Views: 3517
PIC-контроллеры имеют на своем борту несколько CCP и ECCP модулей которые позволяют удовлетворить практически все варианты по применению ШИМ. В этом примере показано как реализовать простой одноканальный ШИМ и как оперативно управлять длительностью импульса.
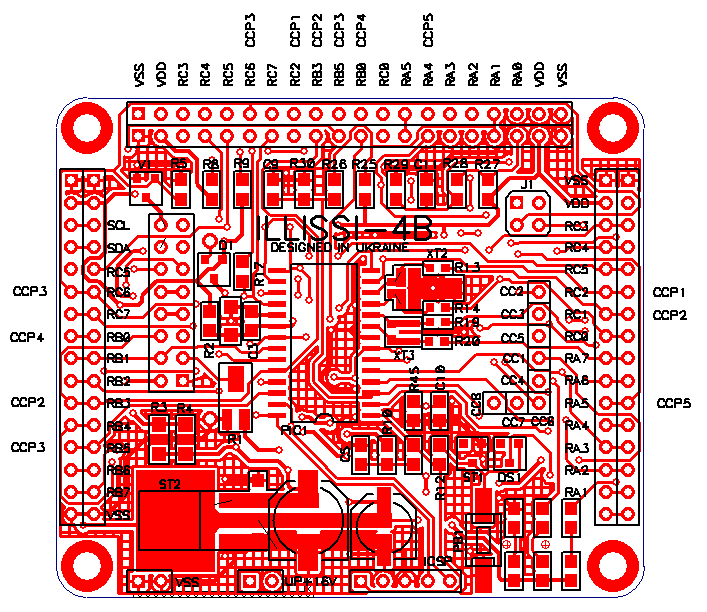
Схема платы ИЛЛИССИ-4B где можно получить выход ШИМ.
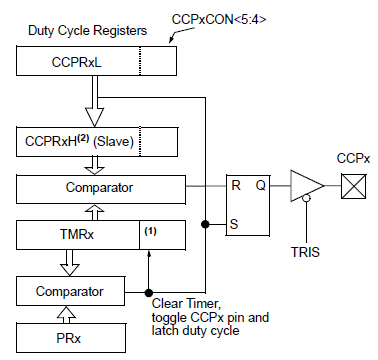
Для реализации ШИМ необходимо использовать CCPх модуль и таймер TIMER2(4/6). Блок схема реализации ШИМ.

Таймер предназначен для задания периода (частоты) работы ШИМ. CCP модуль для задания длительности импульса и формирование на выходе контроллера сигнала ШИМ.
Создание стандартного одноканального ШИМ.
Стандартный режим ШИМ позволяет генерировать Широтно-импульсное модуляцию (ШИМ) на контакте CCPx с разрешением до 10 разрядов. Период, рабочий цикл, и разрешение формируются при использовании следующих регистров:
• Регистр PRx
• Регистр TxCON
• Регистр CCPRxL
• Регистр CCPxCON
Последовательность настройки модуля CCP для формирования ШИМ следующая:
- Отключите выходной драйвер контакта CCPx, установив бит TRIS для соответствующего контакта.
- Выбрать соответствующий 8-разрядный таймер TimerX, (Timer2, Timer4 или Timer6), чтобы использоваться для генерации ШИМ устанавливая биты CxTSEL <1:0> в регистре Регистр CCPTMRSx.
- Загрузить регистр PRx для выбранного TimerX со значением периода ШИМ.
- Сконфигурируйте модуль CCP для режима ШИМ загружая в регистр CCPxCON соответствующее значение.
- Загрузите регистр CCPRxL и биты DCxB <1:0> регистра CCPxCON, значением рабочего цикла ШИМ.
- Соответственно настроить и включить 8-разрядный таймер TimerX: Если предполагается использовать прерывания от таймера – очистите бит флага прерывания TMRxIF в регистрах PIR2 или PIR4. Настройте предделитель (и если необходимо постделитель) таймера TxCON используя биты TxCKPS.
- Включить таймер, установив бит TMRxON в регистре TxCON. Активировать выходной контакт ШИМ: Ожидайте, пока будет установлен бит TMRxIF в регистре PIR2 или PIR4, а затем активировать выход ШИМ очистив соответствующий бит в регистре TRIS.
Период сигнала ШИМ можно рассчитать по формуле
PWM Period = [(PRx) + 1] * 4 * TOSC * (TMRx значение предделителя).
где, TOSC=1/Fosc.
Для нашей платы с тактовой 64 мГц мы получим PWM Period = (255+1)*4*(1/64000000)*16 = 0,000256 сек. Или 256 микросекунд. Для расчета можно загрузить файл в формате ME Setting_the_frequency_of_the_timer_TMP2.
Длительность импульса ШИМ можно рассчитать по формуле:
Pulse Width = (CCPRxL:CCPxCON<5:4>)* TOSC * (TMRx Prescale Value)
Примечание: обратите внимание на разрешение ШИМ, для этого необходимо обратиться к техническому описанию используемого контроллера, но хотелось бы сказать, что это актуально если необходимо использовать ШИМ для работы на более высоких частотах.
Программная реализация.
В нашем примере мы получим 10 разрядный ШИМ, это значит, что значение будет меняться в пределах от 0 до 1023 для периода от 0 до 100%. При “0” будет на выходе низкий уровень, при 1023 будет только высокий.
Настройка модуля ECCP1 в стандартном режиме.
CCP1CON=0b00001100; // настройка модуля в режиме шим T2CON=0b01111110; // настройка таймера PR2=255; // задание периода ШИМ CCPR1L=0; // очистка регистра длительности = 0
Для формирование длительности выберем две переменные основная в которой будем задавать длительность импульса
int pwm_reg; // основной регистр для формирования длительности
Дополнительный для организации обработки данных для загрузки в регистры CCP модуля
char pwm_reg2; // дополнительный регистр для обработки
Значение ширины импульса должна быть от 0-1023. Для загрузки в модуль CCP необходимо старшие 8 бит значения ШИМ загружать в регистр CCPR1L. Младшие два бита необходимо загрузить в биты 4 и 5 регистра CCP1CON. Один из вариантов как это можно сделать:
pwm_reg2=pwm_reg<<6; // pwm_reg2=pwm_reg2>>2; // CCP1CON &= 0b11001111; // CCP1CON |= pwm_reg2; // CCPR1L=pwm_reg>>2; //
Для тестирования модуля ШИМ будем использовать кнопки управления платы ИЛЛИССИ-4С. Они подключены к выводам Порта B RB4 – RB7.
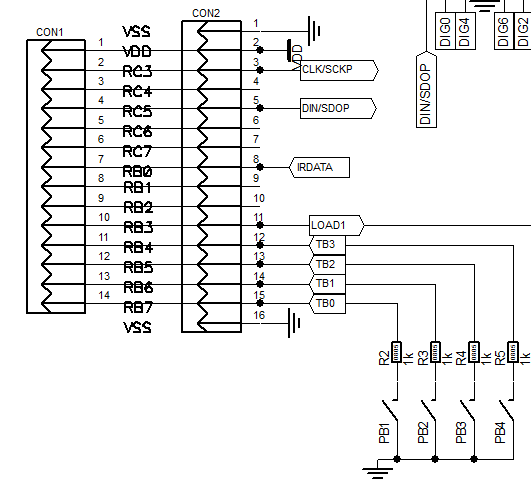
Для индикации подключим к выходу CCP1 светодиод, для демонстрации работы ШИМ (это восьмой контакт на вернем дополнительном разъеме).
Демонстрация работы
Кнопка 2 используется для переключения режима демонстрации с ручного на автоматический. Кнопка 3 и 4 для ручного увеличения или уменьшения длительности.
Загрузка демонстрационного проекта.
Версия – 1.1[wpdm_file id=71 template=”link-template-calltoaction3.php”]
Это может быть интересно
 MCC PIC24 – модуль REAL-TIME CLOCK AND CALENDAR (RTCC)Views: 719 RTCC предоставляет пользователю часы реального времени и функция календаря (RTCC), точность “хода” может быть откалибрована. Основные особенности модуля RTCC: • Работает в режиме глубокого сна. • Возможность выбора источника …
MCC PIC24 – модуль REAL-TIME CLOCK AND CALENDAR (RTCC)Views: 719 RTCC предоставляет пользователю часы реального времени и функция календаря (RTCC), точность “хода” может быть откалибрована. Основные особенности модуля RTCC: • Работает в режиме глубокого сна. • Возможность выбора источника … I2C MODULE – PIC18F25K42 Device ID Revision = A001Views: 1208 I2C MODULE Обход ошибок в версии I2C MODULE – PIC18F25K42 Device ID Revision = A001 В Серии K42 применен совершенно новый модуль шины I2C, который позволяет поддерживать все …
I2C MODULE – PIC18F25K42 Device ID Revision = A001Views: 1208 I2C MODULE Обход ошибок в версии I2C MODULE – PIC18F25K42 Device ID Revision = A001 В Серии K42 применен совершенно новый модуль шины I2C, который позволяет поддерживать все … My libraries for Altium DesignerViews: 4497 Attention, this version of the database is outdated today. See updates in articles https://catcatcat.d-lan.dp.ua/altium-designer-my-setup-system-and-project-structure and https://catcatcat.d-lan.dp.ua/altium-designer-my-setup-system-and-project-structure-v23-2/ My libraries for Altium designer (Updated V – 29/05/2022) (c) 2021 …
My libraries for Altium DesignerViews: 4497 Attention, this version of the database is outdated today. See updates in articles https://catcatcat.d-lan.dp.ua/altium-designer-my-setup-system-and-project-structure and https://catcatcat.d-lan.dp.ua/altium-designer-my-setup-system-and-project-structure-v23-2/ My libraries for Altium designer (Updated V – 29/05/2022) (c) 2021 … Простой оптический сенсор приближенияОптический сенсор, назначение оптический концевик, для автоматики, бесконтактный выключатель с функцией автоматического отключения...
Простой оптический сенсор приближенияОптический сенсор, назначение оптический концевик, для автоматики, бесконтактный выключатель с функцией автоматического отключения... Четырех канальный терморегулятор ch-4000Views: 3443 Четыре независимых канала регулирования температуры, одновременно можно подключить 16 датчиков температуры DS18B20 с удалением до трехсот метров. Можно для регулировки выбрать любой датчик, подключенный к устройству. Каждый канал может работать …
Четырех канальный терморегулятор ch-4000Views: 3443 Четыре независимых канала регулирования температуры, одновременно можно подключить 16 датчиков температуры DS18B20 с удалением до трехсот метров. Можно для регулировки выбрать любой датчик, подключенный к устройству. Каждый канал может работать … Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0Views: 313 Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0 Here I want to share how I configure Altium Designer and how I use the DXPPreferences1.DXPPrf …
Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0Views: 313 Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0 Here I want to share how I configure Altium Designer and how I use the DXPPreferences1.DXPPrf … Real-time music visualization technologyViews: 400 Music visualization technology in real time (RTMV-technology). Я не музикант і я не маю спеціальної музичної освіти, я інженер розробник вбудованих систем. Але моє хобі розроблення технології візуалізації …
Real-time music visualization technologyViews: 400 Music visualization technology in real time (RTMV-technology). Я не музикант і я не маю спеціальної музичної освіти, я інженер розробник вбудованих систем. Але моє хобі розроблення технології візуалізації … LATINO – открытый проект ch-светомузыкиViews: 1779 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была …
LATINO – открытый проект ch-светомузыкиViews: 1779 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была … ESP32-первое знакомствоViews: 7324 Музыкальная тема к статье, слушаем: Настало время познакомиться c ESP32 и для меня, для этого я приобрел в ГАММЕ отладочную плату с модулем ESP-WROOM-32 (ESP32-DevKitC). Первая задача, как …
ESP32-первое знакомствоViews: 7324 Музыкальная тема к статье, слушаем: Настало время познакомиться c ESP32 и для меня, для этого я приобрел в ГАММЕ отладочную плату с модулем ESP-WROOM-32 (ESP32-DevKitC). Первая задача, как … LCD индикаторы на драйвере ML1001Views: 2065 ML1001 – статический LCD GOG (чип в стекле) драйвер для 40-сегментного LCD в позолоченном противоударном исполнении. На них можно каскадно строить цельные из 80 или 120 сегментов LCD индикаторы. …
LCD индикаторы на драйвере ML1001Views: 2065 ML1001 – статический LCD GOG (чип в стекле) драйвер для 40-сегментного LCD в позолоченном противоударном исполнении. На них можно каскадно строить цельные из 80 или 120 сегментов LCD индикаторы. …