
Views: 2132
 Как здорово летом под теплым дождем с тобою вдвоем оказаться. Как классно по лужам бежать босиком, с тобою играть и смеяться! Но совсем грустно оказаться под таким дождем, который течет с потолка…
Как здорово летом под теплым дождем с тобою вдвоем оказаться. Как классно по лужам бежать босиком, с тобою играть и смеяться! Но совсем грустно оказаться под таким дождем, который течет с потолка…
И хорошая мысля – приходит опосля…
В настоящее время одним из основных элементов домашней автоматики стал контроль над протечкой воды. Протечка воды
может произойти по разным причинам: из-за повреждения водоснабжения у вас или у соседа свыше, или из-за простой случайности, но всегда это довольно неприятное событие. Для того, чтобы обезопасить
себя от такого рода событий был разработан этот проект. Он предусматривает два типа устройств:
– датчик для работы в комплексе с модулем управления аварийным клапаном  водоснабжения. – автономный датчик протечки воды со звуковой сигнализацией – это для тех, у кого пока нет возможности поставить аварийный клапан для отсечки воды, но есть желание получить, хотя бы звуковую сигнализацию.
водоснабжения. – автономный датчик протечки воды со звуковой сигнализацией – это для тех, у кого пока нет возможности поставить аварийный клапан для отсечки воды, но есть желание получить, хотя бы звуковую сигнализацию.
В качестве основы проекта был выбран микроконтроллер PIC-контроллер PIC10F222 в корпусе  SOT-23. Это самый маленький и самый простой контроллер.
SOT-23. Это самый маленький и самый простой контроллер.
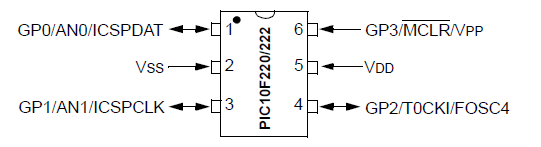 Он имеет четыре порта ввода/вывода, на “борту” есть АЦП, что вполне достаточно для создания датчика контроля протечки воды.
Он имеет четыре порта ввода/вывода, на “борту” есть АЦП, что вполне достаточно для создания датчика контроля протечки воды.
Для первого варианта датчика предусмотрим возможность установки звукоизлучателя (пищалки), а также светодиода индикации. Для второго варианта – выходы индикации работы датчика и сигнал аварии. Этот проект рекомендуется также для начинающих разработчиков, кто впервые столкнулся с программированием микроконтроллеров.
Отступление от темы: Почему микроконтроллер, а не операционный усилитель или компаратор. Во первых – наше время – время микроконтроллеров; во вторых -аналоговые устройства подразумевают наличие потенциометров для настройки параметров, “уход нуля” – может со временем приводить к необходимости регулировки чувствительности датчика, что крайне нежелательно для такого рода устройств. При этом чувствительность может возрасти (вызовет ложное “срабатывание” аварии) или наоборот уменьшится (датчик не сработает когда начнется потоп!), а АЦП избавлен от причуд “плавания нуля” – поэтому и выбрали микроконтроллер и ещё плюс – решение всех проблем с логикой работы датчика.
Принцип контроля протечки воды
Принцип на котором будет работать датчик – это измерение падения напряжения между контактами (электродами), которые будут контролировать наличие воды. Датчик будет иметь 4 ножки (электрода), на которых он будет стоять на полу. Любая трубопроводная вода содержит большое количество солей, что делают её проводящей электричество. Построим делитель напряжения на резисторах R1 и R2, и подключим электроды к одному из резисторов. В “сухом” состоянии, при одинаковых резисторах, мы будем иметь 2,5 V на резисторе R2 (питание 5 V). При попадании воды в зону электродов суммарное сопротивление (электроды + резистор R2) начнет уменьшаться, что приведет к понижению напряжения на делителе. Задав уровень аварийного порога и гистерезис, мы по изменению величины напряжения на резисторе R2 сможем контролировать протечку воды.
Теперь надо разобраться, как это будет понимать сам микроконтроллер. У микроконтроллера PIC10F222 8-битный АЦП. Опорными напряжениями для него служат Vcc и Vss, т.е. он может оцифровывать напряжения в диапазоне напряжения питания 0-5 V. Это значит, что он делит этот диапазон на 256 значений. При чтении данных из регистра АЦП – ADRES мы сможем получить значение от 0 до 255.
Если для делителя мы выбрали резисторы с одинаковым сопротивлением, то получим 2,5 V (приблизительно). 2,5 V для АЦП даст нам на выходе число 2,5/(5/256)=128. Это значит, что в “сухом” состоянии с АЦП будем считывать значение 128. При “замыкании” электродов водой напряжение естественно будет понижаться. Вопрос насколько? Все это можно выяснить только экспериментальным путем. Берем вольтметр, подключаем к электродам датчика, включаем питание и меряем напряжение. В “сухом” состоянии у меня было 2,43 V, при замыкании контактов пальцами руки, напряжение понижалось до 2,1 V. Это значит, что для микроконтроллера мы будем иметь значение “сухое” – 124, и так называемое “мокрое” – 107. Это изменение на сопротивление пальцев руки, для воды оно будет значительней, но и этих данных достаточно для задания параметров работы микроконтроллера. Выберем порог срабатывания 100 и гистерезис 5. Гистерезис необходим для создания зоны устойчивости в районе порога срабатывания. Это значит, что Авария “сработает” когда значение получаемое от АЦП станет ниже 100-5=95 и отключится – когда станет выше 100+5=105.
О понятии параметра “чувствительность датчика” можно сказать, что чем мы ниже понижаем порог, тем меньше его чувствительность. Чем больше гистерезис, тем больше защита от помех. Но все хорошо в меру. У нас верхний теоретический порог 128, на практике он может быть выше или ниже (все зависит от точности напряжения стабилизации стабилизатора, и погрешности величины сопротивлений выбранных нами резисторов). Визуальное расположение уровней контроля должно быть таким как на рисунке.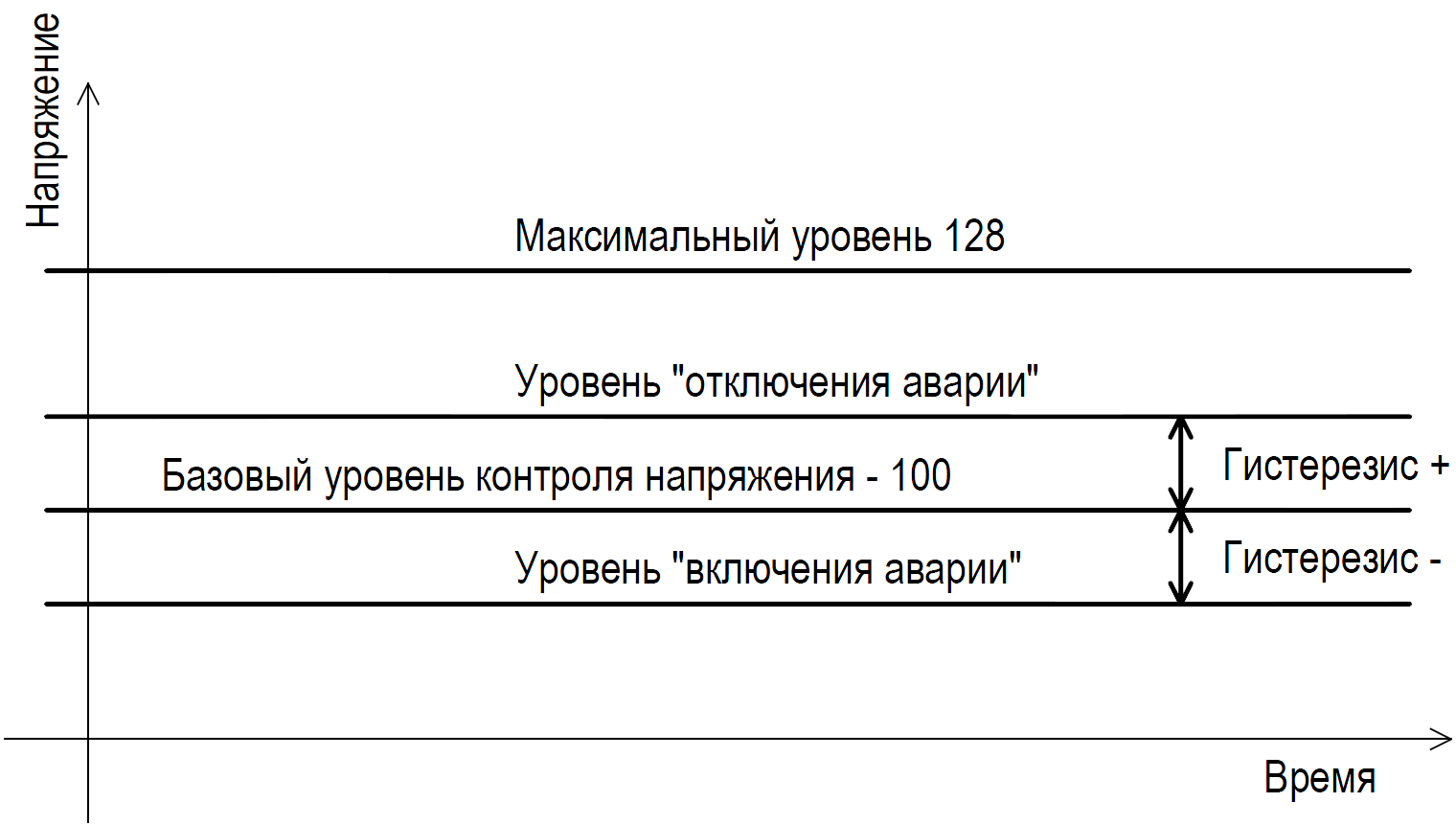
Реально датчики работали с уровнем контроля напряжения – 80 и гистерезисом – 20. Эти параметры зависят только от интуиции и опыта разработчика.
Схема датчика контроля протечки воды
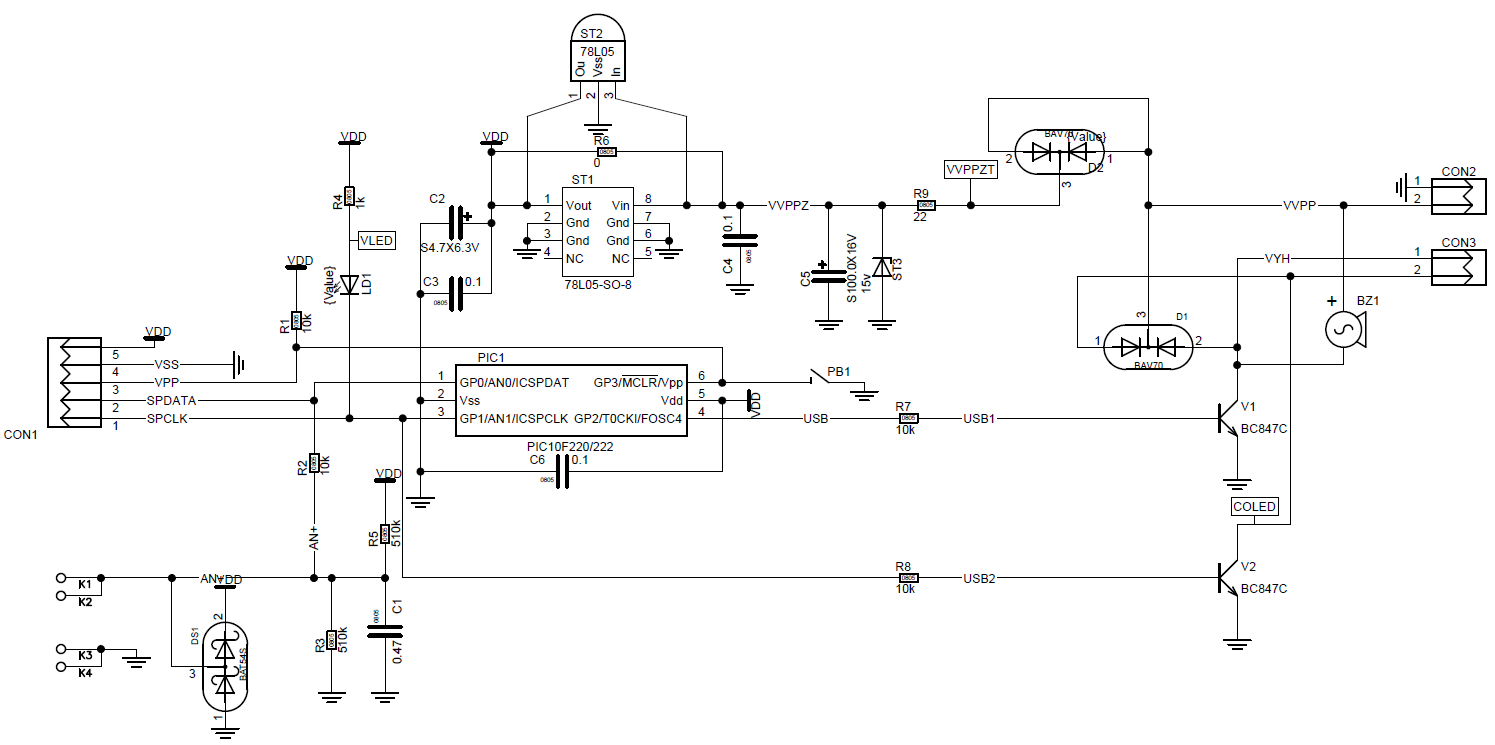
На основании рассмотренных выше рассуждений спроектируем схему. Остановимся на некоторых особенностях. Соединитель CON1 предназначен для внутрисхемного программирования микроконтроллера. Это избавит от проблемы предварительного программирования контроллера перед пайкой. Для защиты аналогового входа установим диодную сборку BAT54S. Измерительный делитель выполним на резисторах R3 и R5 величиной 510 кОм (этим делителем определяется и входное сопротивление датчика, т.е. его электрическая чувствительность). Для фильтрации установим конденсатор C1 величиной 0,1-0,47 мкФ. Через резистор R2 величиной 10 кОм подадим сигнал на вход AN0. Цифровой порт GP1 будем использовать для индикации работы датчика. Сделаем так: если светодиод медленно мигает, значит, датчик работает, если мигает быстро, то обнаружена протечка воды. Такой алгоритм работы необходим, чтобы можно было легко контролировать работоспособность датчика. Для автономного датчика вывод GP2 будет управлять звуковым сигналом. Алгоритм работы следующий: если молчит, то нет протечки, а если раздается периодический сигнал, то это значит, что есть протечка воды. Если “попискивает” – была протечка.
Сброс аварии и возврат в дежурный режим выполняется отключением питания. На выходе портов предусмотрим транзисторные ключи для возможности подключения исполнительных устройств типа реле. Питание датчика выберем стандартное для сырых помещений – 12 V, для этого на плате предусмотрим место для стабилизатора, учитывая разные варианты корпусов TO-92 или SOIC-8. Для защиты от неправильного подключения и наводок высокого напряжения на сигнальный кабель установим цепочку защиты D2, R9, ST3.
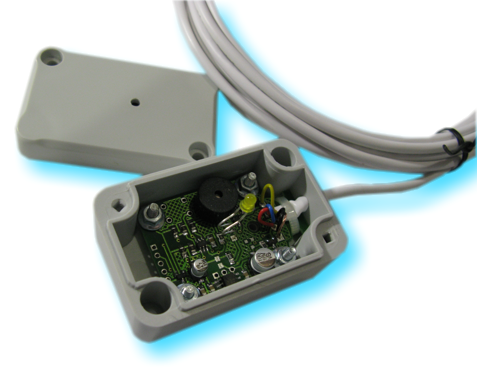
Корпус для датчика
Изготовление такого типа устройств не мыслимо без корпуса, поэтому перед проектированием платы для датчика контроля протечки воды был выбран корпус Z65J польского производства.
Печатная плата ch-c0020pcb
Печатная плата изготовлена с возможностью установки в корпус Z-65.
Габаритные размеры платы и сборочный чертеж
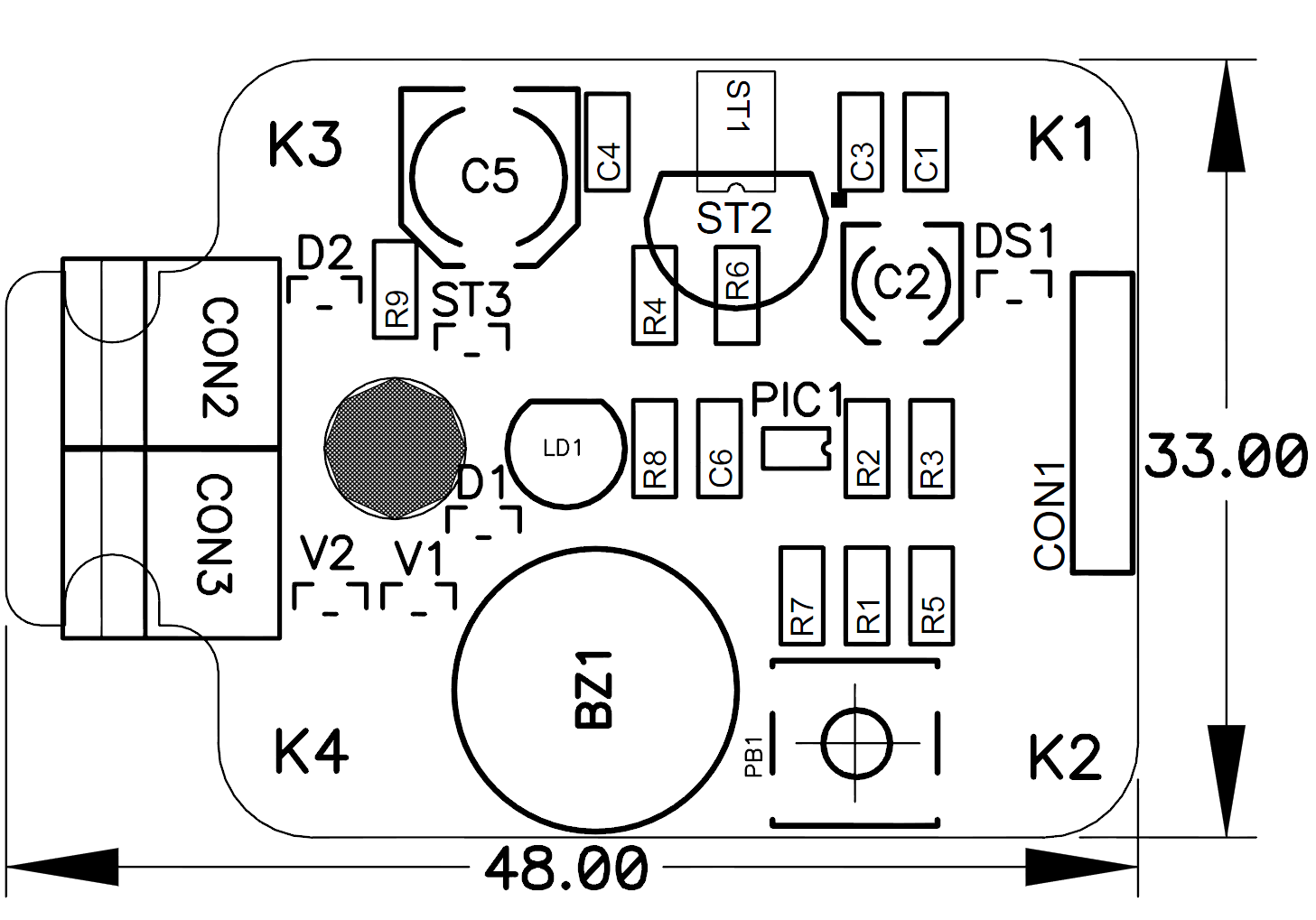
Форма платы предусматривает возможность крепления кабеля пластиковым зажимом и установку тактовую кнопки (в этом проекте не используется). Есть контакты для внутрисхемного программирования контроллера, что удобно и в изготовлении и на этапе проектирования, разработки и отладки.
Комплектующие для самостоятельной сборки
В таблице приведен тип, необходимое количество деталей для сборки датчика, а также ссылки, по которым можно реально приобрести детали.
| Наименование | Типоразмер | Тип | Количество | Примечание |
| Стабилизатор | SOIC-8 (TO-92) | 78L05 | 1 | ST1(ST2) |
| Микроконтроллер | SOT-23 | PIC10F222 | 1 | PIC1 |
| Транзистор | SOT-23 | BC847C | 1 | FT1 |
| Диодная сборка | SOT-23 | BAV70 | 1 | D1 |
| Диодная сборка | SOT-23 | BAT54S/BAT64-04 | 1 | J1* |
| Стабилитрон | SOT-23 | BZX84-C20V | 1 | J1* |
| Звукоизлучатель | Ф9мм | KPX1212B | 1 | J1* |
| Конденсатор | 0805 | 0,47х25v или (0,1х50v) | 1 | C1 |
| Конденсатор | 0805 | 0,1х50v | 3 | C3,C4,C6 |
| Эл.конденсатор | А | 4,7х35v | 1 | C2 |
| Эл.конденсатор | С | 100х16v | 1 | C5 |
| Резистор | 0805 | 510 кОм | 2 | R3,R4 |
| Резистор | 0805 | 10 кОм | 3 | R2,R8,R7 |
| Резистор | 0805 | 22 | 1 | R9 |
| Светодиод красный | 0805 | Светодиод 3мм FYL-3014 HD Красный матовый 3mcd | 1 | LD1 |
| Печатная плата | ch-c020pcb | 1 | ||
| Корпус | Z-65 | 1 |
Последовательность сборки датчика
Сборку датчика контроля протечки воды начинайте с запайки PIC-контроллера и стабилизатора напряжения. Далее запаяйте керамические конденсаторы и резисторы. Следующими идут диодные сборки, стабилитрон, и транзисторы. В конце мы запаиваем электролитические конденсаторы и “пищалку”. На этом сборка платы закончена, остается запрограммировать контроллер и запаять сигнальный кабель.
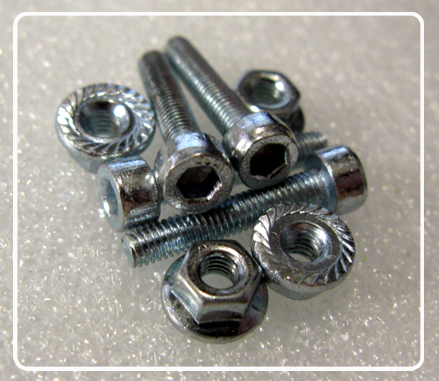
 Рекомендуемые винты и гайки для крепления платы. Винты используются в качестве электродов.
Рекомендуемые винты и гайки для крепления платы. Винты используются в качестве электродов.
Программирование
Для программирования мы будем использовать стандартный соединитель. Необходимо скачать в конце статьи программу или HEX-файл и “прошить” контроллер.
Назначение выводов смотрите на принципиальной схеме или в описании платы.
Для программирования PIC-контроллера рекомендуется использовать внутрисхемный отладчик MPLAB ICD3 или программатор-отладчик
MPLAB ICD3 или программатор-отладчик PICkit 3 . Они автоматически заботятся о сохранении заводской калибровочной константы.
PICkit 3 . Они автоматически заботятся о сохранении заводской калибровочной константы.
Программа
В контроллере PIC10F2xx есть одна особенность, у них нет системы прерываний, поэтому программа представляет собой один непрерывный последовательный цикл. Этот вариант программирования удобен для начинающих программистов. На этом примере постараемся разъяснить построение простой (и может первой) программы на PIC-контроллере. Для программирования используется среда MPLAB 8.83 и компилятор С HI-TECH C Compiler for PIC10/12/16 MCUs (PRO Mode) V9.83. Почему сразу С? Потому, что язык С в понимании проще для начинающих.
Как строится программа? Все наши действия вытекают из нашего тех. задания, которые мы изложили в начале.
Первоначально необходимо сконфигурировать PIC-контроллер под наши требования, то-есть, настроить регистр конфигурации. В этом регистре настраиваются основные свойства контроллера: частота тактового генератора, использование вывода сброса, работа сторожевого таймера, защита кода памяти программ… Независимо от того насколько полно описывается работа в подобных статьях, всегда для полного знакомства необходимо обращаться к оригиналу описания на PIC-контроллер.
//--------------------------------------------------------------------------- // конфигурирование контроллера __CONFIG( IOSCFS_8MHZ & // Тактовый генератор на 8 MHz MCPU_OFF & // Pull-up резистор отключен WDTE_ON & // Сторожевой таймер включен CP_ON & // Защита кода включена MCLRE_ON); // Вывод GP3/MCLR настроен на функцию MCLR //---------------------------------------------------------------------------
После этого мы должны описать какие переменные мы будем использовать в программе.
//--------------------------------------------------------------------------- // Описание переменных bit BEEP, // флаг аварии протески ALARM; // флаг состояния порога контроля АЦП int timer, // таймер формирующий длительность светового индикатора dlitel, // переменная формирующая период мигания светового индикатора timerBeep, // таймер формирующий длительность звукового сигнала dlitelBeepOFF,dlitelBeepON; // переменная формирующая период звукового сигнала //---------------------------------------------------------------------------
Следующий шаг, это определения или описания наших констант.
//--------------------------------------------------------------------------- // определения #define LED GP1 // порт индикации #define OUT GP2 // выход управления #define POROG 95 //100 80 #define GISTER 5 //5 20 #define _XTAL_FREQ 8000000 // для __delay //---------------------------------------------------------------------------
Теперь сама программа. В начале программы мы проводим настройку основных рабочих регистров контроллера – это OPTION, затем настройку порта ввода/вывода, регистры TRISGPIO и GPIO. А так как в нашем датчике главную роль играет АЦП, то и его настройка. Обратите внимание, у нас в регистре конфигурации включен сторожевой таймер, это такой модуль микроконтроллеров, который предназначен для борьбы с возможным сбоем работы программы. От чего возможен такой сбой? Работа самой программы зависит не только от программного кода записанного в контроллер, а также и от данных находящихся в ОЗУ контроллера. Если сама программа из-за свойств FLASH памяти относительно надежно защищена, то ОЗУ более подвержено электромагнитным помехам. Принцип контроля работоспособности программы при помощи сторожевого таймера основан на том, что нормально работающая программа должна в своем основном цикле постоянно сбрасывать в ноль (специальной командой) сторожевой таймер. Если программа “зависла”, то нарушается работа основного цикла и таймер не обнуляется. Через определенное время происходит переполнение сторожевого таймера, которое приводит к аппаратному рестарту контроллера. Программа запускается сначала и нормальная работа контроллера возобновляется. Поэтому для работы программы без сбоев необходимо расположить команды сброса сторожевого таймера в главном цикле программы.
//---------------------------------------------------------------------------
// сама программа
void main(void)
{
// Настройка контроллера
CLRWDT(); //сброс сторожевого таймера +++++++++++++++++++++-
// загрузку калибровочной константы си берет на себя
// обнуление порта (правда Си тоже это делает)
GPIO=0;
// настройка регистра OPTION
OPTION=0b11001111;
// |||||+++--- PS<2:0>: настройка предделителя
// ||||+------ PSA: пределитель подключен к сторожевому таймеру
// |||+------- T0SE: счет по фронту импульса на входе T0CKI
// ||+-------- T0CS: вход таймера подключен к внутренему генератору
// |+--------- GPPU: подтягивающие резисторы на GP0, GP1, GP3 отключены
// +---------- GPWU: побуждение по входам GP0, GP1, GP3 отключено
// настройка портов ввода вывода
TRISGPIO=0b11111001;
// |||||||+--- GP0: вход
// ||||||+---- GP1: выход
// |||||+----- GP2: выход
// ||||+------ GP3: вход
// ++++------- не используются
// настройка АЦП
ADCON0=0b01000001;
// |||||||+--- ADON: АЦП включен
// ||||||+---- GO/DONE: статус и запуск конвертирования
// ||||++----- CHS<1:0>: АЦП подключен к входу GP0/AN0
// ||++------- не используются
// |+--------- ANS0: вывод GP0/AN0 настроен как аналоговый
// +---------- ANS1: вывод GP1/AN1 настроен как цифровой
CLRWDT(); //сброс сторожевого таймера +++++++++++++++++++++-
//---------------------------------------------------------------------------
Перед запуском основного цикла необходимо, чтобы все электрические цепи нашей схемы пришли в “нормальное” состояние. У нас есть одна цепь на входе АЦП, которая содержит емкость. Это значит, что ей нужно время, чтобы она зарядилась до необходимого уровня. Если не сделать задержку, то после подачи питания, когда программа войдет в основной цикл, напряжение не успеет на конденсаторе C1 подняться до необходимого уровня. Измеренное напряжение окажется низким и это будет расценено как аварийная ситуация. Для устранения выдачи ошибочной аварии при включении питания вводится цикл ожидания.
//---------------------------------------------------------------------------
// задежка необходимая для заряда входной емкости фильтра
// после подачи питания
timerBeep++; //
while(timerBeep) //
{
GO=1; // включить конвертирование
while(GO); // ожидание окончания конвертирования
timerBeep++; //
}
//---------------------------------------------------------------------------
//---------------------------------------------------------------------------
// главный цикл работы
while(1)
{
CLRWDT(); //сброс сторожевого таймера +++++++++++++++++++++-
//--------------------------------------------------------------------
// измерение потенциала между электродами
GO=1; // включить конвертирование АЦП
while(GO); // ожидание окончания конвертирования
//--------------------------------------------------------------------
// определения состояния аварии
if (ADRES<POROG-GISTER) // сравниваем полученное значение из АЦП
{
if (ALARM==0) // если небыло аварии
{
ALARM=1; // установить аварию
dlitel=5000; // задаем длительность мигания светодиода индикатора
timer=0; // инициализация таймера индикации светодиода
}
}
else if (ADRES>POROG+GISTER) // сравниваем полученное значение из АЦП
{
if (ALARM==1) // если была аварии
{
ALARM=0; // сбросим аварию
dlitel=60000; // задаем длительность мигания светодиода индикатора
timer=0; // инициализация таймера индикации светодиода
}
}
//--------------------------------------------------------------------
// управление светодиодом-индикатором контроля работы датчика
timer++;
if(timer==dlitel && LED==0) // если светодиод отключен и timer==dlitel
{
LED=1; // выключить светодиод
timer=0; // инициализация таймера индикации светодиода
}
else if(timer==dlitel && LED==1) // если светодиод включен и timer==dlitel
{
LED=0; // включить светодиод
timer=0; // инициализация таймера индикации светодиода
}
//--------------------------------------------------------------------
// управление зуммером - подачей звукового сигнала
if(ALARM==1)BEEP=1; // защелка сигнала аварии
if(BEEP==1) // если была авария
{
if(BEEP==1 && ALARM==1) // проверим состояние авария и защелка
{
dlitelBeepOFF=20000;// равномерный сигнал
dlitelBeepON=20000;
}
else
{
dlitelBeepOFF=65000;// "попискивание"
dlitelBeepON=1000;
}
// формирование звукового сигнала
timerBeep++;
if(timerBeep==dlitelBeepOFF && OUT==0)
{
OUT=1;
timerBeep=0;
}
else if(timerBeep==dlitelBeepON && OUT==1)
{
OUT=0;
timerBeep=0;
}
}
}
//---------------------------------------------------------------------------
}//end programm===============================================================
Естественно все мысли по созданию программы трудно полностью изложить. Многое подскажут комментарии. А все остальное можно обсудить на форуме.
Описание программы для второго типа датчика не приводится, чтобы не перегружать статью. В нем только различаются функции управления выходами. Сигнал индикаторного светодиода выводится на модуль управления. В режиме ожидания – подмигивает, показывает, что датчик исправен и работает. Авария – быстрое мигание. Состояние после аварии – медленное мигание. Сигнал управление реле – в режиме ожидания разомкнут, авария и после аварии – замкнут. Сама программа еще проще.
Тестирование прототипа датчика.
Заказать в интернет-магазине Ворон.
Печатная плата ch-c0020pcb 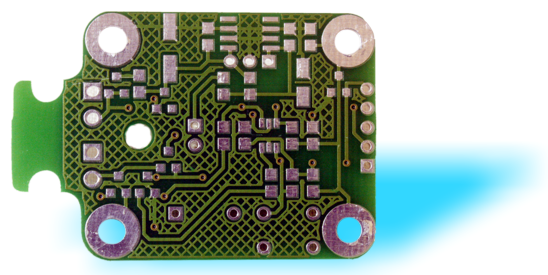
Файлы для загрузки
Схема датчика (полная) — формате[wpdm_file id=118 template=”link-template-calltoaction3.php”]Схема датчика (автономный) – формате[wpdm_file id=119 template=”link-template-calltoaction3.php”]Ch-C0020 — Схема Датчика (Для Модуля Управления Аварийным Клапаном Водоснабжения[wpdm_file id=120 template=”link-template-calltoaction3.php”]Ch-C0020 — Сборочный Чертеж Плат[wpdm_file id=121 template=”link-template-calltoaction3.php”]Ch-C0020 — Прошивка A[wpdm_file id=122 template=”link-template-calltoaction3.php”]Ch-C0020 — Прошивка S[wpdm_file id=123 template=”link-template-calltoaction3.php”]Ch-C0020 — Проект[wpdm_file id=124 template=”link-template-calltoaction3.php”]
Это может быть интересно
 ch-светомузыка от теории до реализацииViews: 989 Сразу оговоримся технология или теория ch-светомузыки, это постоянно развивающийся процесс и то что будет сказано сегодня завтра может быть опровергнуто и считаться ошибочным. Назовем само решение проблемы автоматического …
ch-светомузыка от теории до реализацииViews: 989 Сразу оговоримся технология или теория ch-светомузыки, это постоянно развивающийся процесс и то что будет сказано сегодня завтра может быть опровергнуто и считаться ошибочным. Назовем само решение проблемы автоматического … Бегущие огни на WS2812BViews: 5061 В настоящее время большой популярностью стали пользоваться светодиоды со встроенным драйвером WS2812B. Текущий проект предназначен показать возможность использования и управления этими светодиодами. Это и проект и исследование по …
Бегущие огни на WS2812BViews: 5061 В настоящее время большой популярностью стали пользоваться светодиоды со встроенным драйвером WS2812B. Текущий проект предназначен показать возможность использования и управления этими светодиодами. Это и проект и исследование по … Сенсорный выключатель светаViews: 16555 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида …
Сенсорный выключатель светаViews: 16555 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида … NeoPixel LED and PIC24Views: 785 Популярность однопроводной шины для управления светодиода типа WS2812 не ослабевает, а новые типы светодиодов в корпусах 3,5*3,5мм, 2,0*2,0мм становяться все больше привлекательными. Построение дисплеев для анимации требуют все …
NeoPixel LED and PIC24Views: 785 Популярность однопроводной шины для управления светодиода типа WS2812 не ослабевает, а новые типы светодиодов в корпусах 3,5*3,5мм, 2,0*2,0мм становяться все больше привлекательными. Построение дисплеев для анимации требуют все … ESP8266 применение в проектахViews: 3810 (Актуально только для версий прошивки 1.хх) ESP8266 показала себя как надежное и безотказное устройство для обмена данными с применением WIFI. Я использую ESP8266 исключительно через UART, с применением AT …
ESP8266 применение в проектахViews: 3810 (Актуально только для версий прошивки 1.хх) ESP8266 показала себя как надежное и безотказное устройство для обмена данными с применением WIFI. Я использую ESP8266 исключительно через UART, с применением AT … TM1650 драйвер LED семисегментного индикатораViews: 18551 UPDATES 2025/10/10 Китайский производитель Shenzhen Titan Micro Electronics Co., Ltd. Выпускает широкую линейку драйверов управления светодиодными дисплеями, которые позволяют разгрузить микроконтроллер для основной работы, главная особенность этих драйверов …
TM1650 драйвер LED семисегментного индикатораViews: 18551 UPDATES 2025/10/10 Китайский производитель Shenzhen Titan Micro Electronics Co., Ltd. Выпускает широкую линейку драйверов управления светодиодными дисплеями, которые позволяют разгрузить микроконтроллер для основной работы, главная особенность этих драйверов … Простой цифровой милливольтметр постоянного токаViews: 4234 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля …
Простой цифровой милливольтметр постоянного токаViews: 4234 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля … LM317 и светодиодыViews: 8216 LM317 и светодиоды статья с переработанная с сайта http://invent-systems.narod.ru/LM317.htm Долговечность светодиодов определяется качеством изготовления кристалла, а для белых светодиодов еще и качеством люминофора. В процессе эксплуатации скорость деградации кристалла …
LM317 и светодиодыViews: 8216 LM317 и светодиоды статья с переработанная с сайта http://invent-systems.narod.ru/LM317.htm Долговечность светодиодов определяется качеством изготовления кристалла, а для белых светодиодов еще и качеством люминофора. В процессе эксплуатации скорость деградации кристалла … Analog-to-Digital Converter with Computation Technical BriefViews: 1528 Аналого-цифровой преобразователь с вычислительным модулем. ВВЕДЕНИЕ Аналого-цифровой преобразователь (ADC) с вычислительным модулем (ADC2) в 8-разрядном микроконтроллере Microchip имеет встроенные вычислительные функции, которые обеспечивают функции пост-обработки, такие как передискретизация, …
Analog-to-Digital Converter with Computation Technical BriefViews: 1528 Аналого-цифровой преобразователь с вычислительным модулем. ВВЕДЕНИЕ Аналого-цифровой преобразователь (ADC) с вычислительным модулем (ADC2) в 8-разрядном микроконтроллере Microchip имеет встроенные вычислительные функции, которые обеспечивают функции пост-обработки, такие как передискретизация, … CAN – Controller Area NetworkViews: 1271 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, …
CAN – Controller Area NetworkViews: 1271 Controller Area Network (CAN) первоначально был создан немецким поставщиком автомобильных систем Робертом Бош в середины 1980-х для автомобильной промышленности как метод для обеспечения возможности надежной последовательной связи. Целью было сделать автомобили более надежными, …