Views: 3518
PIC-контроллеры имеют на своем борту несколько CCP и ECCP модулей которые позволяют удовлетворить практически все варианты по применению ШИМ. В этом примере показано как реализовать простой одноканальный ШИМ и как оперативно управлять длительностью импульса.
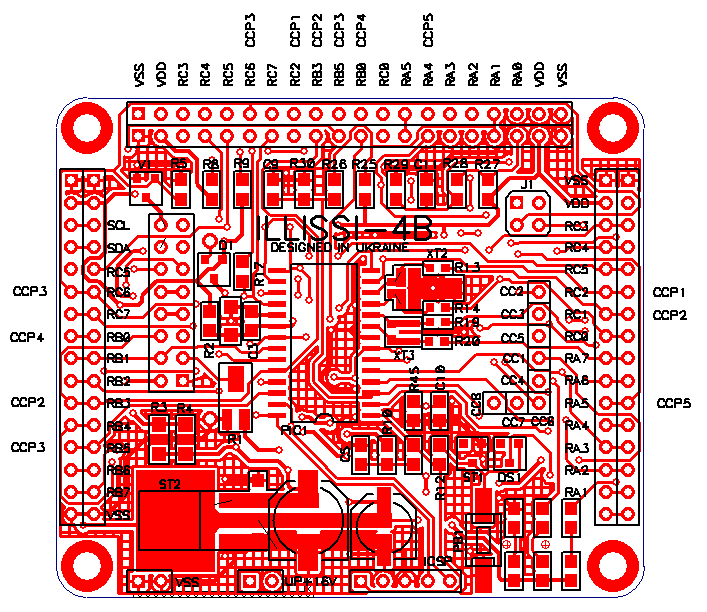
Схема платы ИЛЛИССИ-4B где можно получить выход ШИМ.
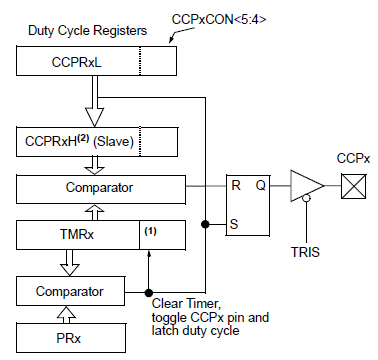
Для реализации ШИМ необходимо использовать CCPх модуль и таймер TIMER2(4/6). Блок схема реализации ШИМ.

Таймер предназначен для задания периода (частоты) работы ШИМ. CCP модуль для задания длительности импульса и формирование на выходе контроллера сигнала ШИМ.
Создание стандартного одноканального ШИМ.
Стандартный режим ШИМ позволяет генерировать Широтно-импульсное модуляцию (ШИМ) на контакте CCPx с разрешением до 10 разрядов. Период, рабочий цикл, и разрешение формируются при использовании следующих регистров:
• Регистр PRx
• Регистр TxCON
• Регистр CCPRxL
• Регистр CCPxCON
Последовательность настройки модуля CCP для формирования ШИМ следующая:
- Отключите выходной драйвер контакта CCPx, установив бит TRIS для соответствующего контакта.
- Выбрать соответствующий 8-разрядный таймер TimerX, (Timer2, Timer4 или Timer6), чтобы использоваться для генерации ШИМ устанавливая биты CxTSEL <1:0> в регистре Регистр CCPTMRSx.
- Загрузить регистр PRx для выбранного TimerX со значением периода ШИМ.
- Сконфигурируйте модуль CCP для режима ШИМ загружая в регистр CCPxCON соответствующее значение.
- Загрузите регистр CCPRxL и биты DCxB <1:0> регистра CCPxCON, значением рабочего цикла ШИМ.
- Соответственно настроить и включить 8-разрядный таймер TimerX: Если предполагается использовать прерывания от таймера – очистите бит флага прерывания TMRxIF в регистрах PIR2 или PIR4. Настройте предделитель (и если необходимо постделитель) таймера TxCON используя биты TxCKPS.
- Включить таймер, установив бит TMRxON в регистре TxCON. Активировать выходной контакт ШИМ: Ожидайте, пока будет установлен бит TMRxIF в регистре PIR2 или PIR4, а затем активировать выход ШИМ очистив соответствующий бит в регистре TRIS.
Период сигнала ШИМ можно рассчитать по формуле
PWM Period = [(PRx) + 1] * 4 * TOSC * (TMRx значение предделителя).
где, TOSC=1/Fosc.
Для нашей платы с тактовой 64 мГц мы получим PWM Period = (255+1)*4*(1/64000000)*16 = 0,000256 сек. Или 256 микросекунд. Для расчета можно загрузить файл в формате ME Setting_the_frequency_of_the_timer_TMP2.
Длительность импульса ШИМ можно рассчитать по формуле:
Pulse Width = (CCPRxL:CCPxCON<5:4>)* TOSC * (TMRx Prescale Value)
Примечание: обратите внимание на разрешение ШИМ, для этого необходимо обратиться к техническому описанию используемого контроллера, но хотелось бы сказать, что это актуально если необходимо использовать ШИМ для работы на более высоких частотах.
Программная реализация.
В нашем примере мы получим 10 разрядный ШИМ, это значит, что значение будет меняться в пределах от 0 до 1023 для периода от 0 до 100%. При “0” будет на выходе низкий уровень, при 1023 будет только высокий.
Настройка модуля ECCP1 в стандартном режиме.
CCP1CON=0b00001100; // настройка модуля в режиме шим T2CON=0b01111110; // настройка таймера PR2=255; // задание периода ШИМ CCPR1L=0; // очистка регистра длительности = 0
Для формирование длительности выберем две переменные основная в которой будем задавать длительность импульса
int pwm_reg; // основной регистр для формирования длительности
Дополнительный для организации обработки данных для загрузки в регистры CCP модуля
char pwm_reg2; // дополнительный регистр для обработки
Значение ширины импульса должна быть от 0-1023. Для загрузки в модуль CCP необходимо старшие 8 бит значения ШИМ загружать в регистр CCPR1L. Младшие два бита необходимо загрузить в биты 4 и 5 регистра CCP1CON. Один из вариантов как это можно сделать:
pwm_reg2=pwm_reg<<6; // pwm_reg2=pwm_reg2>>2; // CCP1CON &= 0b11001111; // CCP1CON |= pwm_reg2; // CCPR1L=pwm_reg>>2; //
Для тестирования модуля ШИМ будем использовать кнопки управления платы ИЛЛИССИ-4С. Они подключены к выводам Порта B RB4 – RB7.
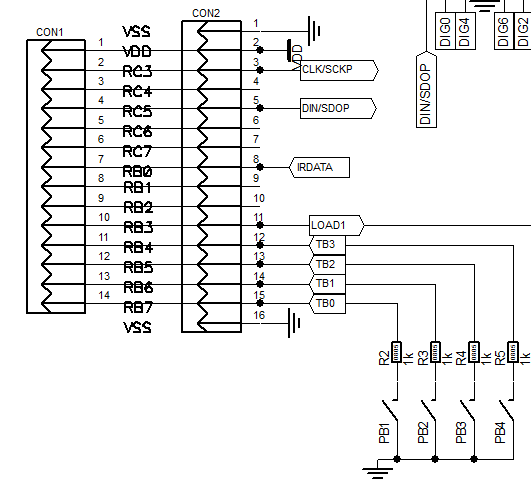
Для индикации подключим к выходу CCP1 светодиод, для демонстрации работы ШИМ (это восьмой контакт на вернем дополнительном разъеме).
Демонстрация работы
Кнопка 2 используется для переключения режима демонстрации с ручного на автоматический. Кнопка 3 и 4 для ручного увеличения или уменьшения длительности.
Загрузка демонстрационного проекта.
Версия – 1.1[wpdm_file id=71 template=”link-template-calltoaction3.php”]
Это может быть интересно
 Гаджеты для домашней автоматики – Датчик приближенияViews: 2255 Управление светодиодным освещением – Датчик приближения. Данный гаджет предназначен для управления внутренним освещением мебели. Датчик позволяет определить закрытие или открытие дверцы или ящика и при этом включать или …
Гаджеты для домашней автоматики – Датчик приближенияViews: 2255 Управление светодиодным освещением – Датчик приближения. Данный гаджет предназначен для управления внутренним освещением мебели. Датчик позволяет определить закрытие или открытие дверцы или ящика и при этом включать или … Цифровой тахометр для автомобиля CH-С3300Views: 2102 Тахометр Ch-С3300 предназначен для индикации и контроля оборотов, времени работы и максимальных оборотов развиваемых двигателем во время поездки. Датчиком может использоваться как обычный контактный прерыватель или выход датчика …
Цифровой тахометр для автомобиля CH-С3300Views: 2102 Тахометр Ch-С3300 предназначен для индикации и контроля оборотов, времени работы и максимальных оборотов развиваемых двигателем во время поездки. Датчиком может использоваться как обычный контактный прерыватель или выход датчика … Проект с использованием MCC часть 15Views: 1796 EUSART – Универсальный асинхронный приёмопередатчик (УАПП, англ. Universal Asynchronous Receiver-Transmitter, UART) — узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. … читать на вики. Внесем изменения в нашу схему, …
Проект с использованием MCC часть 15Views: 1796 EUSART – Универсальный асинхронный приёмопередатчик (УАПП, англ. Universal Asynchronous Receiver-Transmitter, UART) — узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. … читать на вики. Внесем изменения в нашу схему, … Проект с использованием MCC часть 05Views: 2258 Эту часть назовем так как избавься от delay, там где а это реально не надо. Для это нам потребуется научиться использовать прерывания и работать с таймерами. Что такое …
Проект с использованием MCC часть 05Views: 2258 Эту часть назовем так как избавься от delay, там где а это реально не надо. Для это нам потребуется научиться использовать прерывания и работать с таймерами. Что такое … MPLAB® Harmony – или как это просто! Часть 3.Views: 2296 Часть третья – копнём немного глубже. Вы наверное заметили, что во второй главе, вроде сначала все шло как по маслу, а потом, что бы заморгали светики, я вставил …
MPLAB® Harmony – или как это просто! Часть 3.Views: 2296 Часть третья – копнём немного глубже. Вы наверное заметили, что во второй главе, вроде сначала все шло как по маслу, а потом, что бы заморгали светики, я вставил … The art of DJViews: 271 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is …
The art of DJViews: 271 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is … DIXELL XWEB500D-EVO + RUT900 или как пробить NAT-серверViews: 1216 Когда необходимо под какой нибудь контроллер имеющий вэб сервер в инет, то нужен статический IP, что оказалось проблемой при работе с операторами сотовых сетей, конкретно с оператором сети …
DIXELL XWEB500D-EVO + RUT900 или как пробить NAT-серверViews: 1216 Когда необходимо под какой нибудь контроллер имеющий вэб сервер в инет, то нужен статический IP, что оказалось проблемой при работе с операторами сотовых сетей, конкретно с оператором сети … Altium Designer my setup system and project structureViews: 1097 Используйте только последнее обновление!!! Updates https://catcatcat.d-lan.dp.ua/altium-designer-my-libraries-project-templates-system-settings-by-catcatcat-v23-09/ Тут хочу поделиться как я настраиваю Altium Designer и как я использую файлы DXPPreferences.DXPPrf для быстрой конфигурации и получения …
Altium Designer my setup system and project structureViews: 1097 Используйте только последнее обновление!!! Updates https://catcatcat.d-lan.dp.ua/altium-designer-my-libraries-project-templates-system-settings-by-catcatcat-v23-09/ Тут хочу поделиться как я настраиваю Altium Designer и как я использую файлы DXPPreferences.DXPPrf для быстрой конфигурации и получения … AD9833 – Programmable Waveform GeneratorViews: 3091 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить …
AD9833 – Programmable Waveform GeneratorViews: 3091 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить … VU Meter Tower ARTViews: 1762 Стерео индикатор уровня аудио сигнала. Компактность и удобство проектирования устройств на светодиодах WS2812B, а также легкость реализации алгоритма родило идею созданию своей конструкции. В этом проекте я предоставлю …
VU Meter Tower ARTViews: 1762 Стерео индикатор уровня аудио сигнала. Компактность и удобство проектирования устройств на светодиодах WS2812B, а также легкость реализации алгоритма родило идею созданию своей конструкции. В этом проекте я предоставлю …