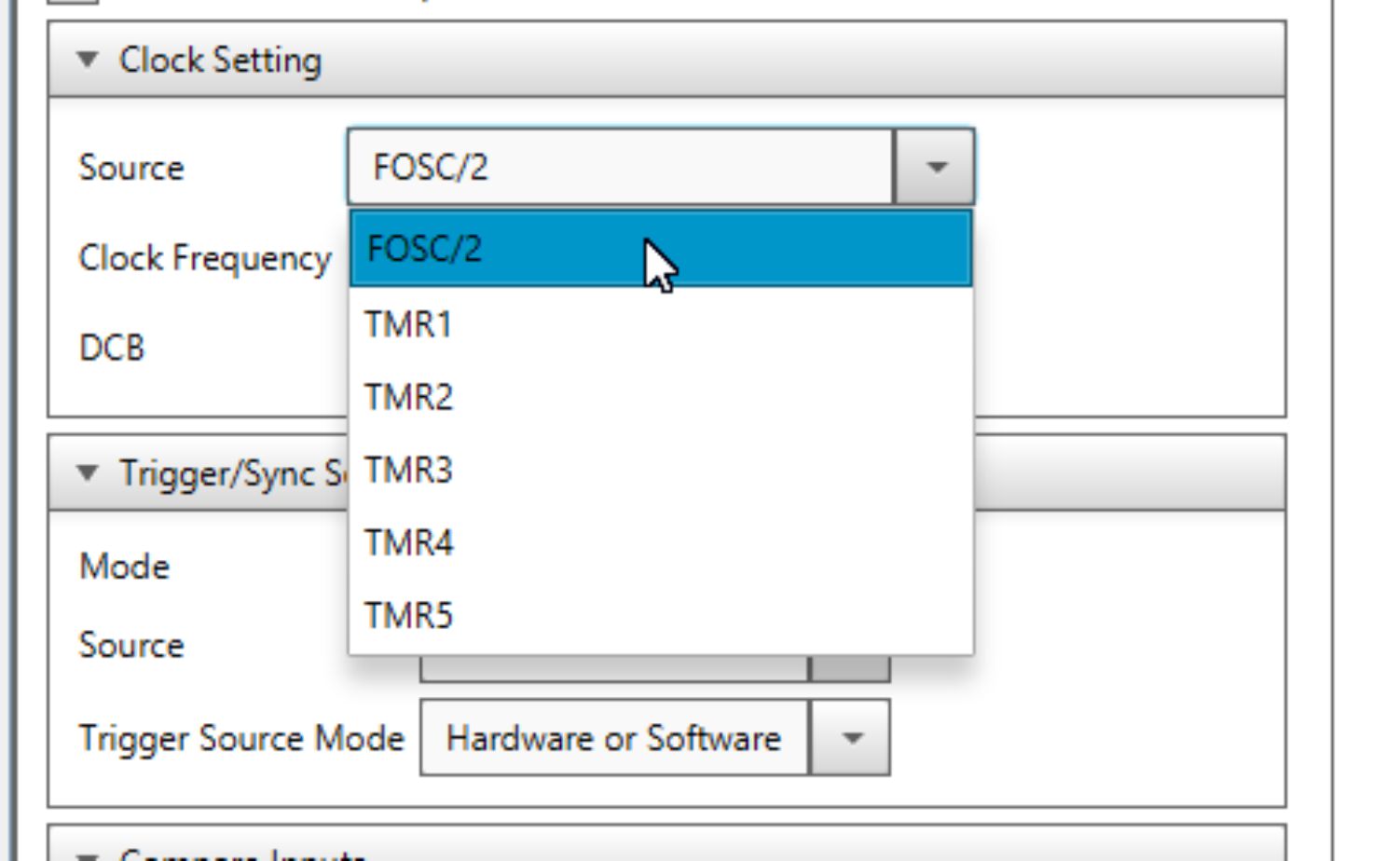
Если у нас тактовая 32 МГц, то на вход модуля будут поступать 16 МГц.
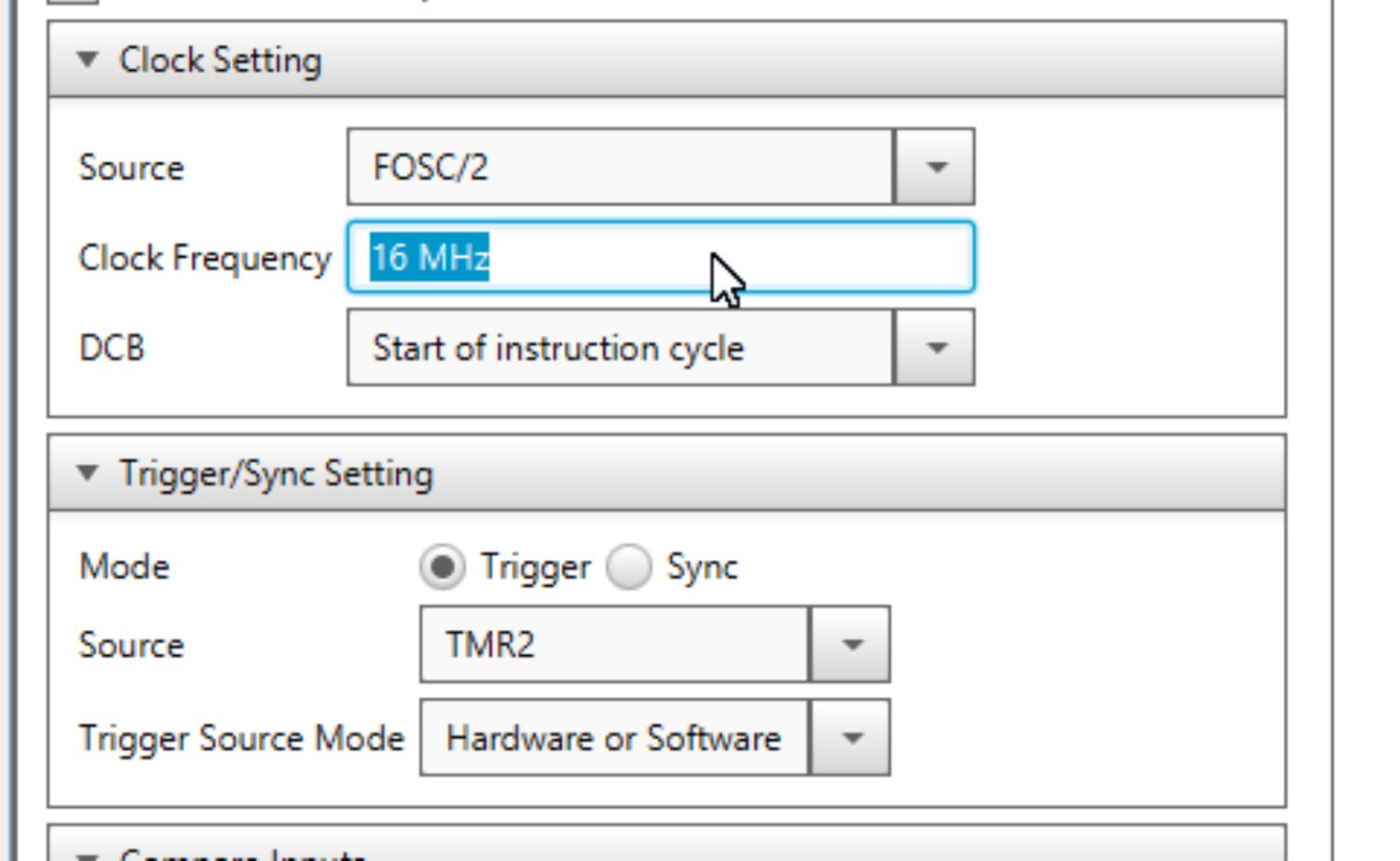
Параметр DCB оставим в варианте Start of instruction cycle.
Далее идут два важных параметра, это как будут запускаться работа ШИМ или как она будут синхронизироваться, а также параметр с какой выходной частотой будет работать ШИМ и его начальное значение.
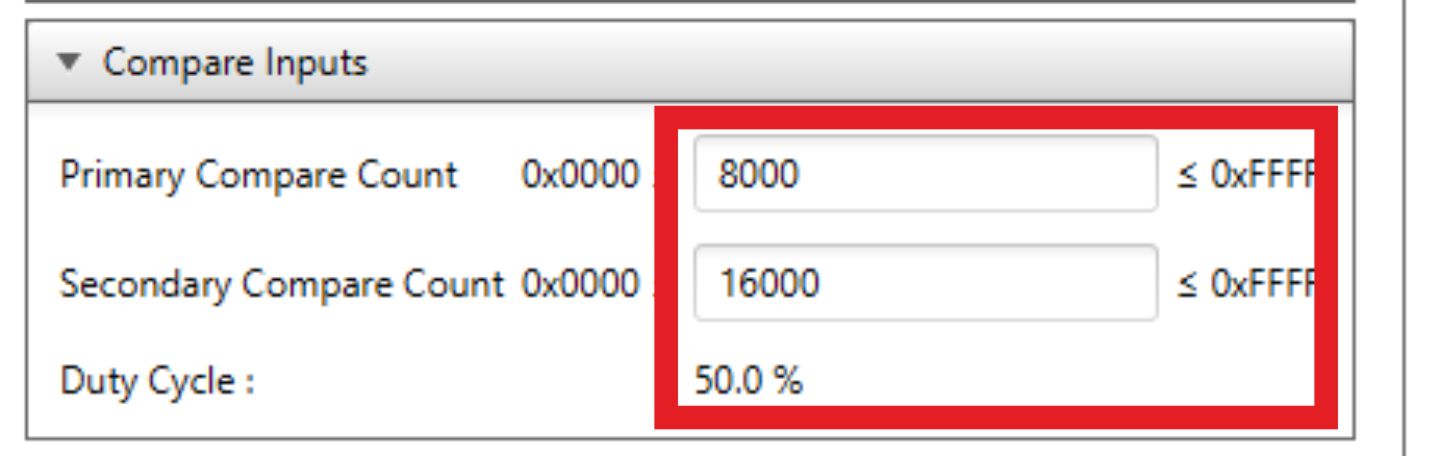
Для начала зададим рабочую частоту (длительность) и начальное значение ШИМ. Это необходимо сделать в этом окне
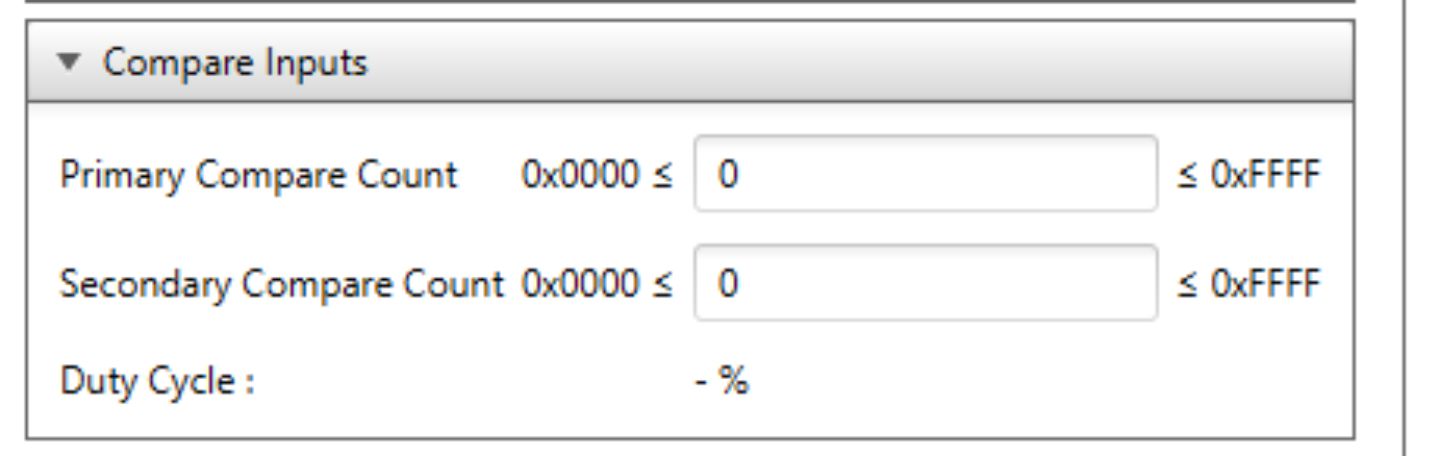
Параметр Secondary Compare Count задает рабочую частоту или период ШИМ. У нас тактовая 16 МГц например нам необходимо частота ШИМ 1000 Гц.
16 000 000 / 1000 = 16000
Промеряем 16000 < 0xFFFF (65535 это максимальное значение которое может иметь этот параметр) да меньше, значит, такая частота ШИМ возможна при такой тактовой частоте! Ok – подходит! Далее, чтобы получить например меандр, сделаем длительность импульса ШИМ 50%, это значит нашу
16000/2 = 8000
Заполним поля.
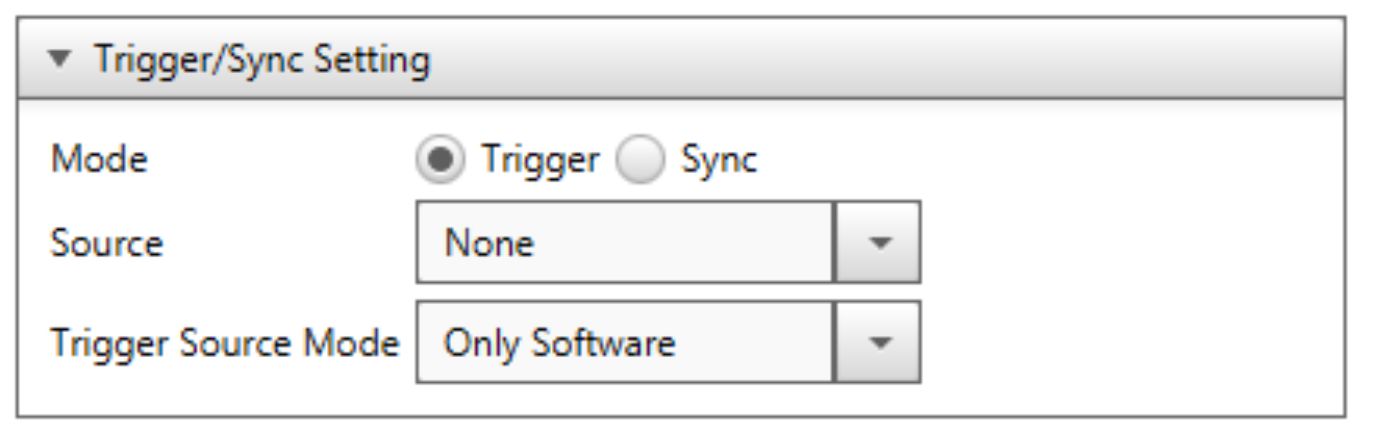
Далее настроим панель синхронизации
Выполним генерацию MCC? чтобы он переписал наши файлы и загрузим прошивку по микроконтроллер, проверим что реально получили в железе:
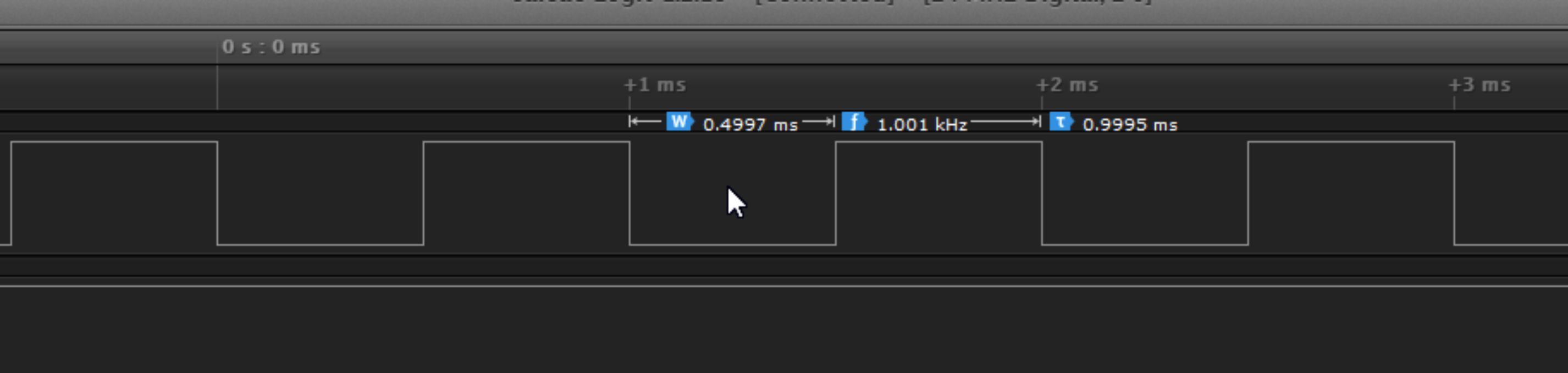
на выходе наша заданная 1 кГц, длительность положительного и отрицательного периода одинакова мы имеем меандр!!!
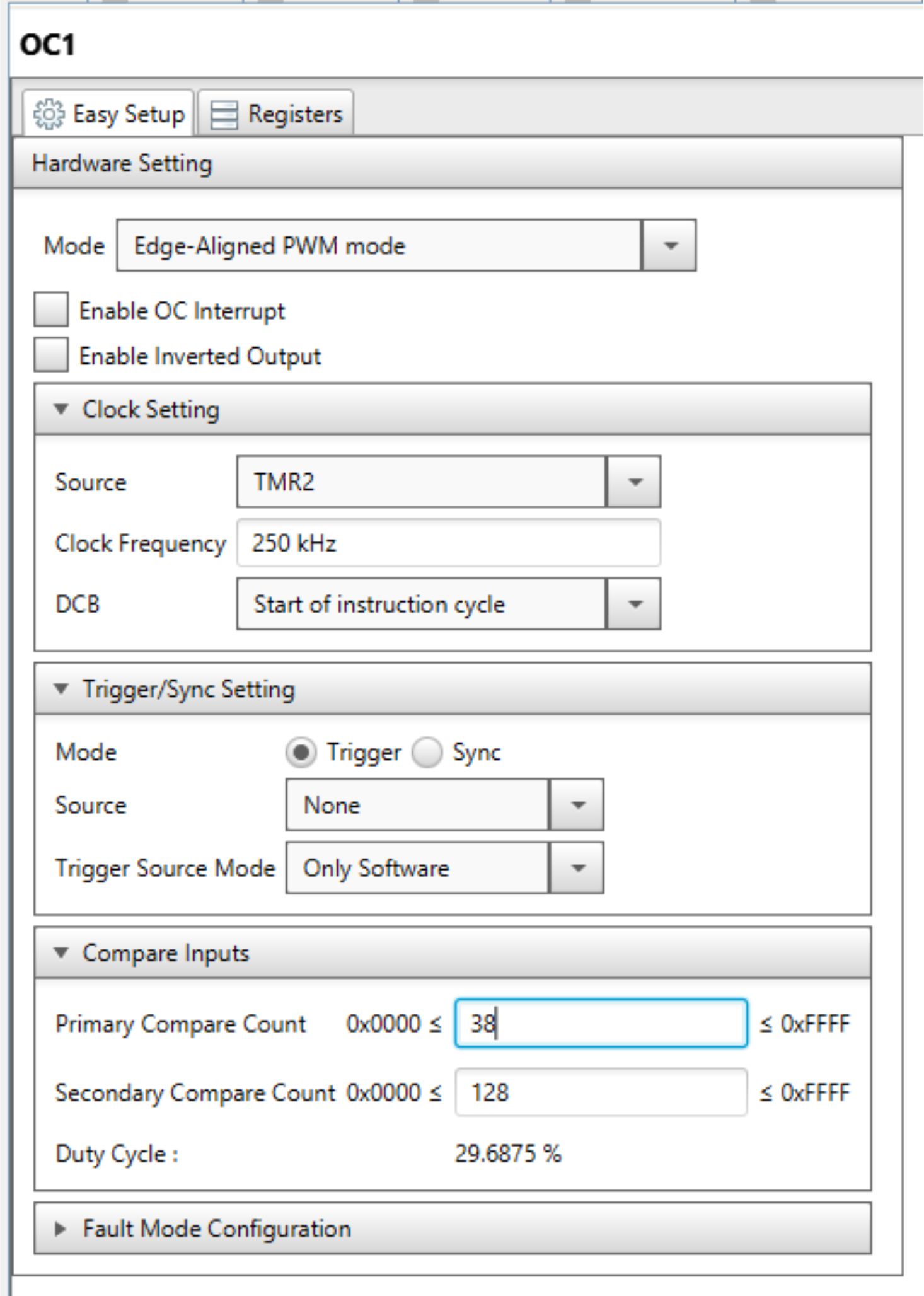
Еще один вариант настройки ШИМ, можно в качестве тактовых импульсивный выбрать таймер. Например, ТМR2. В этом варианте необходимо будет настроить и сам таймер, например, у меня об имеет период работы 250 кГц.

Для установки параметров, например, 2 кГц частота шим и начальный период 30% рассчитаем значения для регистров OC1R (длительность импульса) и OC1RS (период – частота ШИМ).
250 000 / 2000 = 125 (OC1RS )
125 * 0,3 =37,5 (OC1R = 38)
Выполним генерацию, загрузим прошивку в МК и проверим состояние ШИМ
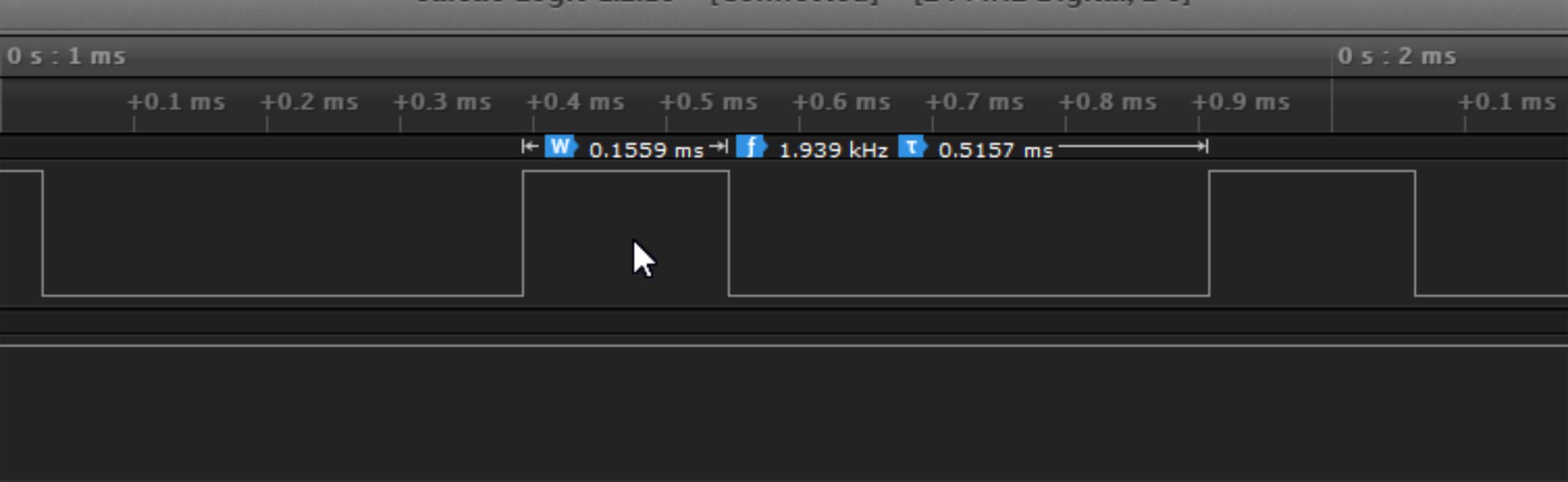

Частота 2 кГц, длительность импульса 30% все ок!
Осталось теперь понять как управлять в программе шириной импульса, Для этого нам MCC в файлах библиотеки oc1 функцию OC1_PrimaryValueSet:
void OC1_PrimaryValueSet( uint16_t priVal )
{
OC1R = priVal;
}
Которая позволяет записывать регистр OC1R или можно непосредственно выполнять запись в этот регистр.
Но это несколько не удобный метод, частенько проще формировать запись в ШИМ значения в процентах, например нам надо 50 процентов, просто пишем, 50 или надо 20% пишем 20, как это сделать? Я предлагаю использовать такой метод:
void PWM1 (uint8_t percent) //
{
uint32_t pwmu = percent;
pwmu = (pwmu*OC1RS)/100;
OC1R = (uint16_t)pwmu;
}
думаю, что выполняет функция достаточно просто, мы на основе значения в регистре периода вычисляем значение которое надо записать в регистр импульса, на основании аргумента в процентах (учтите, что значения процентов не должно превышать число 100!)
Вот так просто настроить OCх модуль в режиме ШИМ и управлять им!
Это может быть интересно
 Проект с использованием MCC часть 04Views: 1357 Теперь простого горения светиков нам не достаточно, заставим их мигать. Для начала используем первобытно простой способ, но достаточно простой. Используем функции delay, напрягаться откуда они берутся не будем, самое …
Проект с использованием MCC часть 04Views: 1357 Теперь простого горения светиков нам не достаточно, заставим их мигать. Для начала используем первобытно простой способ, но достаточно простой. Используем функции delay, напрягаться откуда они берутся не будем, самое … Часы + Календарь + Термометр + …Views: 2835 Часы + Календарь + Термометр + Индикатор влажности + Секундомер + Дистанционное управление на ИК лучах (пульты на RC-5 протоколе) + Автоматическая регулировка яркости + Возможность вывода данных через USB, …
Часы + Календарь + Термометр + …Views: 2835 Часы + Календарь + Термометр + Индикатор влажности + Секундомер + Дистанционное управление на ИК лучах (пульты на RC-5 протоколе) + Автоматическая регулировка яркости + Возможность вывода данных через USB, … Проект с использованием MCC часть 01Views: 2733 Для изучения MCC я выбрал простой контроллер PIC16F1509. Выбор его был обусловлен богатой новой периферией которую можно изучить. Для начала была собрана схема на макетной плате Внешний вид …
Проект с использованием MCC часть 01Views: 2733 Для изучения MCC я выбрал простой контроллер PIC16F1509. Выбор его был обусловлен богатой новой периферией которую можно изучить. Для начала была собрана схема на макетной плате Внешний вид … USB K-L-line адаптерViews: 4775 USB K-L-line адаптер предназначен для связи персонального компьютера с диагностической шиной автомобиля – интерфейс ISO-9141. Этот проект предназначен для сборки недорого устройства с использованием специально для этой цели …
USB K-L-line адаптерViews: 4775 USB K-L-line адаптер предназначен для связи персонального компьютера с диагностической шиной автомобиля – интерфейс ISO-9141. Этот проект предназначен для сборки недорого устройства с использованием специально для этой цели … Простой цифровой милливольтметр постоянного токаViews: 4230 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля …
Простой цифровой милливольтметр постоянного токаViews: 4230 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля … Temperature measurement with NTC thermistor.Views: 747 Проекты в которых присутствовало измерение температуры начинал с цифровых датчиков, т.к. в них все просто и не надо ничего преобразовывать и вычислять. При использовании цифровых датчиков ты получаешь …
Temperature measurement with NTC thermistor.Views: 747 Проекты в которых присутствовало измерение температуры начинал с цифровых датчиков, т.к. в них все просто и не надо ничего преобразовывать и вычислять. При использовании цифровых датчиков ты получаешь … Ссылки на интересные источникиViews: 993 Сбор 3D моделей от André L’Hérault конденсаторы, резисторы, индуктивности dropbox IPC-SM-782 Surface Mount Design and Land Pattern Standard Видео уроки по Altium designer Alexey Sabunin https://www.youtube.com/channel/UCG7N5CqXpyK8nQjr1EmMgng Сергей Булавинов https://www.youtube.com/channel/UCISAMXRnN_Qw9UTjUwZI1Jw Robert Feranec https://www.youtube.com/user/matarofe …
Ссылки на интересные источникиViews: 993 Сбор 3D моделей от André L’Hérault конденсаторы, резисторы, индуктивности dropbox IPC-SM-782 Surface Mount Design and Land Pattern Standard Видео уроки по Altium designer Alexey Sabunin https://www.youtube.com/channel/UCG7N5CqXpyK8nQjr1EmMgng Сергей Булавинов https://www.youtube.com/channel/UCISAMXRnN_Qw9UTjUwZI1Jw Robert Feranec https://www.youtube.com/user/matarofe … Просто о структурах и объединениях в СиViews: 2391 Какие задачи нам позволяют решать структуры и объединения? Для разработчика встроенных систем эффективность и компактность кода всегда на первом месте. Если программировании на Ассемблере ты сам определяешь как …
Просто о структурах и объединениях в СиViews: 2391 Какие задачи нам позволяют решать структуры и объединения? Для разработчика встроенных систем эффективность и компактность кода всегда на первом месте. Если программировании на Ассемблере ты сам определяешь как … MCC – K42 – настройка модуля DMAViews: 1030 MCC – в версии v.3.95.0 и начиная ядра 4.85.0 конфигуратор предоставляет графический интерфейс для настройки модуля DMA. Для начала: Посмотреть какая версия МСС можно в закладке версии, если …
MCC – K42 – настройка модуля DMAViews: 1030 MCC – в версии v.3.95.0 и начиная ядра 4.85.0 конфигуратор предоставляет графический интерфейс для настройки модуля DMA. Для начала: Посмотреть какая версия МСС можно в закладке версии, если … УКВ – радиоприем, часть 2Views: 6445 Пришло свободное время решил вторую часть проекта реализовать (правда есть мысль и третью с использование цветного OLED и функцией ch-светомузыки, но это только задумка… Для понимания функций интегрального …
УКВ – радиоприем, часть 2Views: 6445 Пришло свободное время решил вторую часть проекта реализовать (правда есть мысль и третью с использование цветного OLED и функцией ch-светомузыки, но это только задумка… Для понимания функций интегрального …