Views: 2292
Учебный проект на PIC32 и светодиодной панели P5 (2121)-168-6432-80 (32*64).
Проект позволяет ознакомиться с простой графикой и с чтением давления и температуры с датчика BMP280.
Для тестирования необходимо собрать следующую схему.
 Схему в формате pdf можно скачать внизу страницы.
Схему в формате pdf можно скачать внизу страницы.
Для тестирования используется модуль приобрести его можно как всегда у китайцев.

Датчик позволяет измерять окружающую температуру и атмосферное давление.
Для разработки будем использовать библиотеку графики от Catcatcat и библиотеку от BOSCH для датчика BMP280. Библиотеку для графики можно скачать внизу статьи, а библиотеку для датчика вот отсюда BoschSensortec/BMP280_driver.
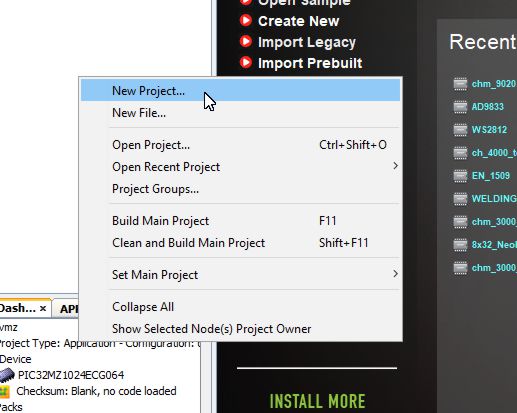
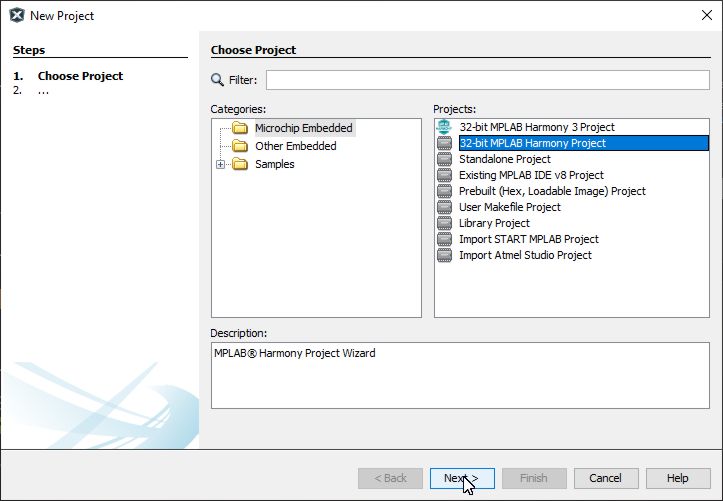
Выберем Harmony проект
Зададим папку проекта и имя проекта.

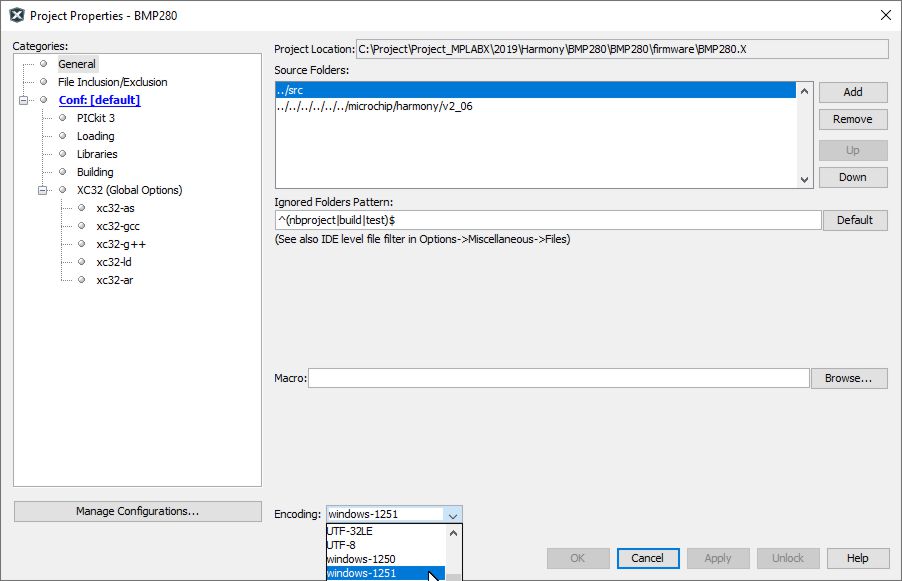
Настроим на наш микроконтроллер и установим кодовую страницу проекта, от которой страницы будут зависит формируемые коды символов.
Кодовая страница.
Настроим выбор микроконтроллера, версию компилятора, тип дебаггера

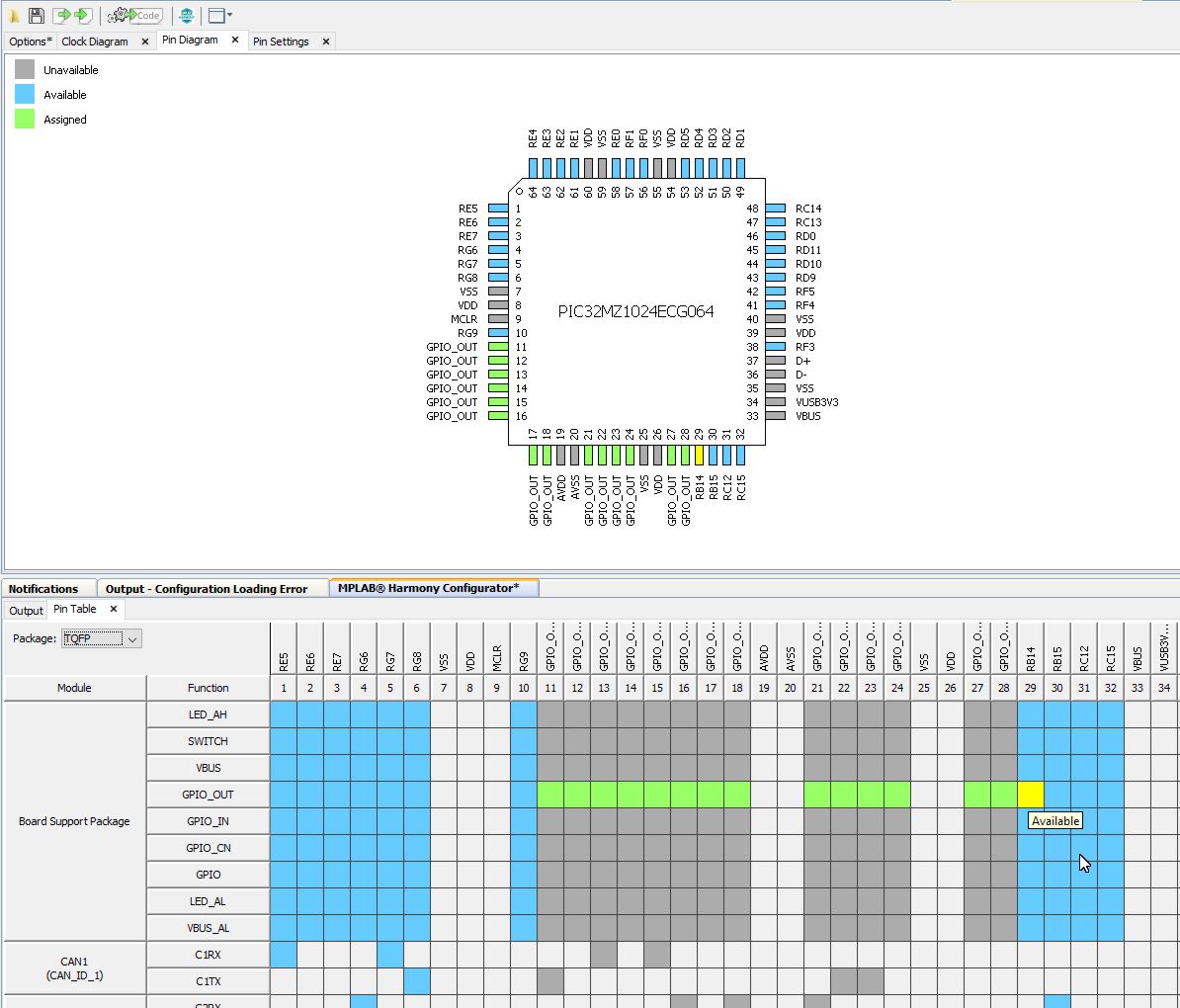
Для работы библиотеки графики для светодиодного модуля необходимо настроить порты микроконтроллера и включить таймер для формирования периода для формирования развертки на дисплее.
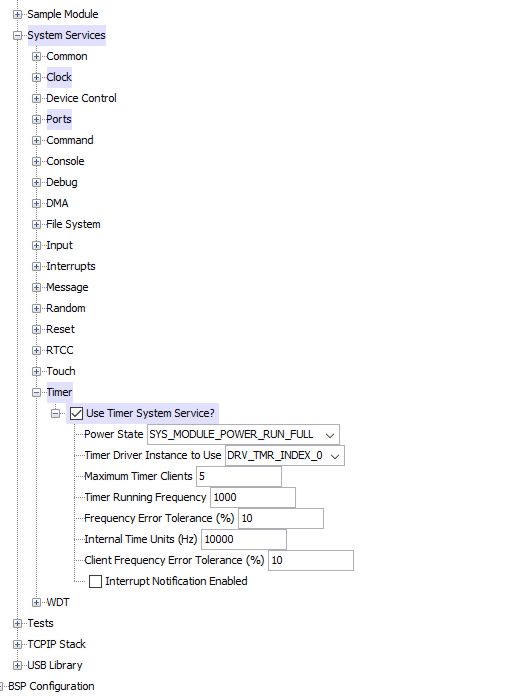
Перейдем в закладки опции и настроим работу таймера. Сначала зайдем в System Services и активируем системный таймер.
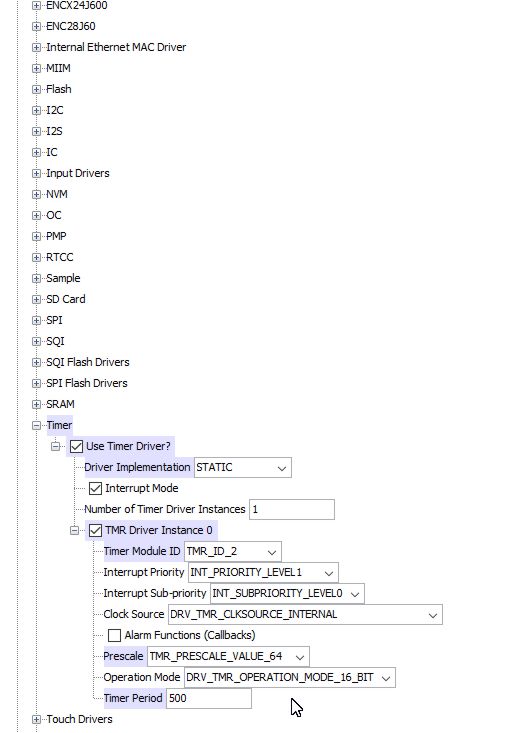
Откроем раздел Драйверы и настроем для управления разверткой дисплея таймер 2. Режим статический, таймер 2, предделитель на 64, период 500.
Запустим генерацию проекта
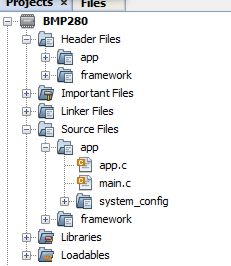
Будут с регенерированы основные файлы проекта.
Следующий этап добавим библиотеку графики для светодиодного модуля. Добавления выполним классическим образом. Нам необходимо взять папку DRIVER_HUB75 содержащую драйвер для формирования изображения на светодиодных модулях, и папку GRAPHICS_HUB75 с функциями графики и добавим в наш проект.
Я это делаю так, в папке проекта, создаю папку с именем ch_lib, вней я храню все свои библиотеки.
В неё добавим наши библиотеки.
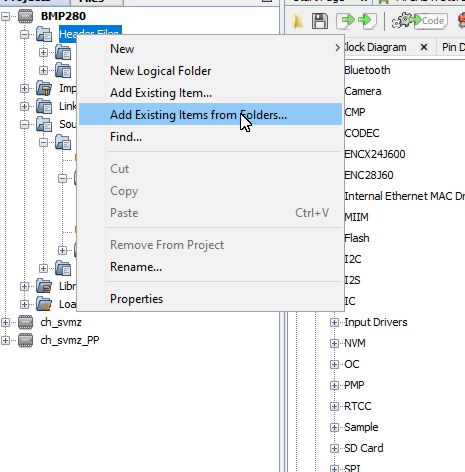
 Теперь подключим библиотеки к нашему проекту. Сначала добавим рабочие файлы.
Теперь подключим библиотеки к нашему проекту. Сначала добавим рабочие файлы.
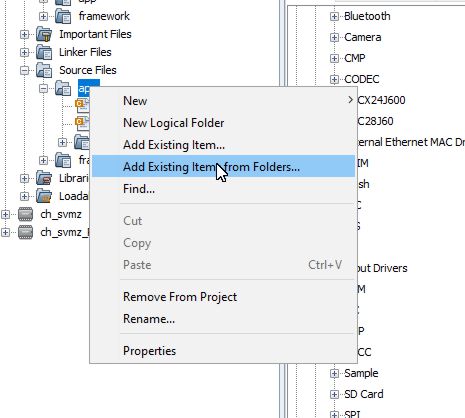
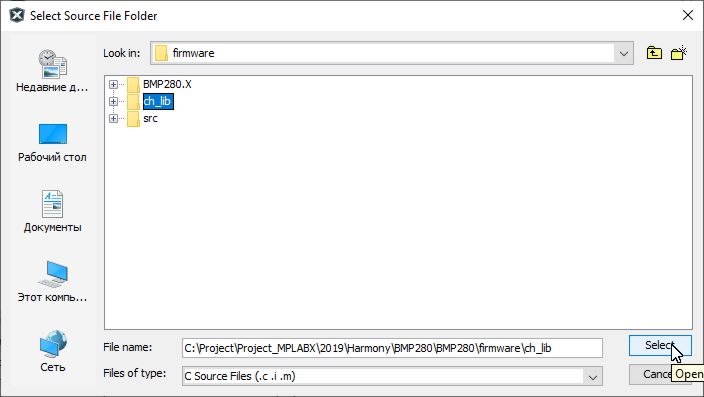
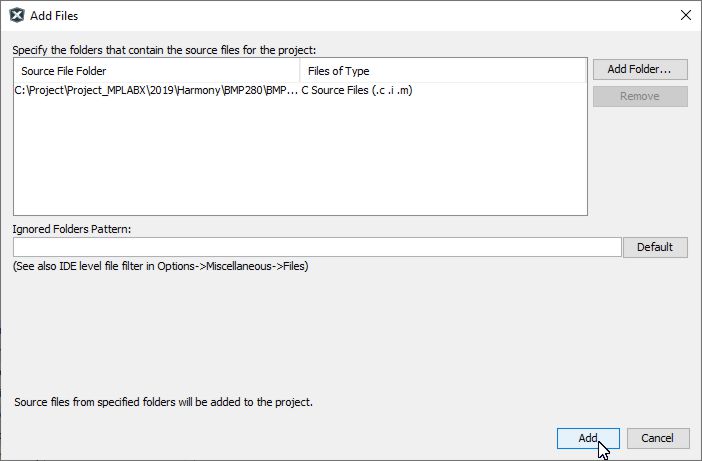
Добавим каталог с нашей библиотекой.

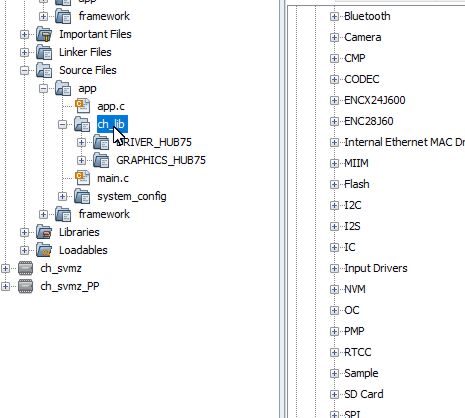
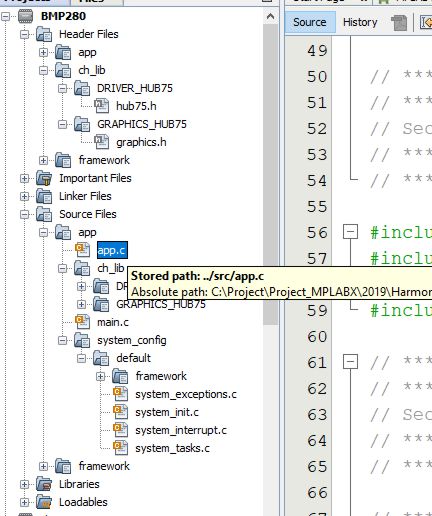
В структуре проекта появиться каталог с библиотеками.
Теперь аналогичным образом добавит заголовки библиотек.
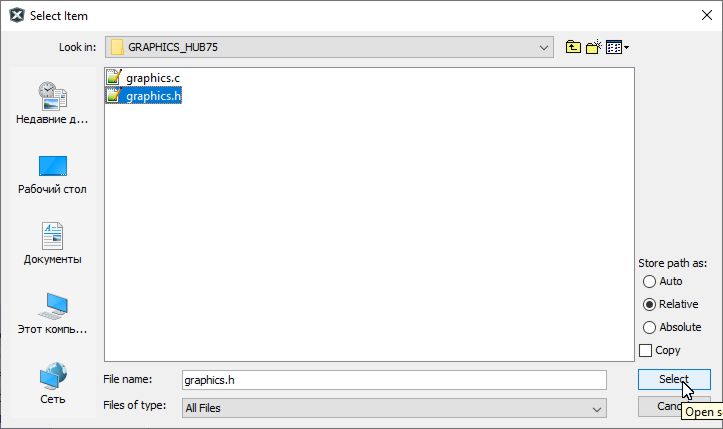
После добавления папки заголовков будут пустые, необходимо дополнительно добавить заголовки каждый в свой каталог.
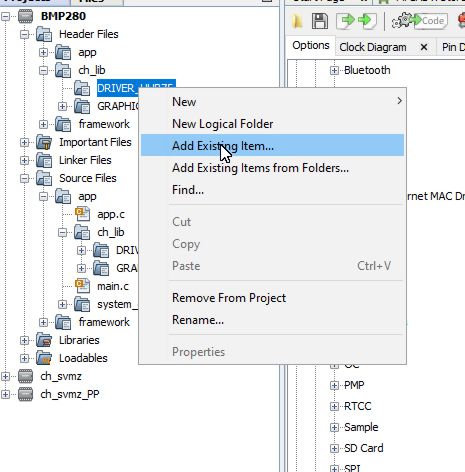
Файл заголовок драйвера.

Файл заголовка графической библиотеки.
Теперь необходимо добавить драйвер в прерывания таймера, откроем файл прерываний.

Добавим в прерывания таймера 2 следующие строки.
void __ISR(_TIMER_2_VECTOR, ipl1AUTO) IntHandlerDrvTmrInstance0(void)
{
Drive_hab75(); // видео драйвер
if(timer_tact1>0)timer_tact1--; // таймер скорости бегущей реки
if(timer_tact2>0)timer_tact2--; //
PLIB_INT_SourceFlagClear(INT_ID_0,INT_SOURCE_TIMER_2);
}
Для подключения достаточно добавить заголовок библиотеки графики, описание на драйвер в ней уже есть.
//------------------------------------------------------------------------------ #include "../ch_lib/GRAPHICS_HUB75/graphics.h" // библиотека графики //------------------------------------------------------------------------------
Теперь можно протестировать вывод изображения на дисплей. Для этого откроем файл app.c.
Добавим заголовок библиотеки графики.
//------------------------------------------------------------------------------ #include "../ch_lib/GRAPHICS_HUB75/graphics.h" //------------------------------------------------------------------------------
И в Функцию void APP_Tasks ( void ) в case APP_STATE_SERVICE_TASKS: бегущую строку с надписью, что даст нам возможность опробовать работу функций вывода изображения на дисплей.
case APP_STATE_SERVICE_TASKS:
{
Scrolling2("Температура и давление, от Catcatcat electronics!", 5, 1, 53, 2, 1, 1, 100, Fuchsia, Black);
break;
}
Загрузим проект и проверим работу графики.
Дополнительно добавим прорисовку прямоугольников, для красоты со случным выводом цвета. Для этого подключим библиотеку stdlib.h для функции rand. И добавим строки.
if(++f>3000000)
{
f=0;
Rectangle( 0, 0, 1, 1, 5, 20, 8, 8, rand()%7, rand()%7);
Rectangle( 0, 0, 1, 1, 15, 20, 8, 8, rand()%7, rand()%7);
Rectangle( 0, 0, 1, 1, 25, 20, 8, 8, rand()%7, rand()%7);
Rectangle( 0, 0, 1, 1, 35, 20, 8, 8, rand()%7, rand()%7);
}
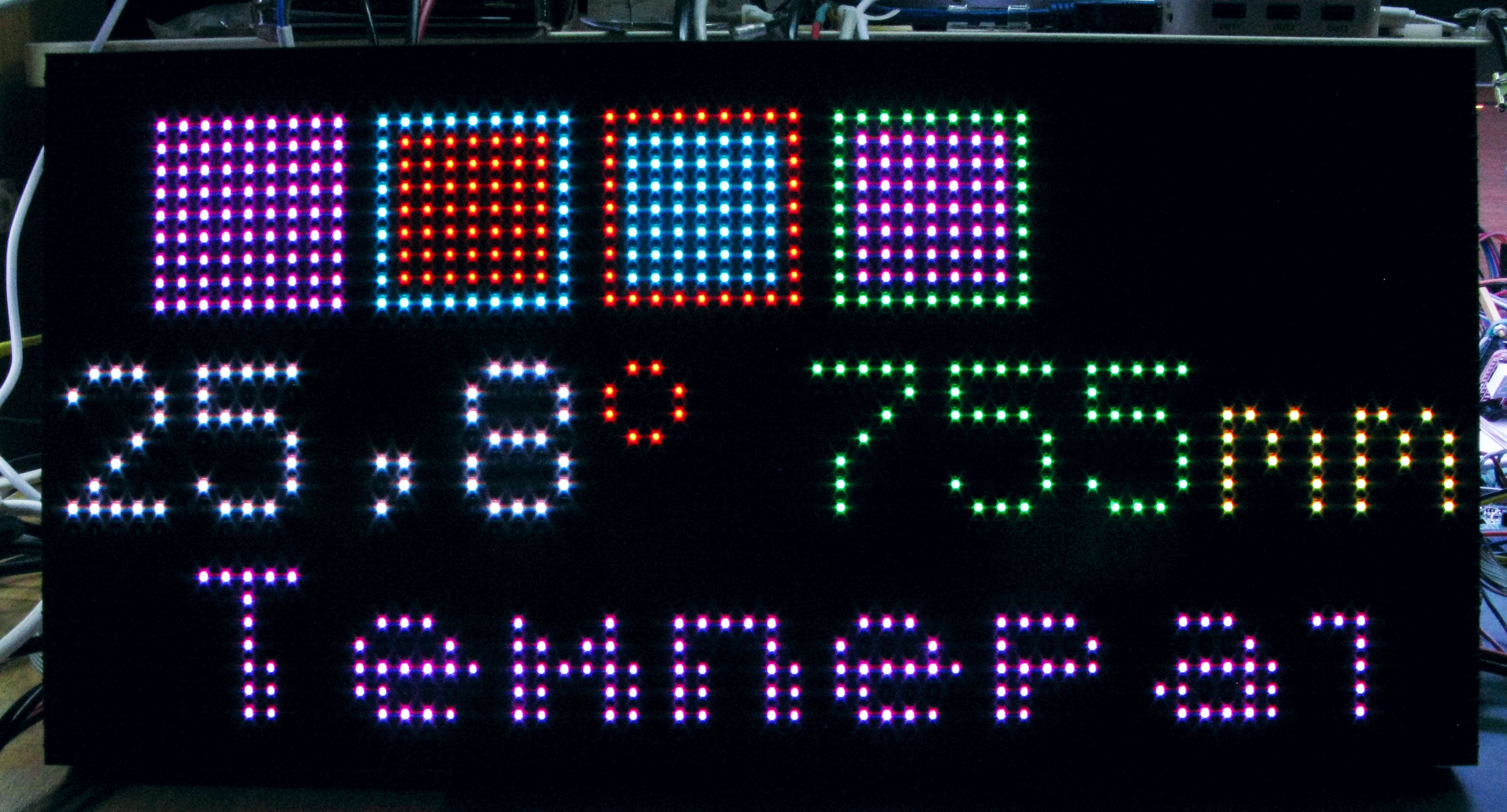
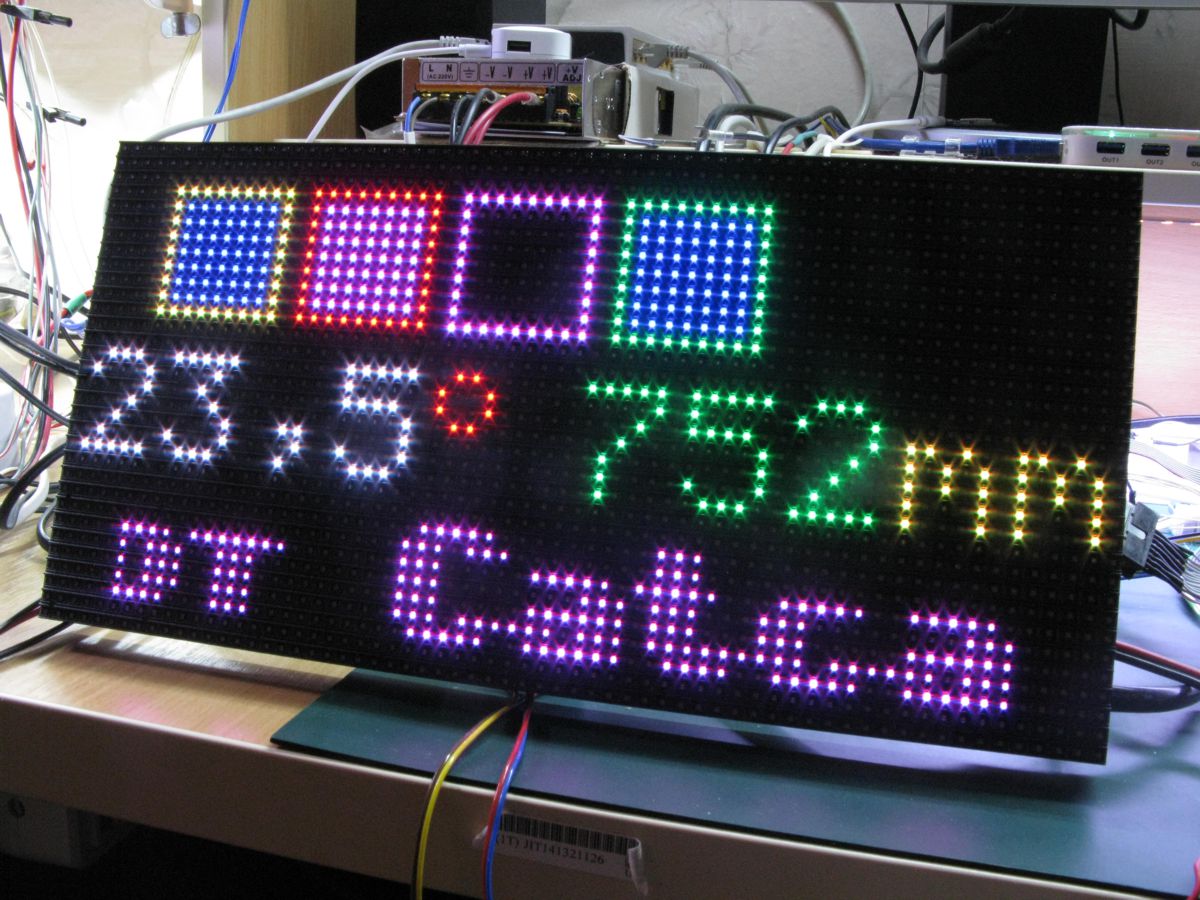
У вас должно быть изображение:

Вверху каждые две секунды 4 квадрата с изменяющимся цветом, внизу бегущая строка.
Для работы с датчиком BMP280 нам необходимо активировать I2C модуль. Для этого перейдем в конфигуратор и настроим порты для пятого модуля I2C.
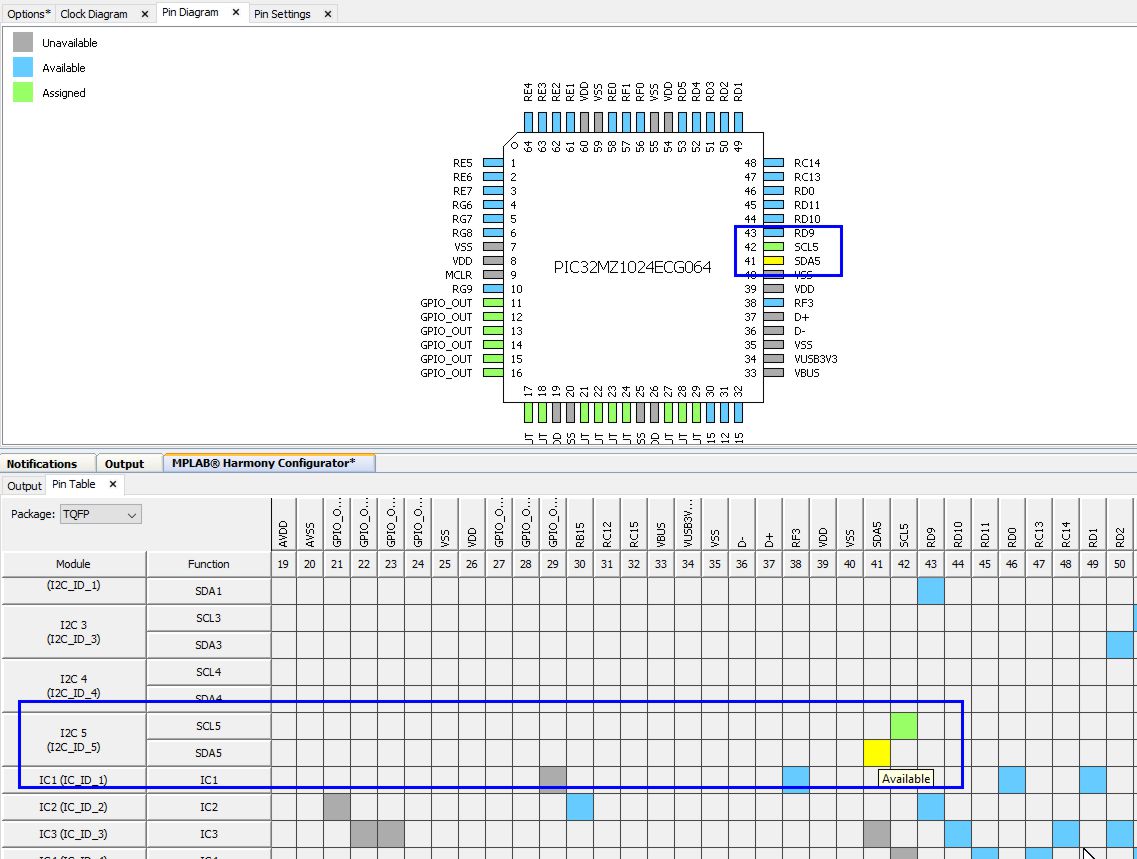
Активируем модуль. Статический режим, модель передача буфера данных, модуль 5 скорость 100 кб.

Выполним генерацию проекта.
Подключим библиотеку от Bosch для датчика BMP280.
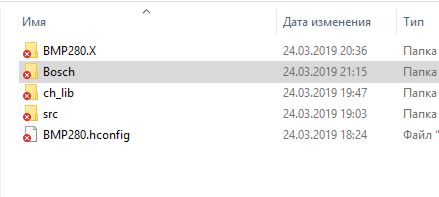
Для этого скачаем файлы как это описано в начале статьи и добавим библиотеку в проект для этого скопируем каталог BMP280, в папку Bosch нашего проекта.
Добавим библиотеку в проект, ка это делалось ранее.
Библиотека требует промежуточных файлов для связи с модулем I2C. Для этого надо создать три функции.
Функция задержки:
void delay_ms(uint32_t period_ms)
{
/* Реализуйте процедуру задержки в соответствии с целевой машиной */
time_delayi = 3*period_ms; // функция задержки 1 ms
while (time_delayi); //
}
Нужна функция записи.
int8_t i2c_reg_write(uint8_t i2c_addr, uint8_t reg_addr, uint8_t *reg_data, uint16_t length)
{
bufer.adress = reg_addr;
memcpy(bufer.bufer,reg_data,length);
DRV_I2C0_Transmit (i2c_addr<<1, &bufer, length+1, 0);
delay_ms(2);
return 0;
}
Для функции записи опишем структуру.
typedef struct
{
uint8_t adress; // адрес старший байт
uint8_t bufer[100]; // буфер данных для передачи
}_bufer; //
И функцию чтения.
int8_t i2c_reg_read(uint8_t i2c_addr, uint8_t reg_addr, uint8_t *reg_data, uint16_t length)
{
static uint8_t reg_addrr;
reg_addrr = reg_addr;
DRV_I2C0_TransmitThenReceive(i2c_addr<<1,®_addrr,1,reg_data,length,0);
delay_ms(2);
return 0;
}
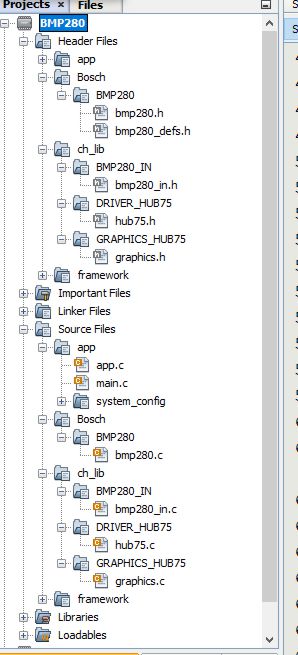
Создадим промежуточную библиотеку, назовем её например bmp280_in. Добавим файлы в проект.
В итоге мы должны получить следующую структуру проекта.
Для запуска работы датчика необходимо в начале выполнить процедуру инициализации, после чего можно считывать данные температуры и давления. Датчик может преобразовывать отдельно температуру и давление или выполнять обо преобразования одновременно, в зависимости от как эффективно и точно необходимо получать данные, могут быть заданы разнообразные режимы работы.
В конце стать есть частичный передо описания датчика, в котором можно более подробно получить описание датчика и его возможности.
Подключим наши библиотеки в файле app.c
#include "../Bosch/BMP280/bmp280.h" // Библиотека Bosch для датчика bmp280 #include "../ch_lib/BMP280_IN/bmp280_in.h" // Связывающие драйвера
Добавим промежуточные переменный и структуры для обработки данных.
struct bmp280_dev bmp; struct bmp280_config conf; struct bmp280_uncomp_data ucomp_data; uint32_t tempI, presI;
А также последовательность инициализации и индикации температуры и давления.
if(!flag)
{
/* Сопоставьте указатель функции задержки с функцией, ответственной за реализацию задержки */
bmp.delay_ms = delay_ms;
/* Присвойте устройству адрес I2C в зависимости от состояния SDO pin (GND for PRIMARY(0x76) & VDD for SECONDARY(0x77)) */
bmp.dev_id = BMP280_I2C_ADDR_PRIM;
/* Выберите режим интерфейса как I2C */
bmp.intf = BMP280_I2C_INTF;
/* Сопоставьте указатель функции чтения и записи I2C с функциями, отвечающими за передачу шины I2C */
bmp.read = i2c_reg_read;
bmp.write = i2c_reg_write;
/*инициализация модуля*/
bmp280_init(&bmp);
/* Обязательное чтение текущих настройк перед записью, особенно когда все настройки не изменены */
bmp280_get_config(&conf, &bmp);
/* настройка передискретизации температуры, коэффициента фильтра и скорости передачи данных на выходе */
/* Коэффициент фильтра*/
conf.filter = BMP280_FILTER_COEFF_2;
/* Передискретизация давления установлена на 4x */
conf.os_pres = BMP280_OS_4X;
/* Передискретизация температуры установлена на 4x */
conf.os_temp = BMP280_OS_4X;
/* Отключение измерения теперературы или давления */
// conf.os_pres = BMP280_OS_NONE;
// conf.os_temp = BMP280_OS_NONE;
/* Установка скорости передачи данных на выходе 1HZ(1000ms) */
conf.odr = BMP280_ODR_1000_MS;
/* Конфигурирование модуля */
bmp280_set_config(&conf, &bmp);
/* Всегда устанавливайте режим питания после настройки конфигурации */
bmp280_set_power_mode(BMP280_NORMAL_MODE, &bmp);
flag=1;
}
/* Чтение необработанных данных с датчика */
bmp280_get_uncomp_data(&ucomp_data, &bmp);
/* Получение компенсированного давления с использованием 32-битной точности */
presI = bmp280_comp_pres_32bit(ucomp_data.uncomp_press, &bmp);
presI = presI*0.00750063755419211;//1 паскаль [Па] = 0,00750063755419211 миллиметр ртутного столба (0°C) [мм рт.ст.]
/* Получение 32-битной скомпенсированной температуры */
tempI = bmp280_comp_temp_32bit(ucomp_data.uncomp_temp, &bmp);
tempI = tempI/10;
/*Индикация параметров*/
Cursor (1, 10);
BinDec(tempI, 2, 0, 3, 1, 1, White, Black);
Symbol(0xBF, 1, 0, 1, 1, Red, Black);
// Symbol('C', 1, 0, 1, 1, White, Black);
Cursor (34, 10);
BinDec(presI, 0, 0, 3, 1, 1, Green, Black);
StringCur("mm", 1, 0, 1, 1, Yellow, Black);
// bmp.delay_ms(1000); /* Время сна между измерениями = BMP280_ODR_1000_MS */
// delay_ms(2000);
}
Дополнительно необходимо подключить в прерывания таймера 2 управление задержкой для функции delay_ms(uint32_t period_ms).
void __ISR(_TIMER_2_VECTOR, ipl1AUTO) IntHandlerDrvTmrInstance0(void)
{
Drive_hab75(); // видео драйвер
if(timer_tact1>0)timer_tact1--; // таймер скорости бегущей реки
if(timer_tact2>0)timer_tact2--; //
if(time_delayi>0) time_delayi--;// фунция задержки для bmp280
PLIB_INT_SourceFlagClear(INT_ID_0,INT_SOURCE_TIMER_2);
}
С компилируем проект и загрузим в микроконтроллер.
В результате получим следующий результат бегущая строка и индикация температуры и атмосферного давления.
Пароль на архив Catcatcat.
BMP280 - учебный проект - проект 465.53 KB 3 downloads
Проект MPLABX, библиотека графики, драйвер для светодиодной...Это может быть интересно
 12-BIT A/D CONVERTER WITH THRESHOLD DETECT на примере PIC24FJ128GA204Views: 965 Введение. 12-битный модуль A/D Converter является усовершенствованной версией 10-битного модуля, предлагаемого на некоторых устройствах PIC24. Оба модуля являются преобразователями, в своих ядрах, с последовательным приближением (SAR), в окружении …
12-BIT A/D CONVERTER WITH THRESHOLD DETECT на примере PIC24FJ128GA204Views: 965 Введение. 12-битный модуль A/D Converter является усовершенствованной версией 10-битного модуля, предлагаемого на некоторых устройствах PIC24. Оба модуля являются преобразователями, в своих ядрах, с последовательным приближением (SAR), в окружении … Простой цифровой милливольтметр постоянного токаViews: 4230 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля …
Простой цифровой милливольтметр постоянного токаViews: 4230 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля … LCD драйвер – UC1601sViews: 1836 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG.
LCD драйвер – UC1601sViews: 1836 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG. Одноканальный емкостной сенсор – AT42QT1012Views: 2496 Описание сенсора [wpdm_file id=242] Незаконченный проект, так-как сенсор не оправдал своего назначения, не рекомендую, просто выброшенные деньги. Особенности. • Количество сенсоров – один, режим переключения ( touch-on/touch-off ), а также программируемая …
Одноканальный емкостной сенсор – AT42QT1012Views: 2496 Описание сенсора [wpdm_file id=242] Незаконченный проект, так-как сенсор не оправдал своего назначения, не рекомендую, просто выброшенные деньги. Особенности. • Количество сенсоров – один, режим переключения ( touch-on/touch-off ), а также программируемая … Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0Views: 304 Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0 Here I want to share how I configure Altium Designer and how I use the DXPPreferences1.DXPPrf …
Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0Views: 304 Altium Designer my Libraries, Project templates, System settings by Catcatcat. V26.0 Here I want to share how I configure Altium Designer and how I use the DXPPreferences1.DXPPrf … Мониторинг температурыViews: 1489 Настоящий проект создан как обучающий с применением библиотек ds18b20 и LCDHD44780 и компилятора Microchip MPLAB XC8 C Compiler V1.12. Если необходимо иметь информацию по состоянию температуры в помещении или в здании, с количеством до 6 точек (16), то …
Мониторинг температурыViews: 1489 Настоящий проект создан как обучающий с применением библиотек ds18b20 и LCDHD44780 и компилятора Microchip MPLAB XC8 C Compiler V1.12. Если необходимо иметь информацию по состоянию температуры в помещении или в здании, с количеством до 6 точек (16), то … Development Boards PIC18F47Q84Views: 8475 Microchip тішить новими мікроконтролерами. Особливістю цього MCU – це багата інтелектуальна периферія, що дозволяє вирішувати такі завдання на 8 бітних MCU, які неможливо реалізувати на деяких навіть 32 …
Development Boards PIC18F47Q84Views: 8475 Microchip тішить новими мікроконтролерами. Особливістю цього MCU – це багата інтелектуальна периферія, що дозволяє вирішувати такі завдання на 8 бітних MCU, які неможливо реалізувати на деяких навіть 32 … The art of DJViews: 261 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is …
The art of DJViews: 261 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is … Сумеречное релеViews: 1672 Реле управления освещением, датчик день-ночь – одним словом фотореле для управления освещением или формирования сигнала для системы умный дом о понижении или повышении освещенности относительно заданного уровня. Реле выполнено по классической схеме, конденсаторный блок питания, от сети переменного тока …
Сумеречное релеViews: 1672 Реле управления освещением, датчик день-ночь – одним словом фотореле для управления освещением или формирования сигнала для системы умный дом о понижении или повышении освещенности относительно заданного уровня. Реле выполнено по классической схеме, конденсаторный блок питания, от сети переменного тока … CLUBBEST – reasoning on the visualization of music.Views: 376 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для …
CLUBBEST – reasoning on the visualization of music.Views: 376 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для …
Комментарии