Views: 5889 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований CAN 2.0B от 1991 года. Область применения CAN протокола: от высокоскоростных сетей связи до замены жгутов электропроводов в автомобиле. Высокая скорость передачи данных (до …
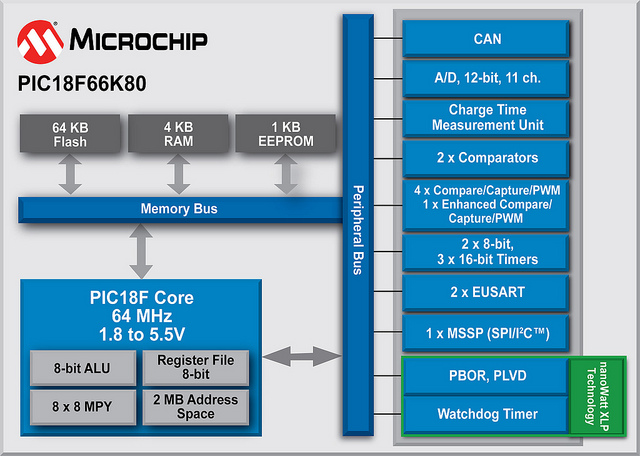
Читать далее Модуль CAN в микроконтроллерах PIC18