Views: 2572
Цифровой ввод данных – Чтение состояния кнопок.
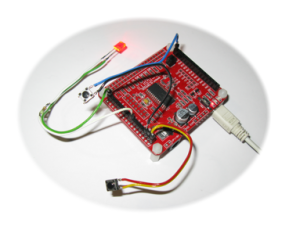
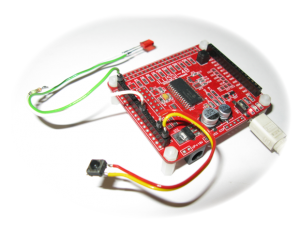
Для реализации этого проекта нам потребуется две тактовые кнопки. Надо будет к их выводам припаять проводки с контактами.
Порты контроллера (в последних моделях) Представляют собой комбинацию из четырех основных регистров. Это регистры управления направлением передачи цифровых (данных с логическими уровнями) данных TRIS. Регистры ввода цифровых данных PORT. Регистры вывода цифровых данных LAT. И регистры отвечающие за тип данных, т.е.аналоговые или цифровые ANSEL.
Для нашего примера мы будем использовать порт B. Для контроля мы применим светодиод подключенный к выводу RB1. Для ввода информации мы будем использовать выводы порта RB7 и RB6. К этим портам мы подключим тактовые кнопки.
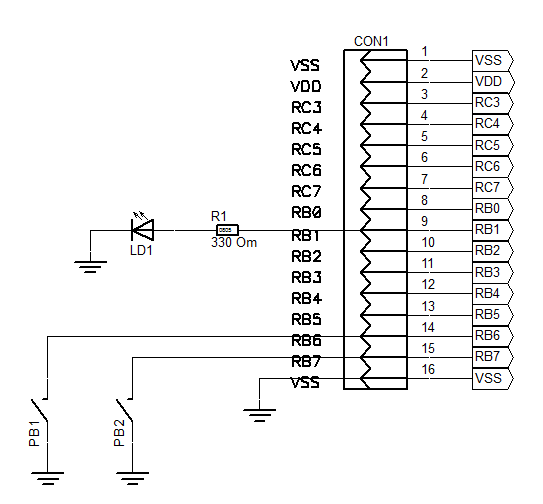 Схема приведена применительно к плате ILLISSI-4B-primum. Теперь когда мы собрали схему начинается самое интересное.
Схема приведена применительно к плате ILLISSI-4B-primum. Теперь когда мы собрали схему начинается самое интересное.
Первое это надо правильно сконфигурировать порты контроллера. В нашего контроллера PIC16F1936 три порта A, B, C. Первые два могут работать и аналоговыми сигналами. Третий только цифровой.
Возможный вариант настройки портов и тактового генератора:
// настройка внутренего генератора 8*4=32мГц
OSCCON=0b11110000;
// ||||||||
// ||||| ++-- SCS<1:0> основной гене-р (раб. через PLL)
// |++++----- IRCF<3:0> частота 8 мГц
// +--------- SPLLEN умножитель 1-включен
// конфигурирование портов микроконтроллера
TRISA = 0; // настроить на вывод данных
PORTA = 0; // установит низний уровень
ANSELA = 0; // настроить как цифровой
TRISB = 0b11000000; //два на ввод данных, остальные на вывод
// || +--- порт на вывод данных - RB1 инд. - светодиод
// |+ --------- порт на ввод данных - RB6
// +---------- порт на ввод данных - RB7
PORTB = 0; // установит низний уровень
ANSELB = 0; // настроить как цифровой
PORTC = 0; // настроить на вывод данных
TRISC = 0; // установит низкий уровень
nWPUEN = 0; // включить резисторы
WPUB = 0b11000000; // выключить подтягивающие резисторы на выводах 5-0 (по сбросу включены)
Теперь необходимо к портам на которых установлены тактовые кнопки создать высокий проверь. Для этого мы будем использовать подтягивающие резисторы WEAK PULL-UPS которые встроены в порт B. Для этого необходимо выполнить следующее:
nWPUEN = 0; // включить резисторы WPUB = 0b11000000; // выключить подтягивающие резисторы на выводах 5-0 (по сбросу включены)
На этом настройки контроллера окончены, теперь приступаем к самой программе.
Кода мы активировали подтягивающие резисторы на выводах Порта B устанавливается высокий логический уровень. При нажатии на тактовую кнопку она замыкается и уровень изменяется на низкий.
Для проверки работы кнопки будем использовать включение светодиода.
while (1)
{
CLRWDT(); // сброс сторожевого таймера
if (RB6==0)LATB1=1;
else LATB1=0;
}
В этом примере мы проверяем состояние на входе порта рано “0” (низкому уровню, если да включаем светодиод, иначе выключаем.
Хоть наши достижения и радуют, но усложним программу. Сделаем так чтобы при одном нажатии на нашу кнопку светодиод загорался, а при втором погасал. В принципе ничего сложного, только один маленький нюанс. При замы замыкании или размыкании механического контакта, происходить так называемый “дребезг”.
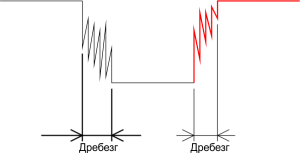 В нашей схеме уровни сигнала будут иметь следующий вид. Это происходит в следствии свойства механического контакта, при соединении контактов сопротивление изменяется пропорционально силе сжатия и на протяжении 10-20 миллисекунд, пока кнопка нажимается возникает такой переходной процесс. Когда уровень сигнала пересекает логический уровень переключения входа порта контроллера, контроллер из-за своей высокой скорости опроса порта может “решить”, что кнопка нажималась не один раз а 20 :). Поэтому для входов которые выполняют подсчет импульсов приходящих с механических контактов необходимо решить проблему “отсеивания” дребезга контакта. Как это решить. Логически это решается просто. При опросе входа порта, если программа обнаружила низкий логический уровень необходимо подождать 10 миллисекунд и снова проверить уровень на входе порта. Если уровень низкий, делаем вывод кнопка нажата, если уровень высокий, значит была “какая то помеха”.
В нашей схеме уровни сигнала будут иметь следующий вид. Это происходит в следствии свойства механического контакта, при соединении контактов сопротивление изменяется пропорционально силе сжатия и на протяжении 10-20 миллисекунд, пока кнопка нажимается возникает такой переходной процесс. Когда уровень сигнала пересекает логический уровень переключения входа порта контроллера, контроллер из-за своей высокой скорости опроса порта может “решить”, что кнопка нажималась не один раз а 20 :). Поэтому для входов которые выполняют подсчет импульсов приходящих с механических контактов необходимо решить проблему “отсеивания” дребезга контакта. Как это решить. Логически это решается просто. При опросе входа порта, если программа обнаружила низкий логический уровень необходимо подождать 10 миллисекунд и снова проверить уровень на входе порта. Если уровень низкий, делаем вывод кнопка нажата, если уровень высокий, значит была “какая то помеха”.
Для реализации такого варианта программы нам понадобиться еще один контрольный флаг. Назовем его NAG. Для чего он нужен. Он необходим чтобы программа могла понять при тестировании порта кнопка “только что нажата” или “уже давно начата”. Без этого флага у нас не получиться счетного входа.
while (1)// основной цикл программ
{
CLRWDT(); // сброс сторожевого таймера
if (RB6==0) // тестируем состояние порта
{
__delay_ms(10); // ожидаем 10 мс, пропускаем дребезг
if (RB6==0&&NAG==0) // снова тестируем состояние порта и флаг "кнопка была нажата"
{ // если уровень низкий и клавиша, до этого не была нажата" выполняем код в скобках
NAG=1; // устанавливаем флаг кнопка нажата
LATB1=!LATB1; // переключаем свечение светодиода
}
}
else
{
NAG=0; // сбросить флаг "кнопка нажата" - исходя из логики
}
} // конец основного цикла
Что делает эта программа описано в комментариях к каждой строке. Запустите программу и проверьте её работу. Одно примечание, контакты бывают разные, тактовая кнопка это один из вариантов “почти идеального” контакта, если в режиме тестирования вы наблюдаете, что “не четко срабатывает счет”, например, наблюдается при нажатии несколько переключений светодиода. То необходимо увеличить величину задержки.
Как видите из этих промеров – микроконтроллеры это просто.
В заключении усложним программу. Подключит к плате вторую кнопку. И используя интерфейс связи с ПК (программу Serial Bootloader AN1310). Организуем реверсивной счетчик. Информация будет выводиться прямо в оно программы.
Саму программу описывать не буду, Пора включить мозги и разобрать самостоятельно. Для пояснения добавлю, что мы будем использовать стандартную библиотеку Си stdio.h. из её нас интересует функция printf. Для работы последовательным интерфейсом необходимо будет включить в нашей прорамме модуль UART и настроисть скорость для приложений в программе AN1310 – 115200 бод.
Все сообщения на ПК выводим на английском, к сожалению русскими символами наш терминал программы AN1310 не владеет только ANSI.
/************************************************************************
* Copyright (c) 2012, Project - ILLISSI.
*
* Демонстрационная программа "опрос тактовых кнопок" + связи с последовательным портом
* системная плата ILLISSI-B4-primum
* для контроллеров PIC16(L)F1936
* функции
* при нажатии на клавиатуре ПК клавиши "1" - можно включать выключать светодиод на демо плате
* при нажатии на кнопки на демо плате можно включать ылючать светодиод, при этом увеличивается
* или уменьшается состояние переменной counter, значение которой выводиться на ПК.
* Author Date Comment
*************************************************************************
* Гена Чернов 27/07/12 V1.0
*
************************************************************************/
#include
#include
// конфигурирование контроллера
__CONFIG(
FOSC_INTOSC & // INTOSC oscillator: I/O function on CLKIN pin
WDTE_ON & // WDT disabled
PWRTE_ON & // PWRT enabled
MCLRE_ON & // MCLR/VPP pin function is digital input
CP_ON & // Program memory code protection is enabled
CPD_ON & // Data memory code protection is enabled
BOREN_ON & // Brown-out Reset enabled
CLKOUTEN_OFF & // CLKOUT function is disabled. I/O or oscillator function on the CLKOUT pin
IESO_OFF & // Internal/External Switchover mode is disabled
FCMEN_OFF); // Fail-Safe Clock Monitor is disabled
__CONFIG(
WRT_ALL & // 000h to 7FFh write protected, no addresses may be modified by EECON control
PLLEN_ON & // 4x PLL enabled
STVREN_OFF & // Stack Overflow or Underflow will not cause a Reset
BORV_HI & // Brown-out Reset Voltage (VBOR) set to 2.7V
LVP_OFF); // High-voltage on MCLR/VPP must be used for programming
#define _XTAL_FREQ 32000000
#define BAUDRG 68 // 115.2Kbps from 32MHz (BRG16 = 1)
__EEPROM_DATA(0, 1, 2, 3, 4, 5, 6, 7);
unsigned char data;
void interrupt isr(void);
void putch(unsigned char byte);
bit NAG;
int counter;
//--------------------------------
void main(void)
{
CLRWDT(); // сброс сторожевого таймера
// настройка генератора 8*4=32мГц
OSCCON=0b11110000;
// ||||||||
// ||||| ++-- SCS основной генератор (работа через PLL)
// |++++----- IRCF частота 8 мГц
// +--------- SPLLEN умножитель 1-включен
// конфигурирование портов
TRISA = 0;
PORTA = 0;
ANSELA = 0;
TRISB = 0b11000000; // это типа гибридной настройки, два на ввод данных, остальные на вывод
// || +--- порт на вывод данных - RB1 индикация - светодиод
// |+--------- порт на ввод данных - RB6
// +---------- порт на ввод данных - RB7
PORTB = 0;
ANSELB = 0;
PORTC = 0;
TRISC = 0b11000000; // для работы EUSART
SPBRGH = 0;
SPBRG = BAUDRG;
BAUDCON = 0; // регистр управления скорости передачи
BRG16 = 1; // установить бит BRG16: используется 16-битный генератор Baud Rate
TXSTA = 0b00100100;
// |||||||+--TX9D:
// ||||||+---TRMT:Transmit Shift Register Status bit
// |||||+----BRGH:1 = High speed
// ||||+-----SENDB:Send Break Character bit
// |||+------SYNC:0 = Asynchronous mode
// ||+-------TXEN:1 = Transmit enabled
// |+--------TX9:0 = Selects 8-bit transmission
// +---------CSRC: в асинхронном режиме не имеет значения (Все равно)
RCSTA = 0b10010000;
// |||||||+--RX9D:
// ||||||+---OERR: Overrun Error bit
// |||||+----FERR: Framing Error bit
// ||||+-----ADDEN: Address Detect Enable bit
// |||+------CREN:1 = Enables receiver
// ||+-------SREN: Single Receive Enable bit (Все равно)
// |+--------RX9: 9-bit Receive Enable bit
// +---------SPEN: Serial Port Enable bit Serial port enabled
// configure timer 0 for maximum prescaler and enable interrupt
TMR0 = 0;
T0IE = 1;
OPTION_REG = 0b11010111;
nWPUEN = 0; // включить резисторы
WPUB = 0b11000000; // выключить подтягивающие резисторы на выводах 5-0 (по сбросу включены)
__delay_ms (100); // запрос задержки в миллисекундах
ei(); // включить прерывания
printf("\n\n Version = 1.01 \r\n\n");
printf(" Poll clock buttons!! \nPIC16(L)F1936 Demosoft\r\n");
printf(" web site illissi.com\r\n");
printf(" click!\r\n");
//--------------------------------------------------------------------------
while (1)
{
CLRWDT(); // сброс сторожевого таймера
if(RCIF)
{
// RCIF=0;
if(FERR && (RC7 == 0))
{
// RXD состояние BREAK обнаружено, переключиться обратно в режим загрузчика.
di(); // отключить прерыания
#asm
clrf _PCLATH // сбросить страший регистр счетчика алресса
goto 0 // (должно быть выполненно только из основного цикла, чтобы избежать переполнения стека вызовов)
#endasm
}
data = RCREG;
// putch(data);
switch(data)
{
case '1':
putch(data);
LATB1=!LATB1;
break;
default:
printf("\r\n");
putch(data);
printf(" - it is not a command, type the commands LEDs 1,2,3,4\r\n");
break;
}
}
if (RB6==0) // тестируем состояние порта
{
__delay_ms(10); // ожидаем 10 мс, пропускаем дребезг
if (RB6==0&&NAG==0) // снова тестируем состояние порта и флага "кнопка была нажата"
{ // если уровень низкий и клавиша, до этого не была нажата" выполняем код в скобках
NAG=1; // устанавливаем флаг кнопка нажата
LATB1=!LATB1; // переключаем свечение светодиода
counter++;
printf("counter++: %d\r\n", counter);
}
}
else if (RB7==0) // тестируем состояние порта
{
__delay_ms(10); // ожидаем 10 мс, пропускаем дребезг
if (RB7==0&&NAG==0) // снова тестируем состояние порта и флага "кнопка была нажата"
{ // если уровень низкий и клавиша, до этого не была нажата" выполняем код в скобках
NAG=1; // устанавливаем флаг кнопка нажата
LATB1=!LATB1; // переключаем свечение светодиода
counter--;
printf("counter--: %d\r\n", counter);
}
}
else
{
NAG=0; // сбросить флаг "кнопка нажата" - исходя из логики
}
}
}//
// прерывания
void interrupt isr(void)
{
static signed char timerd = 0;
T0IF = 0;
if(timerd++ > 20) // период мигания светодиода
{
timerd = 0;
LATB0=!LATB0; // индикация работы таймера
}
}//
// передача байта
void putch(unsigned char byte)
{
while(TXIF == 0); // ожидание готовности передачи
TXREG = byte;
}//
Загрузить первый пример
Цифровой ввод данных - Чтение состояния кнопок 00 1.35 KB 860 downloads
Цифровой ввод данных - Чтение состояния кнопок...Цифровой ввод данных - Чтение состояния кнопок 01 1.62 KB 777 downloads
Цифровой ввод данных - Чтение состояния кнопок...Цифровой ввод данных - Чтение состояния кнопок 02 2.97 KB 769 downloads
Цифровой ввод данных - Чтение состояния кнопок...Цифровой ввод данных - Чтение состояния кнопок 03 9.43 KB 899 downloads
Цифровой ввод данных - Чтение состояния кнопок...
Это может быть интересно
 HVLD модуль на примере PIC24FJ128GA204Views: 757 HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что …
HVLD модуль на примере PIC24FJ128GA204Views: 757 HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что … Простой цифровой милливольтметр постоянного токаViews: 4166 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля …
Простой цифровой милливольтметр постоянного токаViews: 4166 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля … AD9833 – Programmable Waveform GeneratorViews: 2965 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить …
AD9833 – Programmable Waveform GeneratorViews: 2965 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить …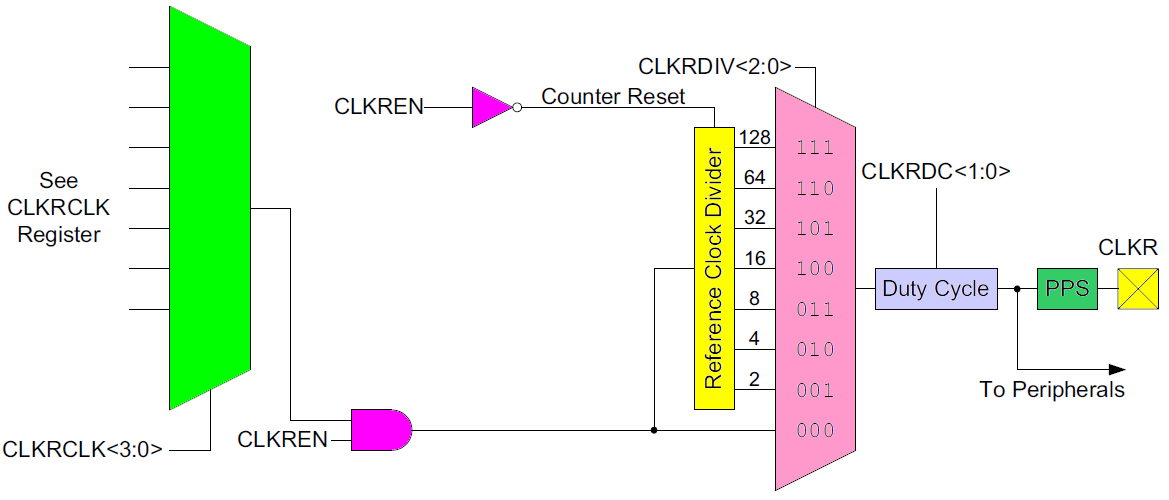 REFERENCE CLOCK OUTPUT MODULEViews: 530 REFERENCE CLOCK OUTPUT MODULE Модуль формирования опорного тактового сигнала Модуль опорного тактового сигнала обеспечивает возможность посылать сигнал синхронизации на тактовый опорный выходной контакт или контакты (CLKR) в зависимости от …
REFERENCE CLOCK OUTPUT MODULEViews: 530 REFERENCE CLOCK OUTPUT MODULE Модуль формирования опорного тактового сигнала Модуль опорного тактового сигнала обеспечивает возможность посылать сигнал синхронизации на тактовый опорный выходной контакт или контакты (CLKR) в зависимости от …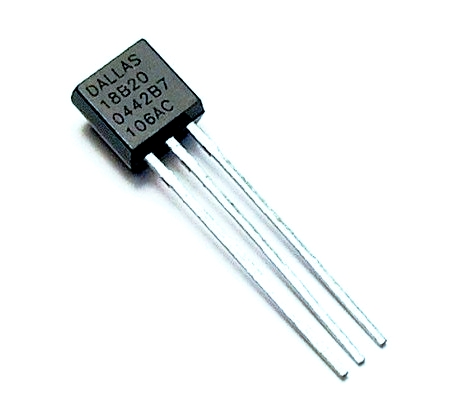 Защита датчиков температуры DS18B20 от статического электричестваViews: 1938 Статья перепечатана с сайта http://svetomuzyka.narod.ru При удалении датчика на большие расстояния возникает опасность наведения импульсов высокого напряжения на кабель, который соединяет датчик с контролером. Если не принимать меры защиты, …
Защита датчиков температуры DS18B20 от статического электричестваViews: 1938 Статья перепечатана с сайта http://svetomuzyka.narod.ru При удалении датчика на большие расстояния возникает опасность наведения импульсов высокого напряжения на кабель, который соединяет датчик с контролером. Если не принимать меры защиты, … CCP – модуль в режиме Compare на примере PIC18Views: 3154 CCP – модуль можно использовать в трех режимах: Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями. Compare – позволяет …
CCP – модуль в режиме Compare на примере PIC18Views: 3154 CCP – модуль можно использовать в трех режимах: Capture – позволяет захватывать входной сигнал и определять его параметры (длительность или частоту). Дополнительно управлять внутренними модулями. Compare – позволяет … Сенсорный выключатель светаViews: 13876 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида …
Сенсорный выключатель светаViews: 13876 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида … Униполярный шаговый двигатель – часть 2Views: 925 В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима. В …
Униполярный шаговый двигатель – часть 2Views: 925 В этой части только итог и версия 2.0 универсальной, которая позволяет управлять шаговым двигателем во всех трех режимах и 3.0 специальной библиотеки только для одного полушагового режима. В … Проект с использованием MCC часть 08Views: 1203 И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, …
Проект с использованием MCC часть 08Views: 1203 И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, … Проект с использованием MCC часть 12-2Views: 1126 Настало время для изучения шины I2C. Изучать будем на примере работы с индикатором RET012864E. Что изменили со старой схемы: В прошлой теме я затупил и не добавил подтягивающие резисторы …
Проект с использованием MCC часть 12-2Views: 1126 Настало время для изучения шины I2C. Изучать будем на примере работы с индикатором RET012864E. Что изменили со старой схемы: В прошлой теме я затупил и не добавил подтягивающие резисторы …