
Views: 2479

В приводах различных устройств часто применяются шаговые двигатели, Шаговый двигатели различают двух типов униполярные – когда обмотки коммутируются током текущим только в одну сторону, например при помощи обычных транзисторных ключей и биполярные когда для управления шаговым двигателем необходимо направление тока в обмотках менять на противоположное. Биполярные двигатели требуют специальных драйверов и управление в этом случае сводить к двум сигналам направление и количество шагов. Но применение драйверов иногда резко удорожает конструкцию изделия. Для удешевления проще использовать униполярные шаговые двигатели и применить возможности самого микроконтроллера, для силовых ключей можно использовать недорогие сборки типа ULN2003.
Классическая схема шагового двигателя
 Принцип управления 4 обмоточного шагового двигателя заключается в коммутации обмоток двигателя. В инете я нашел три варианта
Принцип управления 4 обмоточного шагового двигателя заключается в коммутации обмоток двигателя. В инете я нашел три варианта
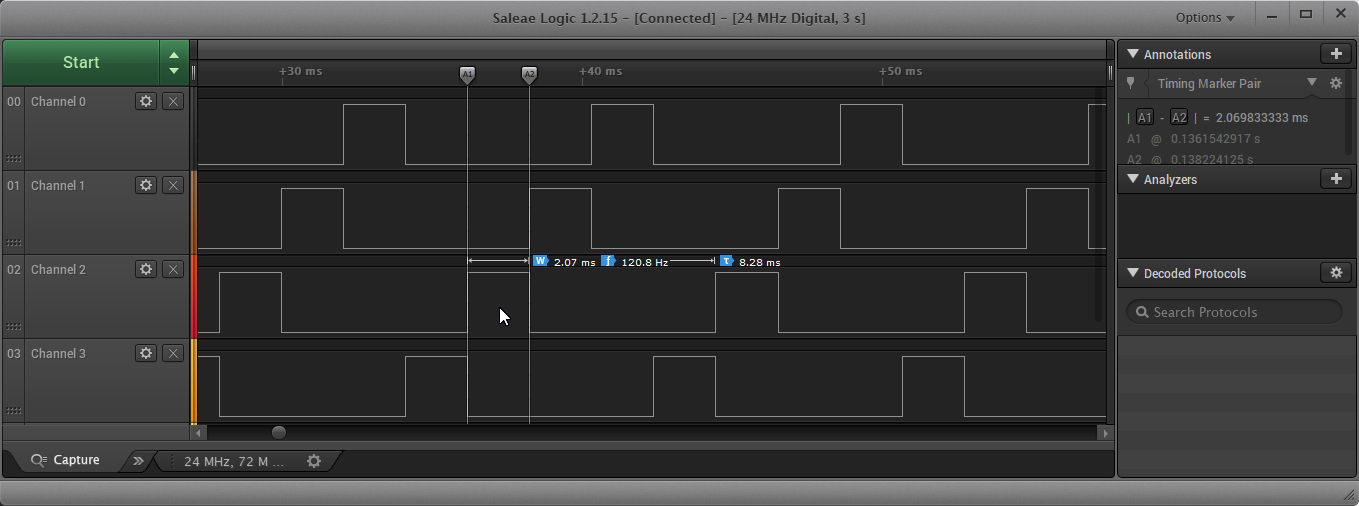
- one phase on – управление запиткой по одной фазе. В этом варианте мы получим самый экономичный режим работв, но и саму малую мощность.
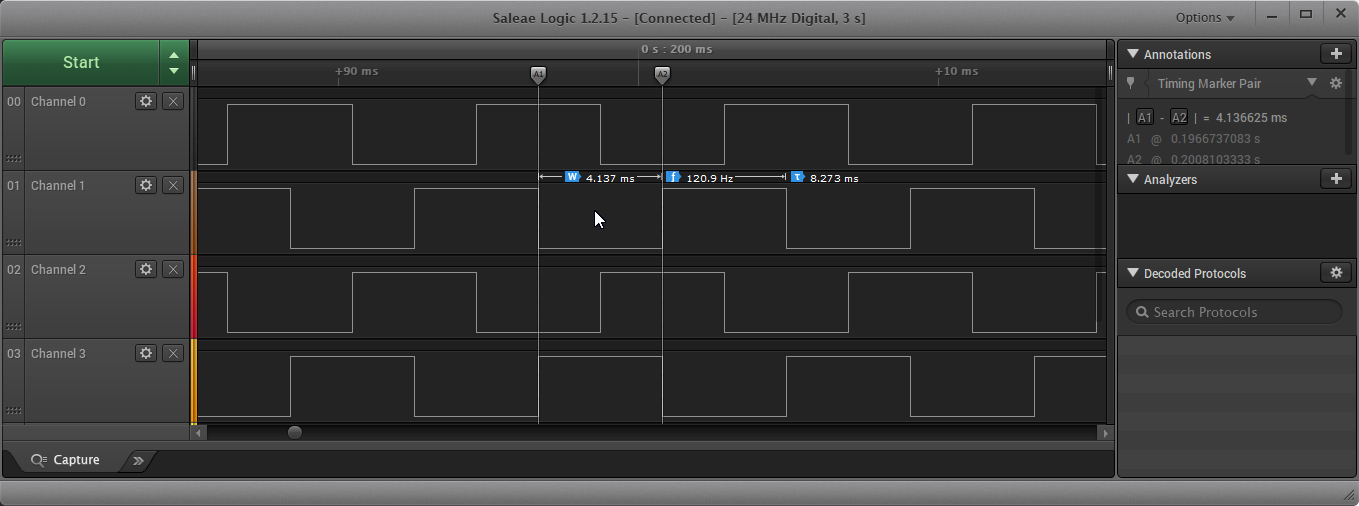
- two phase on – управление запиткой двух обмоток сразу в это варианте потребление увеличивается в два раза соответственно и мощность вращения ротора, по оценкам на 40-50%.
- one and two phase on – это полушаговый режим работы, в принципе комбинация первого и второго метода.
Механизм управления обмотками
one phase on
two phase on
one and two phase on
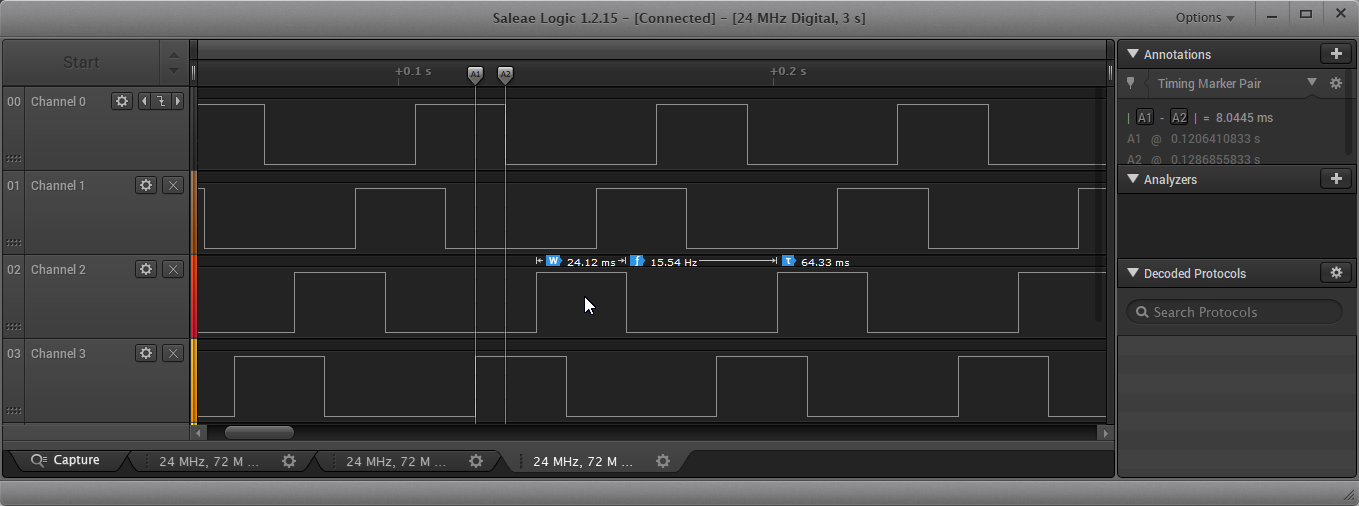
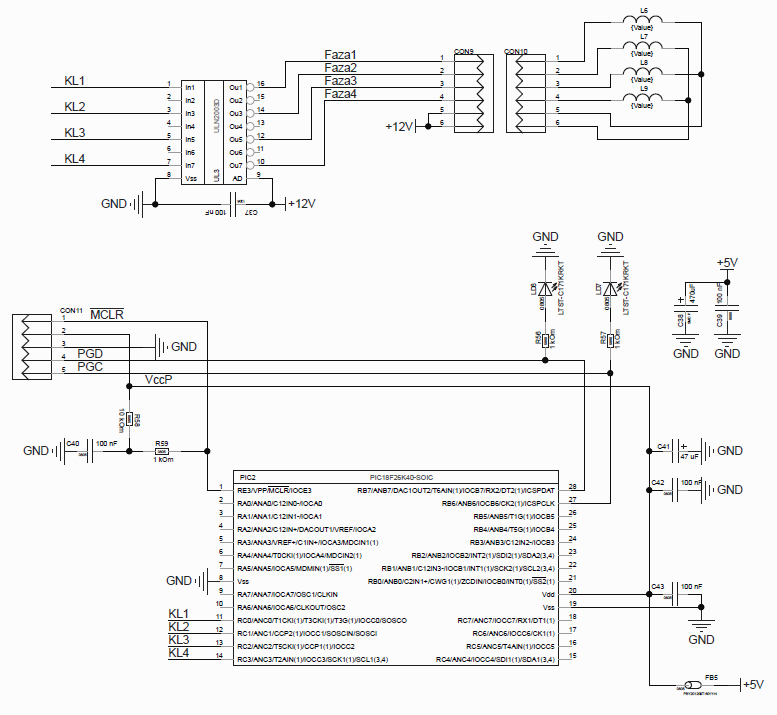
Схема подключения для тестирования
Функция управления в режимах one phase on и two-phase-on
Управление шаговым двигателем возложено на таймер 2, он занимается всем процессом. Управление производиться с использование механизма прерываний, это важно, нам надо сделать такую функцию, чтобы управление работой шагового двигателя не влияло на работу основной программы или имело минимальное влияние.
Я показываю, этот проект на 8 битном контроллере, что можно было понять, что при правильной организации работы, 8-битка PIC справляется с управление на уровне 32 битных микроконтроллеров других производителей.
Вспомогательные функции
Задание скорости перемещения шагового двигателя
void speed (uint8_t speedstep)
{
if(speedstep<25)T2PR=25;
else T2PR=speedstep;
}
Режим работы
void restep (bool regimstep)
{
if(regimstep) uprlfaz=3; // регистр управления фазами
else uprlfaz=1; // регистр управления фазами
}
Основная функция управления
Запуск двигателя, направление и количество шагов
void steping (bool directionF, uint16_t stepF)
{
// загрузка во внешние переменные
if(stepF)
{
steps = stepF;
direction = directionF;
// запуск шагового
T2TMR = 0x00;
PIR4bits.TMR2IF =0;
PIE4bits.TMR2IE = 1;
}
}
Принцип работы, мы задаем количество шагов, направление и включаем прерывание от таймера Т2. Все остальное происходит автоматически. Для контроля выполнения позиционирования ШД, можно использовать сброс разрешения прерываний для таймера T2.
Если использовать МСС для конфигурации, то функцию прерываний от T2 надо модернизировать следующим образом:
void TMR2_ISR(void)
{
uint8_t maska;
//------------------------------------------------------------------------------
maska = (uint8_t)(LATC&0xF0); // загрузить текущее значение регистра и очистить биты для шагового
if(!steps)
{
LATC = maska; //
PIE4bits.TMR2IE = 0;
}
else
{
LATC = (uint8_t)(uprlfaz|maska); // загрузить текущее значение для управления шаговым двигателем
if(direction) // направление вращения
{
uprlfaz=(uint8_t)((uprlfaz >> 1) | (uprlfaz << 3));
}
else
{
uprlfaz=(uint8_t)((uprlfaz << 1) | (uprlfaz >> 3));
}
uprlfaz=(uint8_t)(uprlfaz&0x0F); // очистить "лишнии биты"
//------------------------------------------------------------------------------
steps--; // уменьшить шаг
}
//------------------------------------------------------------------------------
// clear the TMR2 interrupt flag
PIR4bits.TMR2IF = 0;
if(TMR2_InterruptHandler)
{
TMR2_InterruptHandler();
}
}
Что происходит во время прерывания? Программы в прерываниях должны выполняться с максимальной скорость, т.е. быть минимальной длины. Чтобы не мешать выполнять основное задание. В нашем случае задача состоит в том. что-бы во время прерывание изменить состояние порта и закончить прерывание. И это всё. Если мы будем переключать порт по битам, это будет долго, единственный вариант выполнить запись в порт сразу.
Мы считываем состояние порта (в нашем случае порт С) это необходимо, когда мы будем выполнять управление шаговым двигателем, надо не забывать, что двигатель использует, только часть выводов порта, а другую, часть надо оставлять не тронутой. Вот по этому мы считывает текущее состояние с очисткой бито шагового двигателя, затем суммируем с переменной которая определяет следующее положение ротора и загружаем в порт (Если количество шагов не равно нулю), далее в зависимости от бита направление делаем вращение битов в нашей перемененной подготавливая данные для следующего прерывания. Дополнительно корректируем нашу перемененную, т.к. сдвиг может изменить не только “рабочие” битв, но и “сторонние”. И последнее уменьшаем количество заданных шагов.
Пример тестовой программы для управления шаговым двигателем.
void main(void)
{
CLRWDT(); // сброс сторожевого таймера
// Initialize the device
SYSTEM_Initialize();
// If using interrupts in PIC18 High/Low Priority Mode you need to enable the Global High and Low Interrupts
// If using interrupts in PIC Mid-Range Compatibility Mode you need to enable the Global and Peripheral Interrupts
// Use the following macros to:
// Enable high priority global interrupts
//INTERRUPT_GlobalInterruptHighEnable();
// Enable low priority global interrupts.
//INTERRUPT_GlobalInterruptLowEnable();
// Disable high priority global interrupts
//INTERRUPT_GlobalInterruptHighDisable();
// Disable low priority global interrupts.
//INTERRUPT_GlobalInterruptLowDisable();
// Enable the Global Interrupts
INTERRUPT_GlobalInterruptEnable();
// Disable the Global Interrupts
//INTERRUPT_GlobalInterruptDisable();
// Enable the Peripheral Interrupts
INTERRUPT_PeripheralInterruptEnable();
// Disable the Peripheral Interrupts
//INTERRUPT_PeripheralInterruptDisable();
//------------------------------------------------------------------------------
CLRWDT(); // сброс сторожевого таймера
bool nop; // флаг управления направлением
// Настройка
// задание скорости
speed (25);
// задание режима работы по фазам
restep (one_phase_on); // малая мощность
// restep (two_phase_on); // большая мощность
// работа
// запуск шагового двигателя
steping (forward, 800); //
CLRWDT(); // сброс сторожевого таймера
while(PIE4bits.TMR2IE); // ожидать окончания вращения шагового
steping (backward, 400); //
//------------------------------------------------------------------------------
while (1)
{
CLRWDT(); // сброс сторожевого таймера
// Add your application code
// вращяем вперед, назад на 50 шагов
if(!PIE4bits.TMR2IE) // ждем окончания выполнения команды
{
if(nop)
{
nop=0;
steping (backward, 50); // назад на 50 шагов
}
else
{
nop=1;
steping (forward, 50); // вперед на 50 шагов
}
}
}
}
/**
End of File
*/
Перед началом работы надо задать режим работы one phase on и two-phase-on и необходимую скорость вращения. Далее для перемещения двигателя на заданное количество шагов используем функцию steping.
Следует учитывать, что для конкретного шагового двигателя надо определить минимальную длительность которой возможно привести во вращения ротор, это и будет максимальная скорость вращения.
Проект для тестирования
Униполярный шаговый двигатель - проект для тестирования 680.43 KB 11 downloads
В приводах различных устройств часто применяются...Это может быть интересно
 USB K-L-line адаптерViews: 4775 USB K-L-line адаптер предназначен для связи персонального компьютера с диагностической шиной автомобиля – интерфейс ISO-9141. Этот проект предназначен для сборки недорого устройства с использованием специально для этой цели …
USB K-L-line адаптерViews: 4775 USB K-L-line адаптер предназначен для связи персонального компьютера с диагностической шиной автомобиля – интерфейс ISO-9141. Этот проект предназначен для сборки недорого устройства с использованием специально для этой цели … Инфракрасный датчик движения, PIR-sensorViews: 3318 Домашняя автоматика предполагает наличие датчиков движения, которые способны контролировать движения человека. Самым простым и доступным устройством позволяющие контролировать изменения ИК-излучения, это ПИР-сенсоры. На текущий момент доступны не дорогие модели D203B, D204B, D205B. Все …
Инфракрасный датчик движения, PIR-sensorViews: 3318 Домашняя автоматика предполагает наличие датчиков движения, которые способны контролировать движения человека. Самым простым и доступным устройством позволяющие контролировать изменения ИК-излучения, это ПИР-сенсоры. На текущий момент доступны не дорогие модели D203B, D204B, D205B. Все … Проект с использованием MCC часть 09Views: 1071 Эта часть будет посвящена созданию практического проекта управления освещение. Тех задание: Два выхода управления ШИМ – светодиодным освещением. Две кнопки управления, каждая кнопка управляет, своим каналом, логика самая …
Проект с использованием MCC часть 09Views: 1071 Эта часть будет посвящена созданию практического проекта управления освещение. Тех задание: Два выхода управления ШИМ – светодиодным освещением. Две кнопки управления, каждая кнопка управляет, своим каналом, логика самая … Система отопления на солнечных коллекторах от Дмитрия (rv3dpi)Views: 3474 Солнечные коллекторы для отопления в Европе используют в более 50% от общего количества установленных гелиосистем. Однако следует понимать, что гелиосистемы предназначены лишь для поддержки отопления и экономии затрат на основную …
Система отопления на солнечных коллекторах от Дмитрия (rv3dpi)Views: 3474 Солнечные коллекторы для отопления в Европе используют в более 50% от общего количества установленных гелиосистем. Однако следует понимать, что гелиосистемы предназначены лишь для поддержки отопления и экономии затрат на основную … Altium Designer my Libraries, Project templates, System settings by Catcatcat V24.0 PROViews: 554 Назвемо цей варіант поновлення для професіоналів і не тільки. Що нового? 1. Повністю змінено структуру параметрів бази даних компонента. Це дозволило повноцінної роботи Актив ВОМ. Ви відразу отримуєте …
Altium Designer my Libraries, Project templates, System settings by Catcatcat V24.0 PROViews: 554 Назвемо цей варіант поновлення для професіоналів і не тільки. Що нового? 1. Повністю змінено структуру параметрів бази даних компонента. Це дозволило повноцінної роботи Актив ВОМ. Ви відразу отримуєте … Electronic Speed Controller for FPV droneViews: 57 Другий проект цієї серії, це контролер швидкості або контролер управління BLCD мотором. Для аналізу було вибрано плату SpeedyBee BLS 55A 4-in-1 ESC із комплекту SpeedyBee F405 V4 BLS …
Electronic Speed Controller for FPV droneViews: 57 Другий проект цієї серії, це контролер швидкості або контролер управління BLCD мотором. Для аналізу було вибрано плату SpeedyBee BLS 55A 4-in-1 ESC із комплекту SpeedyBee F405 V4 BLS … LCD драйвер – UC1601sViews: 1836 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG.
LCD драйвер – UC1601sViews: 1836 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG. HVLD модуль на примере PIC24FJ128GA204Views: 878 HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что …
HVLD модуль на примере PIC24FJ128GA204Views: 878 HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что … Проект с использованием MCC часть 08Views: 1326 И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, …
Проект с использованием MCC часть 08Views: 1326 И так создадим проект в котором при помощи двух кнопок мы сможем управлять яркостью светодиодов. При использовании МСС у нас лафа полная, добрые дяди с Microchipa подготовили функции, … Акриловый корпус для платы ch-4000Views: 872 Плата ch-4000 подходит для монтажа в корпуса на дин рейку, но для домашней автоматики необходимо что-то другое, поэтому был разработан корпус из акрила который позволит создавать настольные и настенные устройства. Корпус …
Акриловый корпус для платы ch-4000Views: 872 Плата ch-4000 подходит для монтажа в корпуса на дин рейку, но для домашней автоматики необходимо что-то другое, поэтому был разработан корпус из акрила который позволит создавать настольные и настенные устройства. Корпус …