Views: 2969
Изучаем изготовление емкостных сенсоров на PIC-микроконтроллере.
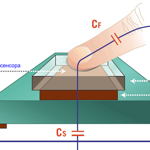
Конструкция емкостных сенсоров имеет вид: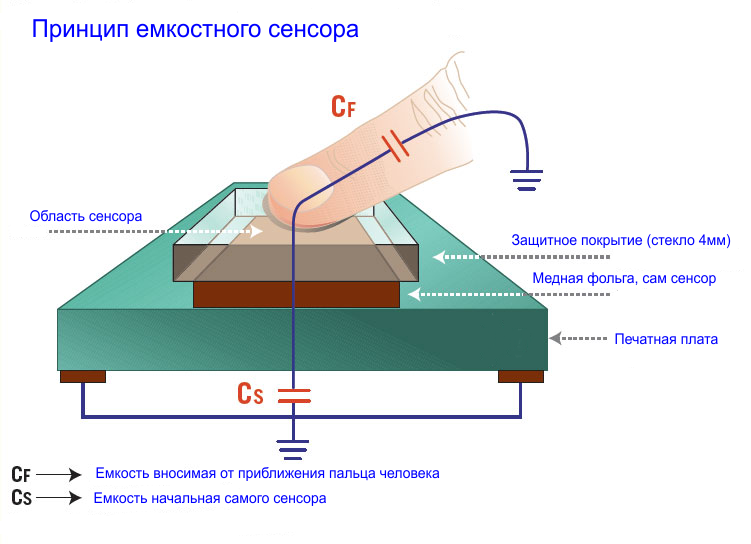
Емкостные сенсоры строятся по схеме высокочастотного генератора, сам принцип основан на измерение частоты этого генератора. Частота зависит от емкости подключенной к управляющему входу.
Блок схема
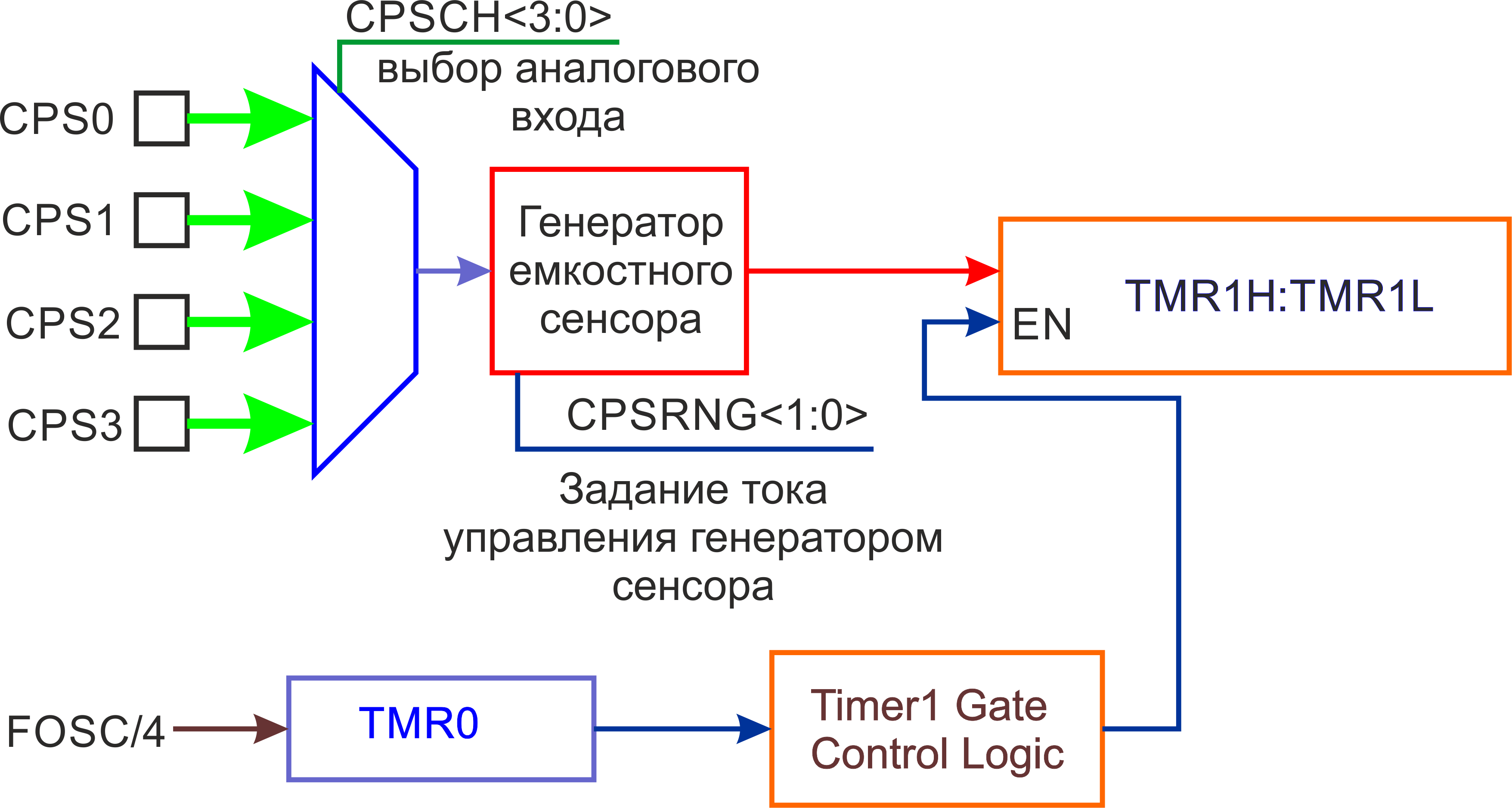
В контроллерах последних разработок имеется модуль Timer1 Gate Control Logic который может полностью автоматизировать функции измерения частоты или длительности импульса. Таймером TMR0 задается время измерения. Модуль контроля управляет измерением. Таймер TMR1 используется для измерения частоты.
Принцип работы емкостного сенсора с использование управляемого генератора. Генератор через аналоговый коммутатор подключается к сенсору. В зависимости от пита микроконтроллера доступно разное количество выводов. В зависимости от физических размеров сенсора и окружающего пространства, на выходе будет получена соответствующая частота. Частоту можно регулировать в зависимости от тока который можно задавать в регистре CPSCON0 битами CPSRNG<1:0> в нашем контроллере можно задать ток 01-0,1/10-1,2/11-18 мкА.
Принцип чем больше размер сенсорной площадки или необходима большая чувствительность (без прикосновения) – делаем ток больше, если необходимо уменьшить чувствительность или сенсорная площадка маленькая уменьшаем. Больший ток позволяет увеличивать частоту сенсора, меньший уменьшает. Большая сенсорная площадка соответственно уменьшает частоту и естественно будет уменьшена сама чувствительность сенсора. Маленький сенсор может генерировать очень большую частоту, что может вызывать переполнение таймера который отвечает за измерение частоты.
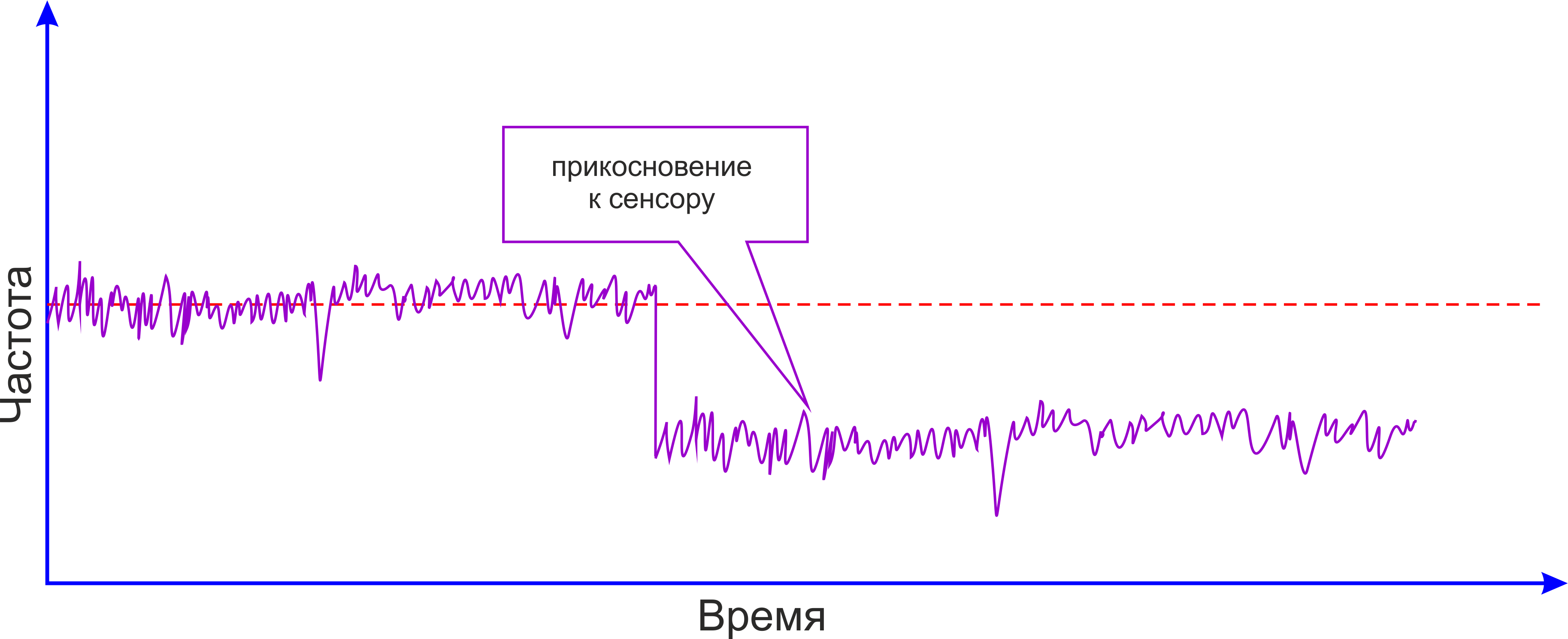
Нужно понимать, что в зависимости от окружающей среды сам генератор не может генерировать, точно определенную частоту, частота может иметь небольшую девиацию. Нам необходимо измерять эту частоту и вычислить среднее её значение.
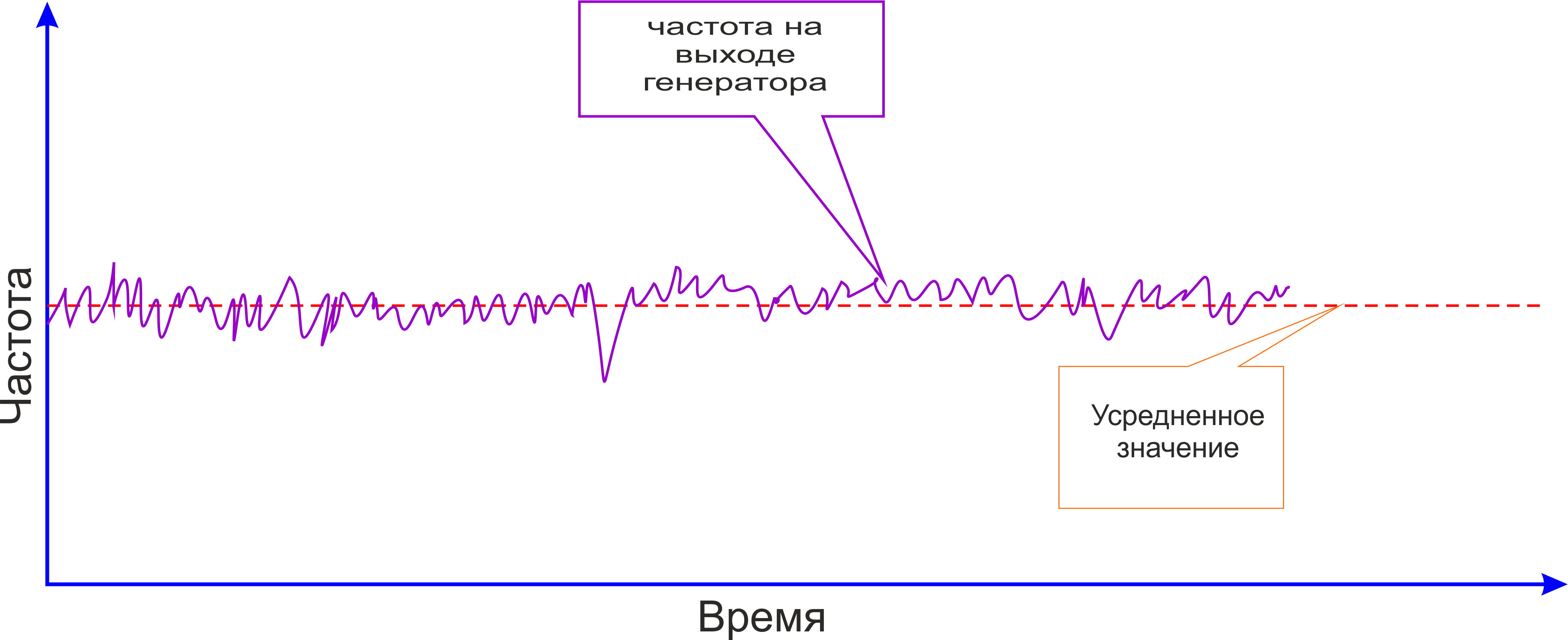
Среднее значение не будет естественно иметь прямой линии, оно будет иметь во времени некоторую кривую которая будет изменяться от окружающей среды. Скорость “подстройки” уровня средней частоты зависит от коэффициента усреднения – который задается в программе. О него будет зависит как быстро сенсор будет выходить в рабочий режим после включения. Но при этом “сглаживание” будет низкое. При этом надо выбирать компромисс.
При прикосновению к сенсору – емкость сенсора увеличивается, при этом частота уменьшается и мы будем иметь следующий вид:
Для определения нажатия сенсора необходимо ввести еще два параметра это ПОРОГ и ГИСТЕРЕЗИС. ПОРОГ предназначен для задания уровня при понижении частоту ниже которого мы будем считать, что сенсор “сработал”: 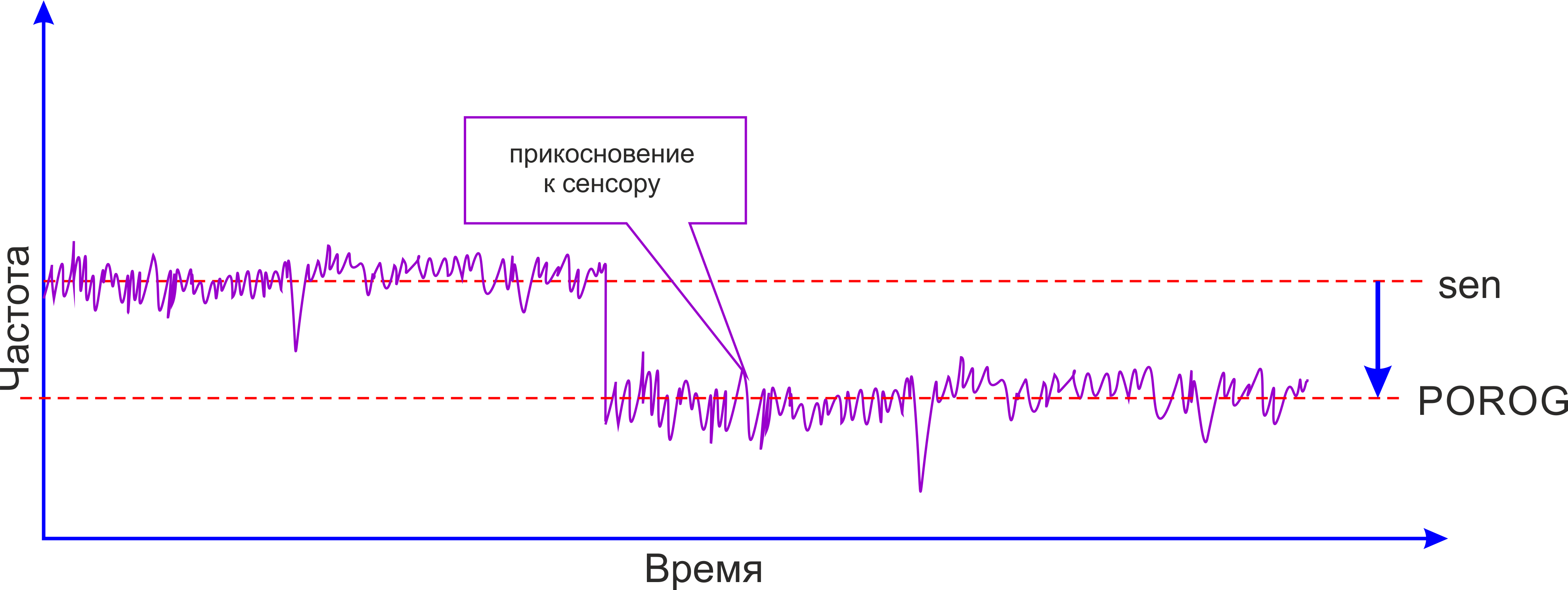 Но просто задать порог недостаточно для уверенного срабатывания сенсора. Необходимо дополнительно ввести гистерезис, что даст возможность ввести режим триггера и формировать на выходе стабильные уровни при касании.
Но просто задать порог недостаточно для уверенного срабатывания сенсора. Необходимо дополнительно ввести гистерезис, что даст возможность ввести режим триггера и формировать на выходе стабильные уровни при касании. 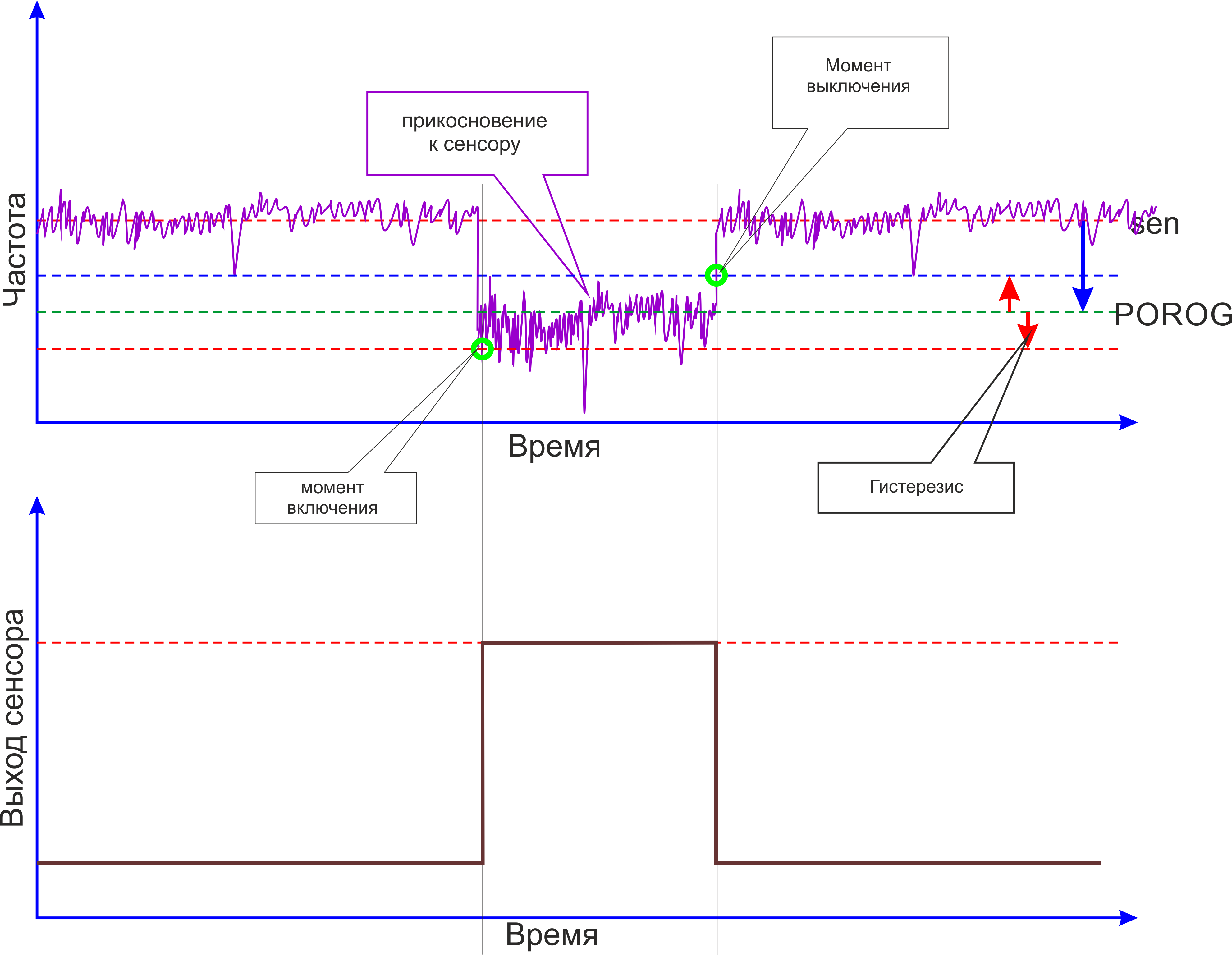 Надеюсь приведенные рисунки поясняют принцип работы емкостного сенсора.
Надеюсь приведенные рисунки поясняют принцип работы емкостного сенсора.
Для начала как настроить микроконтроллер для работы с емкостными сенсорами.
- Для начала выводы к которым должны подключаться сенсора необходимо сделать аналоговыми, например для микроконтроллера PIC16F1826 это необходимо выполнить так (см. схему)
// настройка портов ANSELA = 0b00001111; // для сенсоров настроить как аналоговые входы PORTA = 0; // LATA = 0b00000000; // отключить выход TRISA = 0b00001111; // для сенсоров настроить как аналоговые входы - Настроить таймер T0 для формирования интервалов измерений
OPTION_REG = 0b10000111; // |||||+++- PS<2:0>: - 1 : 64 // ||||+---- PSA: предделитель подключен к модулю Timer0 // |||+----- TMR0SE: счет по фронту 0->1 // ||+------ TMR0CS: синхронизация от (FOSC/4) // |+------- INTEDG: 0 прерывание по входу RB0/INT по заднему фронту // +-------- WPUEN: все подтягивающие резисторы отключены
- Настроить таймер T1 для измерение частоты
// настройка TIMER1 //TMR1CS<1:0> T1CKPS<1:0> T1OSCEN T1SYNC — TMR1ON T1CON = 0b11000101; // |||||| +- TMR1ON | TIMER1 включен // |||||+--- T1SYNC | не синхронизировать входную частоту // ||||+---- T1OSCEN | генератор отключен // ||++----- T1CKPS | предделитель 1:1 // ++------- TMR1CS | таймер подключен к CAPOSC //R/W-0/u R/W-0/u R/W-0/u R/W-0/u R/W/HC-0/u R-x/x R/W-0/u R/W-0/u // настройка логического элемента таймера TIMER1 //TMR1GE T1GPOL T1GTM T1GSPM T1GGO/DONE T1GVAL T1GSS<1:0> T1GCON = 0b11110001; // ||||||++- T1GSS | выбор входа управления (управляется переполнением от таймера Т0) // |||||+--- T1GVAL | индикатор выхода логического элемента // ||||+---- T1GGO/DONE | бит состояния и управления моноимпульсного формирователя (1-активация ожидания им перепада) // |||+----- T1GSPM | режим синхронизации (одним импульсом отключен) // ||+------ T1GTM | триггер переключателя включен, управляется входным сигналом переключается по каждому положит перепаду // |+------- T1GPOL | Бит полярности. Модуль активируется высоким уровнем "1" // +-------- TMR1GE | Логический модуль включен - Настроить генератор сенсоров
// настройка Capacitive Sensing //CPSON CPSRM(1) — — CPSRNG<1:0> CPSOUT T0XCS CPSCON0 = 0b11001100; // |||||||+- T0XCS | вход таймера Т0 не подключен к генератору модуля // ||||||+-- CPSOUT | индикатор направления тока // ||||++--- CPSRNG<1:0> | генератор включен, ток макс (01-0,1/10-1,2/11-18 мкА) // |+++----- | не используется // +-------- CPSON | Capacitive sensing module включен // выбор сенсора //— — — CPSCH<4:0> CPSCON1=0; //подключен к 0 входу. //входы описываются как CPSCH0, CPSCH1, CPSCH2, CPSCH3 -
Для работы сенсора мы должны определить базовое значение sen – это та частота которую генерирует сенсор когда нет прикосновение. Как это сделать? Естественно мы не будем её измерять, так как она может измениться от состояния внешней среды, это значение должно постоянно корректироваться во время работы сенсора. Для этого мы будем измерять текшую частоту сенсора и вычислять среднее значение. Для того, чтобы не путаться и не “растрачивать” сенсор, в момент прикосновения подстройка частоты будет блокироваться на необходимое нам время. Я установил 30 секунд. Для чего это необходимо? Я считаю, что для управления устройством, длительность проникновение не должна превышать 30 секунд (чаще достаточно долей секунды). Если состояние сенсора “включено” будет не более 30 секунд, то он будет работать как обычно, но если прикосновение будет выше 30 секунд, то это будет расценено как изменение внешних условий и автоматически уровень “выключено” перестроиться под создавшиеся условия. Для такого режима работы у нас не будет “болеть голова” если необходимо будет использовать сенсоры с разными характеристиками. Сама программа автоматически правильно настроить его работу. Основанной функцией есть программа вычисление среднего значения. Она работает следующим образом. Имеются старое и новое значение параметра. При получении нового значения из старого вычитается процент от его величины и изменяется старое значение. Из нового значения извлекается такой же процент и прибавляется к старому значению.
//====================================================================================== // subroutine: среднее число // входные данные staroe - старое значение переменой, // novoe - новое измеряемое значение // старое значение уменьшается на коэффициент INTEG // а затем увеличивается на величину нового/INTEG unsigned int averageg (unsigned int staroe, unsigned int novoe) { staroe=staroe-staroe/INTEG; staroe=staroe+novoe/INTEG; return staroe; }// - Все остальное просто дело логики. Вкратце измеряем частоты формируемые каждым сенсором, записываем их в массив. Обрабатываем и получаем уровни состояния отключено (более подробно смотри программу).
- Следующие два параметра это ПОРОГ и ГИСТЕРЕЗИС они естественно подбираются из практики, но никогда не вызывают проблем. Порог это величина изменения частоты ниже которого порога сенсор расценивает, что осуществилось прикосновение. Гистерезис это та величина которая необходима для стабильности переключения. Главная особенность ГИСТЕРЕЗИС < ПОРОГ. На практике в два, четыре раза меньше. Порог это чувствительность сенсора чем меньше порог тем выше его чувствительность, можно так настроить, что сенсор будет срабатывать не от прикосновения, а от приближения руки. Гистерезис это параметр устраняющий неопределенность, если при прикосновении сенсор ведет себя нестабильность, то его надо увеличить. Вот И вся примостить. В примере для тестирования для режима “объемного контроля” выбрана величина Порог – 30, гистерезис 5. Смотрите демонстрационное видео, размеры сенсоров выбраны большими специально для демонстрации возможности программы подстроиться от даже такой вариант. Режим работы для бесконтактного управления, очень удобен когда нет необходимости к чему-то прикасаться.
- Демонстрация режима без прикосновения.
- Перевести в режим прикосновения можно двумя способами: это уменьшить рабочий ток генератора или увеличить порог. Все эти параметры необходимо подбирать отдельно для конкретной конструкции. Ниже вариант видео для значения порога 200. т.е. диапазон чувствительности очень вели у может удовлетворить любые запросы. По толщине пластика можно не “заморачиваться”, сенсоры могут работать через довольно большие толщины, тестировались до 20 мм, все нормально работало. В видео акрил толщиной 3 мм.
- Режим на прикосновение.
- ОБРАТИТЕ ВНИМАНИЕ программе надо несколько секунд после включения для настройки сенсоров.
- Мы уже описали два два режима работы сенсора, без прикосновения и с прикосновением, эти режимы отличаться только настройкой чувствительности. Но возможно в программах потребуется режим когда будет необходимо получить не только состояние “вкл/выкл”, но и данные от расстояния до сенсора. Этот вариант, так же возможен при реализации такого рода сенсоров.
- Для демонстрации приведем проект сенсор который может определять направление ускорения с каким мы прикасаемся к нему. При помощи такого сенсора можно формировать команды в зависимости от того как вы к нему прикасаетесь.
- Видео контроль скорости приближения.
Все эксперименты проводились на следующей схеме:
Схема для изучения 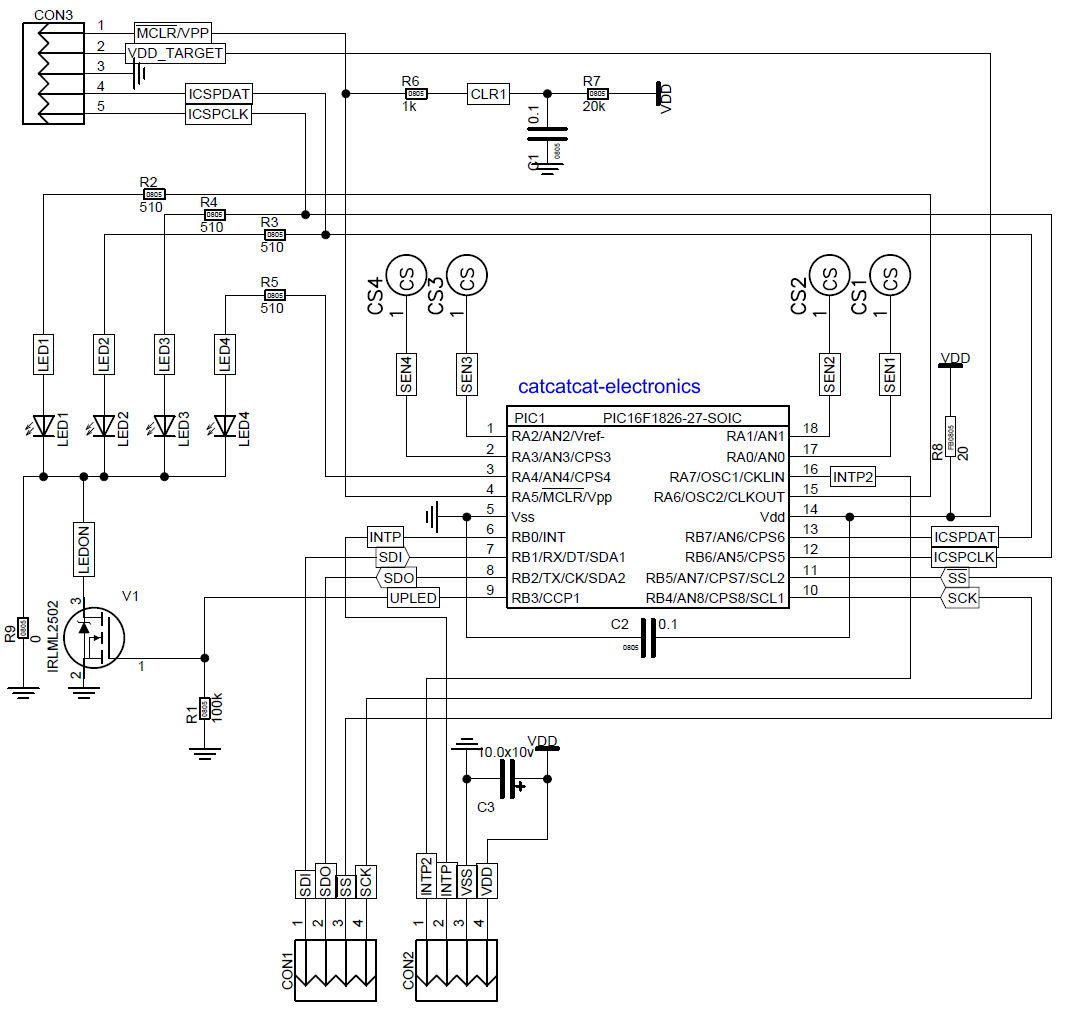
Удачного творчества! проект легко перенести на другой тип контроллера.
Проект MPLABX v2.00, компилятор MPLAB® XC8 Compiler v1.30 [wpdm_file id=270 template=”link-template-calltoaction3.php”]Проект фокус с измерения контроль скорости приближения [wpdm_file id=271 template=”link-template-calltoaction3.php”]
Это может быть интересно
 ch-4000 – универсальная печатная платаViews: 996 На смену устаревшей плате ch-3000, пришла новая ch-4000. Плату уже можно приобрести в магазине Ворон. Схема. Плата позволяет создавать таймеры, часы реального времени, регуляторы температуры, регуляторы влажности, вольтметры, …
ch-4000 – универсальная печатная платаViews: 996 На смену устаревшей плате ch-3000, пришла новая ch-4000. Плату уже можно приобрести в магазине Ворон. Схема. Плата позволяет создавать таймеры, часы реального времени, регуляторы температуры, регуляторы влажности, вольтметры, … VU Meter Tower ARTViews: 1595 Стерео индикатор уровня аудио сигнала. Компактность и удобство проектирования устройств на светодиодах WS2812B, а также легкость реализации алгоритма родило идею созданию своей конструкции. В этом проекте я предоставлю …
VU Meter Tower ARTViews: 1595 Стерео индикатор уровня аудио сигнала. Компактность и удобство проектирования устройств на светодиодах WS2812B, а также легкость реализации алгоритма родило идею созданию своей конструкции. В этом проекте я предоставлю … ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 5806 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. …
ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 5806 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. … MPLAB® Harmony – или как это просто! Часть 2.Views: 2661 Часть вторая – Первая программа на PIC32. Музыкальная тема к статье, слушаем: Для начала изучения PIC32 надо иметь или демоплату или самому её изготовить имея микроконтроллер. Начнем из …
MPLAB® Harmony – или как это просто! Часть 2.Views: 2661 Часть вторая – Первая программа на PIC32. Музыкальная тема к статье, слушаем: Для начала изучения PIC32 надо иметь или демоплату или самому её изготовить имея микроконтроллер. Начнем из … AD9833 – Programmable Waveform Generator – part twoViews: 1691 Прошло время и появилась тема, что-бы закончить проект AD9833 – Programmable Waveform Generator. Приехали печатные платы. В этот раз я печатные платы заказывал в https://jlcpcb.com/ делал это в …
AD9833 – Programmable Waveform Generator – part twoViews: 1691 Прошло время и появилась тема, что-бы закончить проект AD9833 – Programmable Waveform Generator. Приехали печатные платы. В этот раз я печатные платы заказывал в https://jlcpcb.com/ делал это в … CLUBBEST-50-LightViews: 233 CLUBBEST-50-LIGHT Зміст Короткий опис проекту. 1 Опис схемотехніки візуалізатора музики. 2 Аудіо вхід. 3 MCU. 4 Цифровий вихід. 5 Схема живлення MCU. 6 Складання пристрою. 7 Список …
CLUBBEST-50-LightViews: 233 CLUBBEST-50-LIGHT Зміст Короткий опис проекту. 1 Опис схемотехніки візуалізатора музики. 2 Аудіо вхід. 3 MCU. 4 Цифровий вихід. 5 Схема живлення MCU. 6 Складання пристрою. 7 Список … ch-4050 – дифференциальный терморегуляторViews: 1851 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя …
ch-4050 – дифференциальный терморегуляторViews: 1851 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя … Одноканальный емкостной сенсор – AT42QT1012Views: 2323 Описание сенсора [wpdm_file id=242] Незаконченный проект, так-как сенсор не оправдал своего назначения, не рекомендую, просто выброшенные деньги. Особенности. • Количество сенсоров – один, режим переключения ( touch-on/touch-off ), а также программируемая …
Одноканальный емкостной сенсор – AT42QT1012Views: 2323 Описание сенсора [wpdm_file id=242] Незаконченный проект, так-как сенсор не оправдал своего назначения, не рекомендую, просто выброшенные деньги. Особенности. • Количество сенсоров – один, режим переключения ( touch-on/touch-off ), а также программируемая … MAX7219/21 и 8х8 LED дисплеиViews: 917 MAX7219, MAX7221 предназначены для вывода информации на 8 разрядов семисегментного индикатора, но на нем легко организовать вывод на светодиодные индикаторы 8х8. продолжение следует…. Это может быть интересно
MAX7219/21 и 8х8 LED дисплеиViews: 917 MAX7219, MAX7221 предназначены для вывода информации на 8 разрядов семисегментного индикатора, но на нем легко организовать вывод на светодиодные индикаторы 8х8. продолжение следует…. Это может быть интересно CLUBBEST – reasoning on the visualization of music.Views: 114 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для …
CLUBBEST – reasoning on the visualization of music.Views: 114 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для …