Views: 805
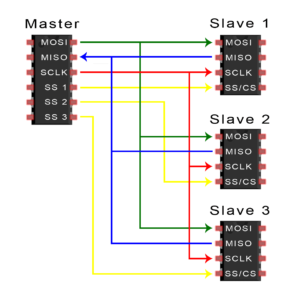
В PIC32MX795F512H доступно 3 SPI это SPI2, SPI3, SPI4.
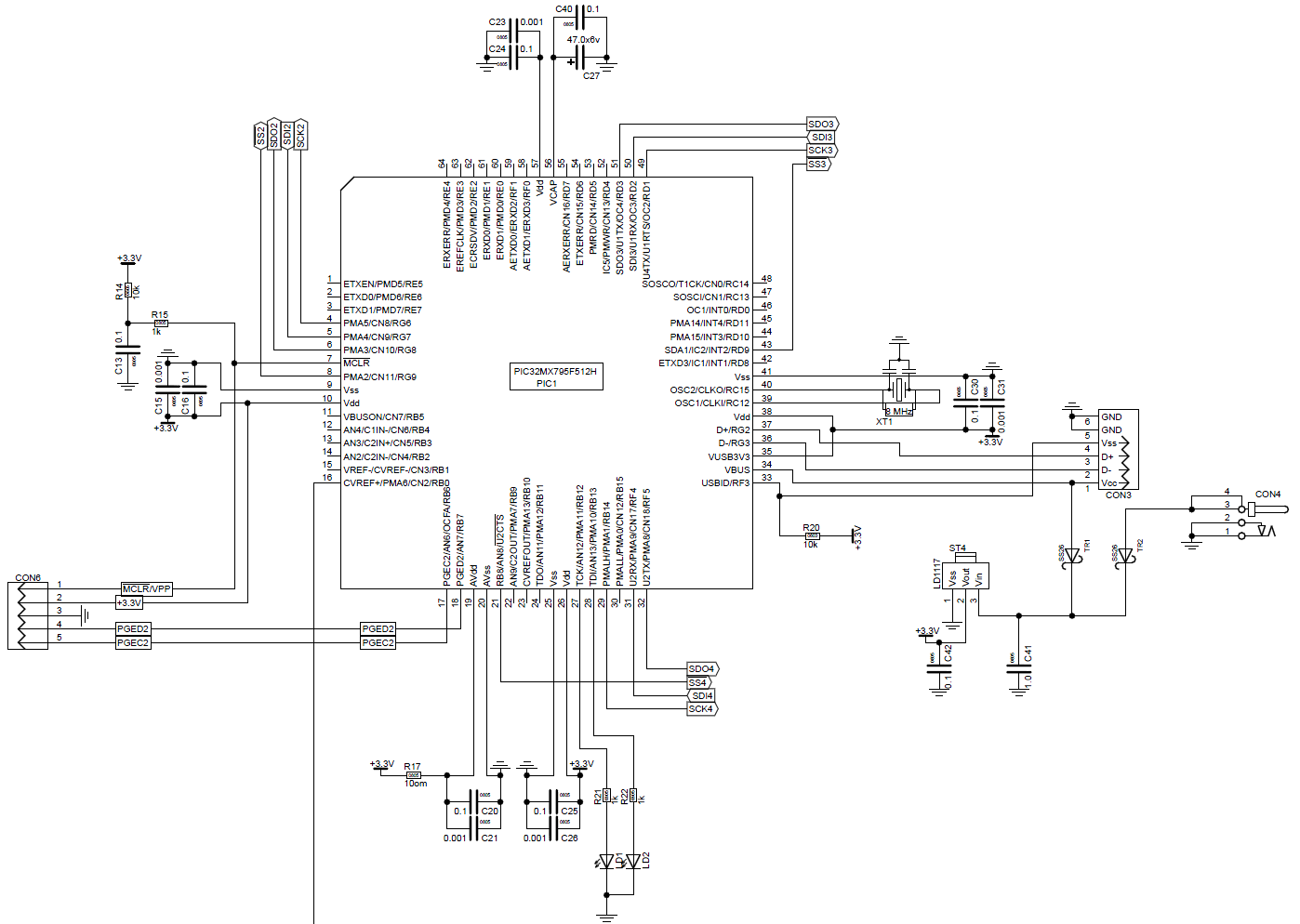 схема в PDF
схема в PDF
Настройка SPI модуля сводиться к следующим параметрам, например, для SPI2 для работы со светодиодами APA102, в этом варианте нам требуются только две линии линия данных и линия синхронизации.
Выключим модуль (если он был включен)
// SPI2CON=0; // выключить SPI //
Выберем тип буфера, 0 – обычный или 1-расширенный, в расширенном режиме в зависимости от того какой раз мер данных мы получаем разную глубину FIFO. Если размер данных 8 бит, то получаем 16 буферов, приема передачи в отделенности, 16 бит – 8 байт, если 32 бит – 4 байта в каждом буфере.
// SPI2CONbits.ENHBUF=1; // Расширенный буфер //
Настраиваем длину данных, в нашем случае 8 бит
// SPI2CONbits.MODE32=0; // 0 - 8-bit - 16 буферов //
Задаем режим работы модуля
// SPI2CONbits.MSTEN=1; // 1 = Master mode //
Задаем параметры шины синхронизации
// SPI2CONbits.CKP=1; // пассивный уровень шины CLOCK высокий SPI2CONbits.CKE=0; // данные передаются от активного к пассивному уровню пассивного к активному уровню //
Задаем тактовую частоту шины
// SPI2BRG = 15; // 2,5MHz для 80 MHz //
Включаем модуль в работу
// SPI2CONbits.ON=1; // Включить модуль //
В общем виде
// настройка SPI
SPI2CON=0; // выключить SPI
SPI2CONbits.ENHBUF=1; // Расширенный буфер
SPI2CONbits.MODE32=0; // 0 - 8-bit - 16 буферов
SPI2CONbits.MSTEN=1; // 1 = Master mode
SPI2CONbits.CKP=1; // пассивный уровень шины CLOCK высокий
SPI2CONbits.CKE=0; // данные передаются от активного к пассивному уровню пассивного к активному уровню
SPI2BRG = 15; // 2,5MHz для 80 MHz
SPI2CONbits.ON=1; // Включить модуль
//
Если необходимо работать с прерывания можно настроить
//
SPI2CONbits.STXISEL=0b00; //
IFS1bits.SPI2TXIF = 0; // сбросить флаг прерывания TX
IEC1bits.SPI2TXIE = 1; // разрешить прерывания от TX
IPC7bits.SPI2IP = 3; // приоритет 3
IPC7bits.SPI2IS = 0; // субприоритет уровень 0
//
Это может быть интересно
 Система AT команд версии V2.0 для ESP8266 и ESP32Views: 13869 Появление нового модуля на базе ESP32 заставило систематизировать систему AT команд, а так же систему обновления и для модулей на базе ESP8266. Начиная с версии v2.0 в ESP8266 …
Система AT команд версии V2.0 для ESP8266 и ESP32Views: 13869 Появление нового модуля на базе ESP32 заставило систематизировать систему AT команд, а так же систему обновления и для модулей на базе ESP8266. Начиная с версии v2.0 в ESP8266 … LED драйвер TM1639Views: 2495 TМ1639 позволяет работать на матрицу 8*8 или 8 семисегметных индикаторов. Может работать как на индикаторы с общим катодом, но и есть возможность подключать общим анодом. Для управления драйвером …
LED драйвер TM1639Views: 2495 TМ1639 позволяет работать на матрицу 8*8 или 8 семисегметных индикаторов. Может работать как на индикаторы с общим катодом, но и есть возможность подключать общим анодом. Для управления драйвером … Универсальный терморегулятор ch-c3000Views: 3239 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в …
Универсальный терморегулятор ch-c3000Views: 3239 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в … Дисплей KD035C-3A подключение и управлениеViews: 898 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение …
Дисплей KD035C-3A подключение и управлениеViews: 898 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение … Проект с использованием MCC часть 12-2Views: 1239 Настало время для изучения шины I2C. Изучать будем на примере работы с индикатором RET012864E. Что изменили со старой схемы: В прошлой теме я затупил и не добавил подтягивающие резисторы …
Проект с использованием MCC часть 12-2Views: 1239 Настало время для изучения шины I2C. Изучать будем на примере работы с индикатором RET012864E. Что изменили со старой схемы: В прошлой теме я затупил и не добавил подтягивающие резисторы … Акриловый корпус для платы ch-4000Views: 875 Плата ch-4000 подходит для монтажа в корпуса на дин рейку, но для домашней автоматики необходимо что-то другое, поэтому был разработан корпус из акрила который позволит создавать настольные и настенные устройства. Корпус …
Акриловый корпус для платы ch-4000Views: 875 Плата ch-4000 подходит для монтажа в корпуса на дин рейку, но для домашней автоматики необходимо что-то другое, поэтому был разработан корпус из акрила который позволит создавать настольные и настенные устройства. Корпус … ESP32-первое знакомствоViews: 7324 Музыкальная тема к статье, слушаем: Настало время познакомиться c ESP32 и для меня, для этого я приобрел в ГАММЕ отладочную плату с модулем ESP-WROOM-32 (ESP32-DevKitC). Первая задача, как …
ESP32-первое знакомствоViews: 7324 Музыкальная тема к статье, слушаем: Настало время познакомиться c ESP32 и для меня, для этого я приобрел в ГАММЕ отладочную плату с модулем ESP-WROOM-32 (ESP32-DevKitC). Первая задача, как … Гаджеты для домашней автоматики – Емкостной сенсорViews: 1834 Управление светодиодным освещением – Сенсор емкостной. Данный гаджет предназначен для управления освещением где необходимо включением освещение сенсорным прикосновением. Датчик позволяет управлять светодиодной нагрузкой в виде модулей или светодиодных лент …
Гаджеты для домашней автоматики – Емкостной сенсорViews: 1834 Управление светодиодным освещением – Сенсор емкостной. Данный гаджет предназначен для управления освещением где необходимо включением освещение сенсорным прикосновением. Датчик позволяет управлять светодиодной нагрузкой в виде модулей или светодиодных лент … WiFi ESP8266 – AT команды связанные с функцией TCP/IP (v.1.6.1)Views: 5448 AT команды связанные с функцией TCP/IP В этом разделе описаны команды которые позволяют устанавливать соединения между серверами и клиентами в сети. Приведено описание команд и примеры их выполнения. …
WiFi ESP8266 – AT команды связанные с функцией TCP/IP (v.1.6.1)Views: 5448 AT команды связанные с функцией TCP/IP В этом разделе описаны команды которые позволяют устанавливать соединения между серверами и клиентами в сети. Приведено описание команд и примеры их выполнения. … My libraries for Altium DesignerViews: 4499 Attention, this version of the database is outdated today. See updates in articles https://catcatcat.d-lan.dp.ua/altium-designer-my-setup-system-and-project-structure and https://catcatcat.d-lan.dp.ua/altium-designer-my-setup-system-and-project-structure-v23-2/ My libraries for Altium designer (Updated V – 29/05/2022) (c) 2021 …
My libraries for Altium DesignerViews: 4499 Attention, this version of the database is outdated today. See updates in articles https://catcatcat.d-lan.dp.ua/altium-designer-my-setup-system-and-project-structure and https://catcatcat.d-lan.dp.ua/altium-designer-my-setup-system-and-project-structure-v23-2/ My libraries for Altium designer (Updated V – 29/05/2022) (c) 2021 …