Views: 3482
PIC-контроллеры имеют на своем борту несколько CCP и ECCP модулей которые позволяют удовлетворить практически все варианты по применению ШИМ. В этом примере показано как реализовать простой одноканальный ШИМ и как оперативно управлять длительностью импульса.
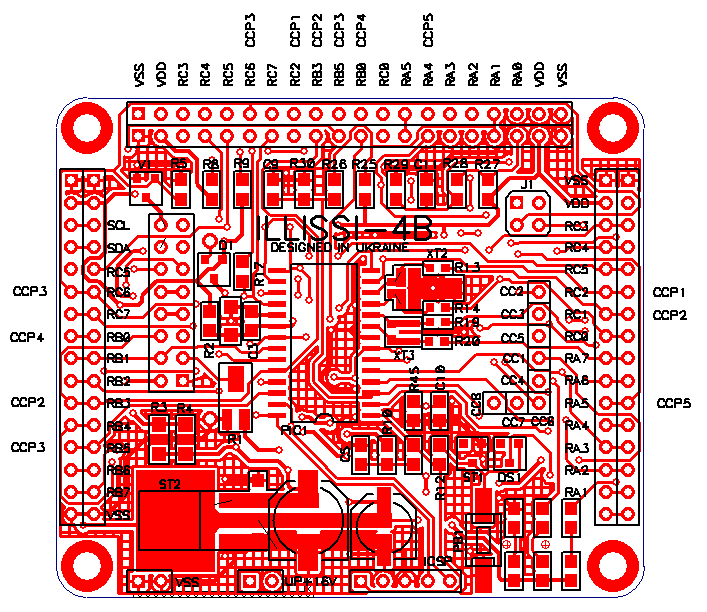
Схема платы ИЛЛИССИ-4B где можно получить выход ШИМ.
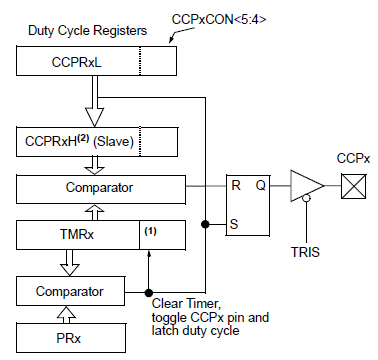
Для реализации ШИМ необходимо использовать CCPх модуль и таймер TIMER2(4/6). Блок схема реализации ШИМ.

Таймер предназначен для задания периода (частоты) работы ШИМ. CCP модуль для задания длительности импульса и формирование на выходе контроллера сигнала ШИМ.
Создание стандартного одноканального ШИМ.
Стандартный режим ШИМ позволяет генерировать Широтно-импульсное модуляцию (ШИМ) на контакте CCPx с разрешением до 10 разрядов. Период, рабочий цикл, и разрешение формируются при использовании следующих регистров:
• Регистр PRx
• Регистр TxCON
• Регистр CCPRxL
• Регистр CCPxCON
Последовательность настройки модуля CCP для формирования ШИМ следующая:
- Отключите выходной драйвер контакта CCPx, установив бит TRIS для соответствующего контакта.
- Выбрать соответствующий 8-разрядный таймер TimerX, (Timer2, Timer4 или Timer6), чтобы использоваться для генерации ШИМ устанавливая биты CxTSEL <1:0> в регистре Регистр CCPTMRSx.
- Загрузить регистр PRx для выбранного TimerX со значением периода ШИМ.
- Сконфигурируйте модуль CCP для режима ШИМ загружая в регистр CCPxCON соответствующее значение.
- Загрузите регистр CCPRxL и биты DCxB <1:0> регистра CCPxCON, значением рабочего цикла ШИМ.
- Соответственно настроить и включить 8-разрядный таймер TimerX: Если предполагается использовать прерывания от таймера – очистите бит флага прерывания TMRxIF в регистрах PIR2 или PIR4. Настройте предделитель (и если необходимо постделитель) таймера TxCON используя биты TxCKPS.
- Включить таймер, установив бит TMRxON в регистре TxCON. Активировать выходной контакт ШИМ: Ожидайте, пока будет установлен бит TMRxIF в регистре PIR2 или PIR4, а затем активировать выход ШИМ очистив соответствующий бит в регистре TRIS.
Период сигнала ШИМ можно рассчитать по формуле
PWM Period = [(PRx) + 1] * 4 * TOSC * (TMRx значение предделителя).
где, TOSC=1/Fosc.
Для нашей платы с тактовой 64 мГц мы получим PWM Period = (255+1)*4*(1/64000000)*16 = 0,000256 сек. Или 256 микросекунд. Для расчета можно загрузить файл в формате ME Setting_the_frequency_of_the_timer_TMP2.
Длительность импульса ШИМ можно рассчитать по формуле:
Pulse Width = (CCPRxL:CCPxCON<5:4>)* TOSC * (TMRx Prescale Value)
Примечание: обратите внимание на разрешение ШИМ, для этого необходимо обратиться к техническому описанию используемого контроллера, но хотелось бы сказать, что это актуально если необходимо использовать ШИМ для работы на более высоких частотах.
Программная реализация.
В нашем примере мы получим 10 разрядный ШИМ, это значит, что значение будет меняться в пределах от 0 до 1023 для периода от 0 до 100%. При “0” будет на выходе низкий уровень, при 1023 будет только высокий.
Настройка модуля ECCP1 в стандартном режиме.
CCP1CON=0b00001100; // настройка модуля в режиме шим T2CON=0b01111110; // настройка таймера PR2=255; // задание периода ШИМ CCPR1L=0; // очистка регистра длительности = 0
Для формирование длительности выберем две переменные основная в которой будем задавать длительность импульса
int pwm_reg; // основной регистр для формирования длительности
Дополнительный для организации обработки данных для загрузки в регистры CCP модуля
char pwm_reg2; // дополнительный регистр для обработки
Значение ширины импульса должна быть от 0-1023. Для загрузки в модуль CCP необходимо старшие 8 бит значения ШИМ загружать в регистр CCPR1L. Младшие два бита необходимо загрузить в биты 4 и 5 регистра CCP1CON. Один из вариантов как это можно сделать:
pwm_reg2=pwm_reg<<6; // pwm_reg2=pwm_reg2>>2; // CCP1CON &= 0b11001111; // CCP1CON |= pwm_reg2; // CCPR1L=pwm_reg>>2; //
Для тестирования модуля ШИМ будем использовать кнопки управления платы ИЛЛИССИ-4С. Они подключены к выводам Порта B RB4 – RB7.
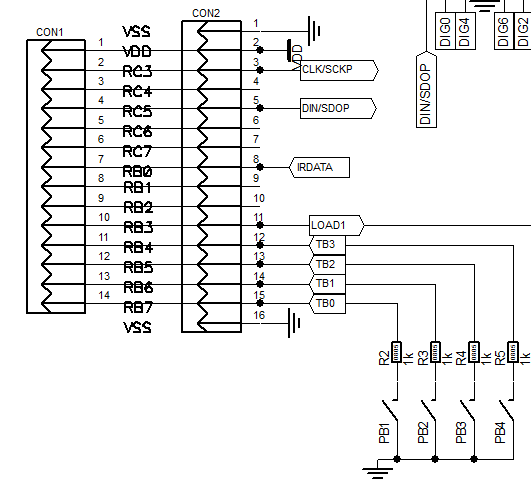
Для индикации подключим к выходу CCP1 светодиод, для демонстрации работы ШИМ (это восьмой контакт на вернем дополнительном разъеме).
Демонстрация работы
Кнопка 2 используется для переключения режима демонстрации с ручного на автоматический. Кнопка 3 и 4 для ручного увеличения или уменьшения длительности.
Загрузка демонстрационного проекта.
Версия – 1.1[wpdm_file id=71 template=”link-template-calltoaction3.php”]
Это может быть интересно
 ch-4060 – регулятор температуры и влажности на датчике DHT11/DHT22/AM2302Views: 2469 На плате ch-4000 очень легко собрать устройство регулятора температуры и влажности. Датчик DHT11 самый недорогой вариант для создания такого устройства, правда точность его не велика, но для бытовых устройств …
ch-4060 – регулятор температуры и влажности на датчике DHT11/DHT22/AM2302Views: 2469 На плате ch-4000 очень легко собрать устройство регулятора температуры и влажности. Датчик DHT11 самый недорогой вариант для создания такого устройства, правда точность его не велика, но для бытовых устройств … Применение typedef, struct и unionViews: 8880 Полезные описания переменных Часто необходимо в памяти расположить последовательно разные виды данных, что бы потом можно было их использовать. Полезные ссылки Взято и переработано с сайта http://www.butovo.com/~zss/cpp/struct.htm http://cppstudio.com/post/9172/ …
Применение typedef, struct и unionViews: 8880 Полезные описания переменных Часто необходимо в памяти расположить последовательно разные виды данных, что бы потом можно было их использовать. Полезные ссылки Взято и переработано с сайта http://www.butovo.com/~zss/cpp/struct.htm http://cppstudio.com/post/9172/ … Универсальный терморегулятор ch-c3000Views: 3138 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в …
Универсальный терморегулятор ch-c3000Views: 3138 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в … Проект с использованием MCC часть 01Views: 2638 Для изучения MCC я выбрал простой контроллер PIC16F1509. Выбор его был обусловлен богатой новой периферией которую можно изучить. Для начала была собрана схема на макетной плате Внешний вид …
Проект с использованием MCC часть 01Views: 2638 Для изучения MCC я выбрал простой контроллер PIC16F1509. Выбор его был обусловлен богатой новой периферией которую можно изучить. Для начала была собрана схема на макетной плате Внешний вид … Униполярный шаговый двигательViews: 2384 В приводах различных устройств часто применяются шаговые двигатели, Шаговый двигатели различают двух типов униполярные – когда обмотки коммутируются током текущим только в одну сторону, например при …
Униполярный шаговый двигательViews: 2384 В приводах различных устройств часто применяются шаговые двигатели, Шаговый двигатели различают двух типов униполярные – когда обмотки коммутируются током текущим только в одну сторону, например при … Сенсорный выключатель светаViews: 13878 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида …
Сенсорный выключатель светаViews: 13878 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида … TM1650 драйвер LED семисегментного индикатораViews: 18159 Китайский производитель Shenzhen Titan Micro Electronics Co., Ltd. Выпускает широкую линейку драйверов управления светодиодными дисплеями, которые позволяют разгрузить микроконтроллер для основной работы, главная особенность этих драйверов не только …
TM1650 драйвер LED семисегментного индикатораViews: 18159 Китайский производитель Shenzhen Titan Micro Electronics Co., Ltd. Выпускает широкую линейку драйверов управления светодиодными дисплеями, которые позволяют разгрузить микроконтроллер для основной работы, главная особенность этих драйверов не только … Гаджеты для домашней автоматики – Емкостной сенсорViews: 1777 Управление светодиодным освещением – Сенсор емкостной. Данный гаджет предназначен для управления освещением где необходимо включением освещение сенсорным прикосновением. Датчик позволяет управлять светодиодной нагрузкой в виде модулей или светодиодных лент …
Гаджеты для домашней автоматики – Емкостной сенсорViews: 1777 Управление светодиодным освещением – Сенсор емкостной. Данный гаджет предназначен для управления освещением где необходимо включением освещение сенсорным прикосновением. Датчик позволяет управлять светодиодной нагрузкой в виде модулей или светодиодных лент … LM317 и светодиодыViews: 8071 LM317 и светодиоды статья с переработанная с сайта http://invent-systems.narod.ru/LM317.htm Долговечность светодиодов определяется качеством изготовления кристалла, а для белых светодиодов еще и качеством люминофора. В процессе эксплуатации скорость деградации кристалла …
LM317 и светодиодыViews: 8071 LM317 и светодиоды статья с переработанная с сайта http://invent-systems.narod.ru/LM317.htm Долговечность светодиодов определяется качеством изготовления кристалла, а для белых светодиодов еще и качеством люминофора. В процессе эксплуатации скорость деградации кристалла … OLED RET012864E/REX012864JViews: 1566 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как …
OLED RET012864E/REX012864JViews: 1566 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как …