
Views: 2538

Первое, что надо понять назначение кнопок клавиш пульта, а также, что за кодирование реализовано в ИК- пульте. Для назначения клавиш обратимся к описанию, а для взлома кодирования воспользуемся старым и добрым Saleae Logic.Для тех кто связан модернизацией и управлением ресиверов Trimax часто возникают вопросы по синтезу или декодированию команд инфракрасного пульта, а так-же создания устройств по управлению ресиверами по одно проводной шине. В этой статье приведен пример создания как приемника так и передатчика, а также управление TV-тюнером на PIC-микроконтроллере.

Назначение кнопок пульта
| Клавиша | Основное назначение | Код ИК последовательности |
 |
Включение – Выключение | 10000000101111110011101111000100 |
 |
Режим MUTE | 10000000101111110011100111000110 |
 |
Выбор номера канала непосредственным вводом | 10000000101111110100100110110110 |
| *** | ||
 |
10000000101111110010001111011100 | |
 |
Переключение с приема телевидения на прием радиостанций | 10000000101111111001101101100100 |
 |
Возврат на предыдущий канал | 10000000101111110100000110111110 |
 |
Отображение меню управления на экране | 10000000101111111010100101010110 |
 |
Возврат в предыдущее меню или выход из меню управления | 10000000101111111010001101011100 |
 |
Переход до следующей программы или меню управления | 10000000101111110100101110110100 |
 |
Переход до предыдущей программы или меню управления | 10000000101111110100101110110100 |
 |
Регулировка громкости уменьшение или переход по меню влево | 10000000101111111001100101100110 |
 |
Регулировка громкости увеличение или переход по меню вправо | 10000000101111111000001101111100 |
 |
Вызов списка программ или активация выбранного пункта меню | 10000000101111110111001110001100 |
 |
Вызов функции программного гида | 10000000101111110101101110100100 |
 |
Информация о выбранном канале | 10000000101111110001000111101110 |
 |
Отображение окна поиска | 10000000101111110110100110010110 |
 |
Переход в режим теле текста | 10000000101111110100001110111100 |
 |
Управление субтитрами | 10000000101111111100001100111100 |
 |
Отображение окна ЗВУК | 10000000101111110010000111011110 |
 |
Перелистывать список вверх | 10000000101111111011101101000100 |
 |
Перелистывать список вниз | 10000000101111110011000111001110 |
 |
Отображение списка избранных групп | 10000000101111110110101110010100 |
 |
Перемотка назад | 10000000101111111100000100111110 |
 |
Перемотка в перед | 10000000101111111110001100011100 |
 |
Нет функций | 10000000101111111010000001011111 |
 |
Пауза/воспроизведение | 10000000101111110100000010111000 |
 |
Остановить воспроизведение | 10000000101111111100000000111111 |
Более подробно можно ознакомиться с функциями пульта по описанию на модель TR-2012HD [wpdm_file id=310 template=”link-template-calltoaction3.php”]
Последовательности формируемые ИК-пультом.

Последовательность передачи команд управления классическая. Она команда за которой передаются комода авто повтора. Сама команда начинается со стандартной преамбулы, за которой следует 32 бита данных (4 байта данных). Заканчивается стробом.
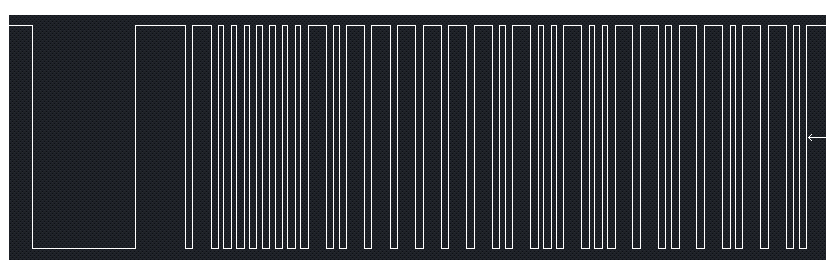
Декодирование ИК-команд
Кодирование бит широтное (сканы кодов представлены с выхода ИК приемника). Параметры длительностей для формирования данных сведены в таблицу, синхронизация для декодирования берется от отрицательного фронта.
| Для команды | |
| Назначение бита | Длительность |
| Преамбула | 13.409 ms |
| Длительность бита 0 | 1.120 ms |
| Длительность бита 1 | 2.232 ms |
| Для авто повтора | |
| Преамбула | 11.174 ms |
Частота модуляции несущей 38 кГц (но можно использовать и 36 если приемник другого типа).
Для декодирования можно использовать CCP модуль в режиме захвата. Настройка (для 16 серии PIc-контроллеров)
// настройка CCP4 в режиме захвата
T1CON=0b00110001; // настройка таймера T1CON
// |||||| |
// |||||| +-- TMR1ON таймер включить
// |||||+---- T1SYNC синхронизация отключена
// ||||+----- T1OSCEN генератор отключен
// ||++------ T1CKPS настройка предделителя 11 = 1:8 Prescale value
// ++-------- TMR1CS выбор тактовой частоты FOSC
CCP4CON=0b00000100; // вход RB0
// ++++-- CCPxM<3:0>: режим работы - Capture mode: every falling edge
Данные будут поступать на вход модуля CCP4, это RB0 в контроллерах типа PIC16F1936. Переменную для приема байт можно выбрать 8-16-32 бита. Если вы выберите unsigned long bait01;, то получите данные о полной команде, если меньше то соответственно только младшие байты. Для многих приложений достаточно 16 байт.
Сама функция декодирования происходит через прерывание от CCP модуля
if(CCP4IF)// ИК приемник
{
CCP4IF=0; // сброс вектора прерывания.
pwm_reg=TMR1L;
pwm_reg += TMR1H << 8;
TMR1L=0;
TMR1H=0;
if(pwm_reg>13000&&pwm_reg<14000)// передача синхроимпульса должна сопровождаться переполнением таймера
{
chetchic=CLOBIT;//счетчик бит (3 байта 8*3=24)
}
else
if (pwm_reg>11000&&pwm_reg<12000&&POV)// передача "бита автоповтора"
{ // POV - блокировка функции автоповтора если не было перед этим передачи команды
AUTO=1;
timerautopo=5;// инициализация таймера, блокировки автоповтора
}
else
if (pwm_reg>2000&&pwm_reg<2500&&chetchic>0) // передача "1"
{
bait01<<=1;
bait01 |= 1;
chetchic--;//подсчет принятых бит
if(!chetchic){PRIEM=1;POV=1;}// 32 установить флаг команда принята если переданы все 32 бита
}
else
if (pwm_reg>1000&&pwm_reg<1200&&chetchic>0)// передача "0"
{
bait01<<=1;
chetchic--;//подсчет принятых бит
if(!chetchic){PRIEM=1;POV=1;}// установить флаг команда принята если переданы все 32 бита
}
}
Как работает само декодирование, мы настраиваем прерывание по отрицательному фронту сигнала. После появления этого события, мы считываем значение таймера и сразу его обнуляем. На этом, все декодирование и закончено, по большому счету. Далее просто у нас есть 4 типа длительностей, это преамбула для передачи данных, преамбула для автоповтора, и длительность передачи нуля и единицы. Нам необходимо только сравнивать эти длительности и при определении, что приняли ноль или единицу записывать его в переменную, которая выступает буфером приема. После принятия 32 бит сформировать флаг – данные готовы.
Более подробно можно ознакомится скачав проект по декодированию кодов пульта Trimax.
Коды IR- пульта для автомобильных магнитол. Длительность команды 32 бита.
| Клавиша | >Функция | Код (десятичный) | Примечание |
| ВКЛ/ВЫКЛ | 501 43455 | ||
| Квадрат | 501 39885 | ||
| В конец | 501 60285 | ||
| MODE | Режим | 501 80175 | |
| BAND | Диапазон | 501 88845 | |
| Стрелка вверх | 501 90375 | ||
| TITLE | 501 66405 | ||
| SUB-T | 501 39375 | ||
| Стрелка влево | 501 52125 | ||
| ENTER | 501 84765 | ||
| Стрелка вправо | 501 96495 | ||
| SETAP | 501 65895 | ||
| PBC | 501 82215 | ||
| Стрелка вниз | 501 49575 | ||
| ANGLE | 501 41415 | ||
| SLOW | 501 78135 | ||
| 1 | 501 61815 | ||
| 2 | 501 94455 | ||
| 3 | 501 43655 | ||
| 4 | 501 56205 | ||
| 5 | 501 55695 | ||
| 6 | 501 69975 | ||
| 7 | 501 76095 | ||
| 8 | 501 76605 | ||
| 9 | 501 47535 | ||
| 0 | 501 88335 | ||
| 10+ | 501 97005 | ||
| GOTO | 501 51615 | ||
| APS | 501 72525 | ||
| ST | 501 67935 | ||
| VOL+ | 501 99045 | ||
| ZOOM | 501 82725 | ||
| LOC | 501 78645 | ||
| SEEK- | 501 57735 | ||
| SEL | 501 48045 | ||
| SEEK+ | 501 72015 | ||
| MUTE | 501 62325 | ||
| CLK | 501 94965 | ||
| VOL- | 501 80685 | ||
| AUDIO | 501 43965 | ||
Эмуляция передатчика ИК-команд.
Передача это обратный процесс декодирования.
Для передачи необходимо также использовать модуль CCP в режиме ШИМ. Его назначение формирование несущей для ИК сигнала. В зависимости от используемого приемника необходимо выбирать 36 или 38 кГц. Хотя из практики приемники на 36 кГц нормально работают на умеренные расстояния и 38 кГц несущей. Но если необходимо уверенный прием или дальность то рекомендую использовать несущую которую использует преемник. Если корректно выбрано несущая, то при 25% наполненности несущей и согласовании приемника можно уверенно покрывать расстояния до 60 метров.
обновлено 2014-07-22
Продолжение следует…
Это может быть интересно
 BMP280 – температура и атмосферное давление – учебный проектViews: 2303 Учебный проект на PIC32 и светодиодной панели P5 (2121)-168-6432-80 (32*64). Проект позволяет ознакомиться с простой графикой и с чтением давления и температуры с датчика BMP280. Для тестирования необходимо …
BMP280 – температура и атмосферное давление – учебный проектViews: 2303 Учебный проект на PIC32 и светодиодной панели P5 (2121)-168-6432-80 (32*64). Проект позволяет ознакомиться с простой графикой и с чтением давления и температуры с датчика BMP280. Для тестирования необходимо … Game, exercise machine – Logic Gates.Views: 45 Game, exercise machine – Logic Gates. A game, a simulator, a gift – the development of logical thinking. The game is designed to develop logical thinking in children, …
Game, exercise machine – Logic Gates.Views: 45 Game, exercise machine – Logic Gates. A game, a simulator, a gift – the development of logical thinking. The game is designed to develop logical thinking in children, … ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 6276 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. …
ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 6276 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. … Altium Designer my setup system and project structureViews: 1096 Используйте только последнее обновление!!! Updates https://catcatcat.d-lan.dp.ua/altium-designer-my-libraries-project-templates-system-settings-by-catcatcat-v23-09/ Тут хочу поделиться как я настраиваю Altium Designer и как я использую файлы DXPPreferences.DXPPrf для быстрой конфигурации и получения …
Altium Designer my setup system and project structureViews: 1096 Используйте только последнее обновление!!! Updates https://catcatcat.d-lan.dp.ua/altium-designer-my-libraries-project-templates-system-settings-by-catcatcat-v23-09/ Тут хочу поделиться как я настраиваю Altium Designer и как я использую файлы DXPPreferences.DXPPrf для быстрой конфигурации и получения … ch-4050 – дифференциальный терморегуляторViews: 2088 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя …
ch-4050 – дифференциальный терморегуляторViews: 2088 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя … Гаджеты для домашней автоматики – Емкостной сенсорViews: 1832 Управление светодиодным освещением – Сенсор емкостной. Данный гаджет предназначен для управления освещением где необходимо включением освещение сенсорным прикосновением. Датчик позволяет управлять светодиодной нагрузкой в виде модулей или светодиодных лент …
Гаджеты для домашней автоматики – Емкостной сенсорViews: 1832 Управление светодиодным освещением – Сенсор емкостной. Данный гаджет предназначен для управления освещением где необходимо включением освещение сенсорным прикосновением. Датчик позволяет управлять светодиодной нагрузкой в виде модулей или светодиодных лент … MPLAB® Harmony – или как это просто! Часть 1.Views: 3932 Часть первая – Установка Гармонии. Музыкальная тема к статье, слушаем: В начале запуска нового проекта и выбора микроконтроллера стоит задача правильно его сконфигурировать, прежде чем перейти к реализации …
MPLAB® Harmony – или как это просто! Часть 1.Views: 3932 Часть первая – Установка Гармонии. Музыкальная тема к статье, слушаем: В начале запуска нового проекта и выбора микроконтроллера стоит задача правильно его сконфигурировать, прежде чем перейти к реализации … ch-светомузыка и AK4113Views: 1532 Пришло время вернуться к светомузыке. На сегодня использование аналогового входа стало непрактичным, на сегодня необходимо использовать S/PDIF и Toslink. С этим надо было как то разобрать, что это …
ch-светомузыка и AK4113Views: 1532 Пришло время вернуться к светомузыке. На сегодня использование аналогового входа стало непрактичным, на сегодня необходимо использовать S/PDIF и Toslink. С этим надо было как то разобрать, что это … Arduino LCD + STONE STVI056WT-01 + Strain gaugeViews: 712 Author li grey email: greyli1987@outlook.com The strain assessment instrument is used to assess the degree of corresponding muscle strain by obtaining the muscle surface action potential through silver …
Arduino LCD + STONE STVI056WT-01 + Strain gaugeViews: 712 Author li grey email: greyli1987@outlook.com The strain assessment instrument is used to assess the degree of corresponding muscle strain by obtaining the muscle surface action potential through silver … AD9833 – Programmable Waveform Generator – part twoViews: 1979 Прошло время и появилась тема, что-бы закончить проект AD9833 – Programmable Waveform Generator. Приехали печатные платы. В этот раз я печатные платы заказывал в https://jlcpcb.com/ делал это в …
AD9833 – Programmable Waveform Generator – part twoViews: 1979 Прошло время и появилась тема, что-бы закончить проект AD9833 – Programmable Waveform Generator. Приехали печатные платы. В этот раз я печатные платы заказывал в https://jlcpcb.com/ делал это в …