Views: 1170
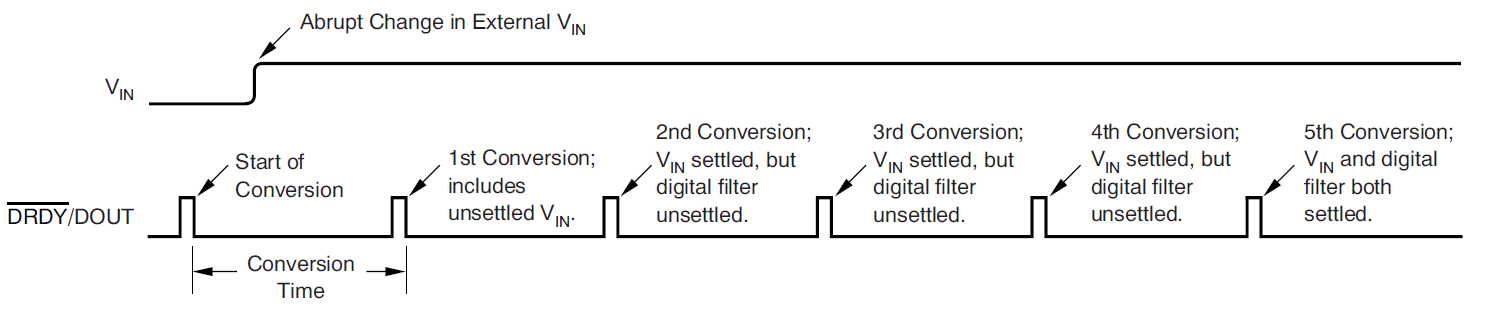
 АЦП ADS1230 – это 20 битный АЦП со скоростью измерения 10 или 80 раз в секунду. При подаче питания АЦП постоянно выполняет измерения. Данные можно получить с него по SPI шине. Максимальная тактовая частота шины до 1 мГц. Каждое измерение выполненное АЦП инициализируется самим АЦП по шине данных положительным импульсом. Чтение микроконтроллер должен начинать по получению отрицательного фронта.
АЦП ADS1230 – это 20 битный АЦП со скоростью измерения 10 или 80 раз в секунду. При подаче питания АЦП постоянно выполняет измерения. Данные можно получить с него по SPI шине. Максимальная тактовая частота шины до 1 мГц. Каждое измерение выполненное АЦП инициализируется самим АЦП по шине данных положительным импульсом. Чтение микроконтроллер должен начинать по получению отрицательного фронта.
Данные передаются старшим битом в перед для чтения 20 бит необходимо 3 байта. Данные выровнены влево.
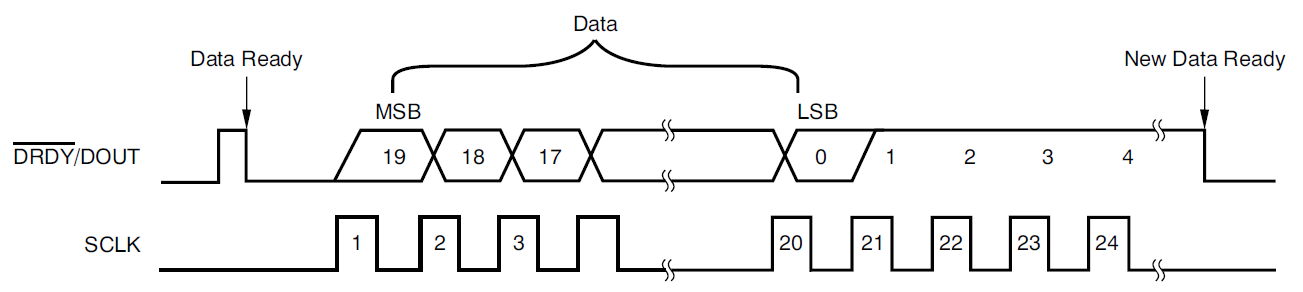
Для чтения данных необходимо настроить SPI по отрицательному фронту синхроимпульсов.
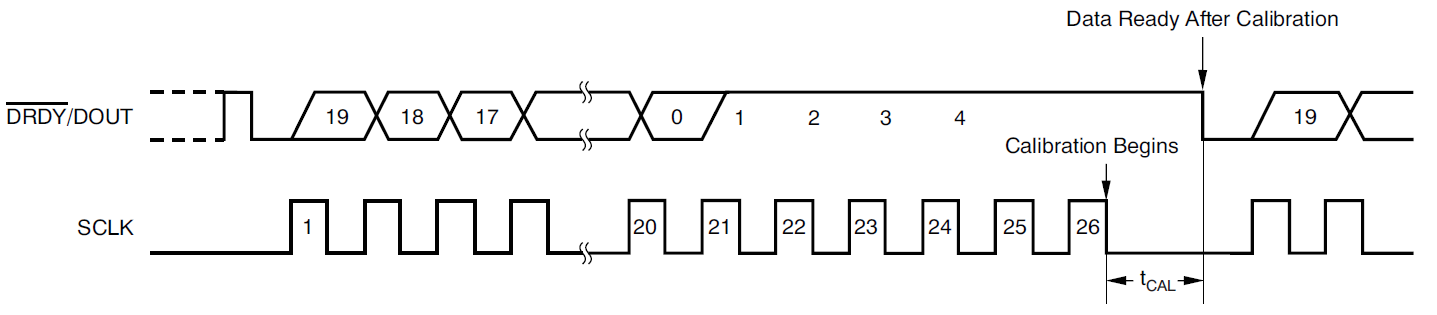
Управляя количеством синхроимпульсов можно управлять функциями АЦП, одна из них это калибровка АЦП.
Калибровки смещения
Калибровка смещения может быть начата в любое время для компенсации в ADS1230 погрешности смещения. Чтобы начать калибровку смещения, необходимо по крайней мере, два дополнительных SCLKs после получения 20 бит данных. Данные мы получаем чтением 24 бита. Если продолжить формирование SCLK, то задний фронт 26-го SCLK начинается цикл калибровки. Дополнительные импульсы SCLK могут быть отправлены после 26 SCLK, однако, активность на шине SCLK должны быть сведены к минимуму, во время калибровки смещения, для достижения наилучших результатов. В течение выполнения функции калибровки, аналоговые входные контакты отсоединены от входов АЦП и соответствующий сигнал подается внутри, чтобы выполнить калибровку. Когда калибровка завершена, DRDY/DOUT переходит в низкий уровень, что указывает, что новые данные готовы. Первое преобразование после калибровки содержит достоверные данные.
Стандартная схема подключения АЦП к мосту датчика для измерения веса.
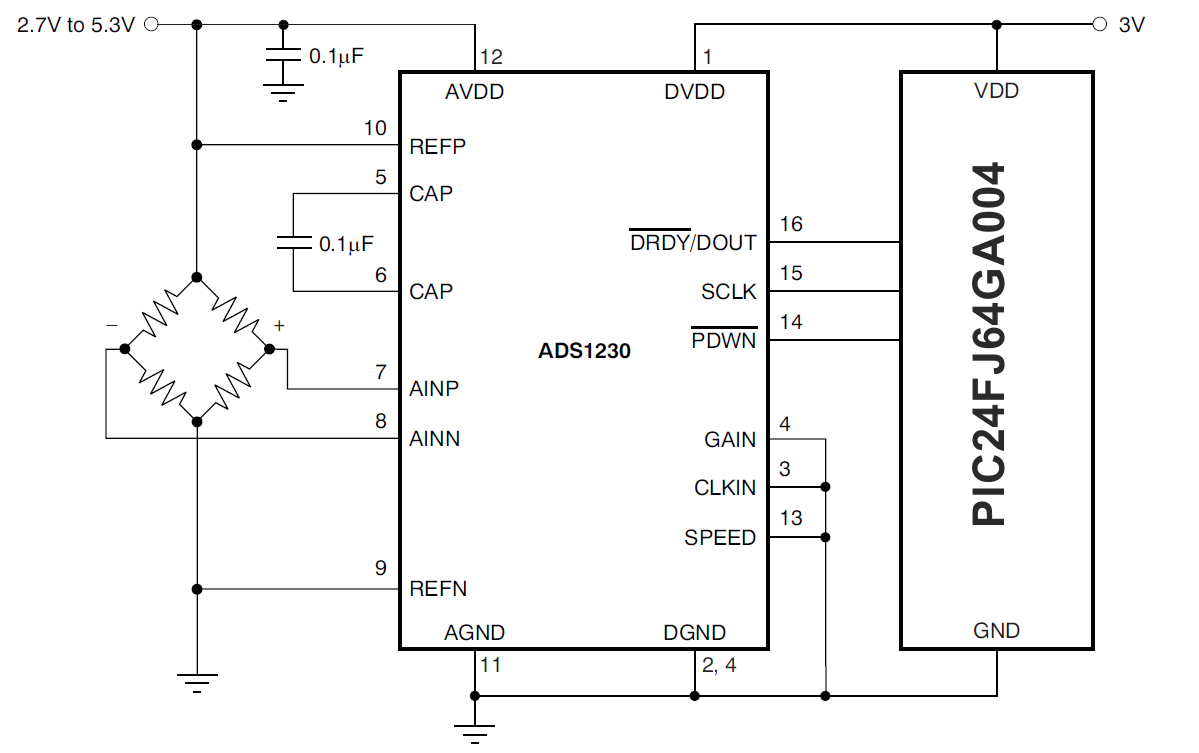
Вариант подключения АЦП к PIC24FJ64GA004.
Подключение будет выполнено к SPI2
void init_spi2 (void) // настройка SPI2
/* настраивается только на приём данных
* данные с АЦП
*/
{
/* SPI2 - настройка для работы с входным усилителем и индикатором
* PPRE
* 11 = Primary prescale 1:1
* 10 = Primary prescale 4:1
* 01 = Primary prescale 16:1
* 00 = Primary prescale 64:1
* SPRE
* 111 = Secondary prescale 1:1
* 110 = 2
* 101 = 3
* 100 = 4
* 011 = 5
* 010 = 6
* 001 = 7
* 000 = Secondary prescale 8:1*/
// RPOR4bits.RP9R=0b01001; // SPI2 Slave Select Output//CS
// RPOR6bits.RP12R=0b01010; // SPI2 Data Output
RPINR22bits.SDI2R = 20; // SPI2 Data Input - RP20/ нога 37
RPOR10bits.RP21R=11; // SPI2 Clock Output
SPI2STATbits.SPIEN = 0; // выключить
SPI2CON1 = 0b0000000000111001; //FCY/1/6=50/6=8,3
/* ||||||||||||||++--- PPRE<1:0>: настройка предделителя 1 11 = Primary prescale 4:1
* |||||||||||+++----- SPRE<2:0>: настройка предделителя 2 111 = Primary prescale 8:1
* ||||||||||+-------- MSTEN: 1 = Режим ведущего, 0 = режим ведомого
* |||||||||+--------- CKP:0 = пассивный уровень шины SCL 1- высокий, 0-низкий
* ||||||||+---------- SSEN:Slave Select Enable bit (Slave mode)
* |||||||+----------- CKE: смена бита данных происходит: 1-от активного в пассивное(синх-0/1)/0-пассивного в активное (синх-1/0)
* ||||||+------------ SMP:0 = Input data sampled at middle of data output time
* |||||+------------- MODE16: Communication is word-wide (8 bits)
* ||||+-------------- DISSDO: 0-в работе
* |||+--------------- DISSCK: 0-в работе
* +++---------------- не используются
*/
SPI2CON2 = 0b0000000000000000;
/* |||||||||||||||+--- не используется
* ||||||||||||||+---- FRMDLY:
* |||+++++++++++----- не используются
* ||+---------------- FRMPOL:
* |+----------------- SPIFSD:
* +------------------ FRMEN:
*/
SPI2STAT = 0b1000000000000000;
/* |||||||||||||||+--- SPIRBF: Флаг приемного буфера 1 - данные приняты 0- прием выполняется SPI2RXB пуст
* ||||||||||||||+---- SPITBF: Флаг передатчика 1 - передача не началась (буфер полон), 0 - передача началась буфер пуст (устанавливается сбрасывается аппаратно)
* ||||||||||++++----- не используются
* |||||||||+--------- SPIROV: 1 - произошло переполнение 0 - нет переполнения премного буфера.
* |||++++++---------- не используются
* ||+---------------- SPISIDL: режим работы в состоянии ожидания 0 - работает 1 - отключен модуль
* |+----------------- не используется
* +------------------ SPIEN: 1 - модуль включен 0 - выключен.
*/
SPI2STATbits.SPIEN = 1; // БИТ Включить - должен быть активирован последним, чтобы вступили в действии все изменения.
}
Сама обработка данных и синхронизация выполняется через прерывания по входу через которые на SPI2 поступают данные. Настройка прерывание:
void ADCIZ (void)// включить измерение
{
ADCVMOSST=1; // подать питание на датчик
ADCPDWN=1; // включить ADC
CNEN2bits.CN25IE=1; // разрешить прерывание по входу
_CNIF = 0; // сбросить прерывание
_CNIE = 1; // включить прерывание
}
Первые две строчки это если есть необходимость в управлении подачей питания на измерительный мост и управления режимом “слип” АЦП. Следующие три строки это настройка режима прерывания по входу через который АЦП получает данные.
Получение данных происходит через функцию прерывания:
void __attribute__((interrupt, auto_psv)) _CNInterrupt (void)
{
unsigned long datain;
_LATB2=!_LATB2; // индикация работы АЦП
while(PORTCbits.RC4); // ожидать низкого уровня на входе
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad]=datain<<16; // загрузка данных в буфер, сброс бита SPIRBF
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad]+=datain<<8; // загрузка данных в буфер, сброс бита SPIRBF
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad++]+=datain; // загрузка данных в буфер, сброс бита SPIRBF
if(ucazad==filtrADC)ucazad=0; // инициализация указателя.
//калибровка
if(Bit.calADC) // если установлен выполнить калибровку
{
Bit.calADC=0; // сбросить флаг калибровки
SPI2BUF=0; //
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF; // сброс бита SPIRBF
}
_CNIF = 0; // сброс прерывания
}
Флаг Bit.calADC – предназначен для активирования режима калибровки. Данные загружаются в буфер ADCbufer[] размер которого может быть ограничен переменной filtrADC.
Это может быть интересно
 Простой цифровой милливольтметр постоянного токаViews: 4165 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля …
Простой цифровой милливольтметр постоянного токаViews: 4165 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля … УКВ – радиоприем, часть 2Views: 6363 Пришло свободное время решил вторую часть проекта реализовать (правда есть мысль и третью с использование цветного OLED и функцией ch-светомузыки, но это только задумка… Для понимания функций интегрального …
УКВ – радиоприем, часть 2Views: 6363 Пришло свободное время решил вторую часть проекта реализовать (правда есть мысль и третью с использование цветного OLED и функцией ch-светомузыки, но это только задумка… Для понимания функций интегрального … Altium Designer my setup system and project structure V23.3Views: 274 Оновлення бази даних та шаблонів від березня 2023 року. Updating the database and templates from March 2023. Altium Designer my Libraries, Project templates, System settings by Catcatcat. Дивись …
Altium Designer my setup system and project structure V23.3Views: 274 Оновлення бази даних та шаблонів від березня 2023 року. Updating the database and templates from March 2023. Altium Designer my Libraries, Project templates, System settings by Catcatcat. Дивись … Цифровой спидометр для автомобиляViews: 10269 Универсальность печатной платы ch-c0030pcb позволяет создавать на её основе разнообразные устройства. Одним из таких устройств является электронный спидометр для автомобиля, в котором можно задать два компаратора скорости, например, для …
Цифровой спидометр для автомобиляViews: 10269 Универсальность печатной платы ch-c0030pcb позволяет создавать на её основе разнообразные устройства. Одним из таких устройств является электронный спидометр для автомобиля, в котором можно задать два компаратора скорости, например, для … Система отопления на солнечных коллекторах от Дмитрия (rv3dpi)Views: 3383 Солнечные коллекторы для отопления в Европе используют в более 50% от общего количества установленных гелиосистем. Однако следует понимать, что гелиосистемы предназначены лишь для поддержки отопления и экономии затрат на основную …
Система отопления на солнечных коллекторах от Дмитрия (rv3dpi)Views: 3383 Солнечные коллекторы для отопления в Европе используют в более 50% от общего количества установленных гелиосистем. Однако следует понимать, что гелиосистемы предназначены лишь для поддержки отопления и экономии затрат на основную … Moving average – скользящее среднееViews: 2333 Скользящая средняя, скользящее среднее (англ. moving average, MA) — общее название для семейства функций, значения которых в каждой точке определения равны среднему значению исходной функции за предыдущий период. Скользящие средние обычно используются с данными временных рядов для сглаживания …
Moving average – скользящее среднееViews: 2333 Скользящая средняя, скользящее среднее (англ. moving average, MA) — общее название для семейства функций, значения которых в каждой точке определения равны среднему значению исходной функции за предыдущий период. Скользящие средние обычно используются с данными временных рядов для сглаживания … Altium Designer my Libraries, Project templates, System settings by Catcatcat V23.09Views: 502 September 2023 component base update. Release updates V. – 23_09 added new components. Changed the structure of the database. Configuration file name – DXPPreferences1.DXPPrf. Added project CLUBBEST_50_Light. …
Altium Designer my Libraries, Project templates, System settings by Catcatcat V23.09Views: 502 September 2023 component base update. Release updates V. – 23_09 added new components. Changed the structure of the database. Configuration file name – DXPPreferences1.DXPPrf. Added project CLUBBEST_50_Light. … Сумеречное релеViews: 1600 Реле управления освещением, датчик день-ночь – одним словом фотореле для управления освещением или формирования сигнала для системы умный дом о понижении или повышении освещенности относительно заданного уровня. Реле выполнено по классической схеме, конденсаторный блок питания, от сети переменного тока …
Сумеречное релеViews: 1600 Реле управления освещением, датчик день-ночь – одним словом фотореле для управления освещением или формирования сигнала для системы умный дом о понижении или повышении освещенности относительно заданного уровня. Реле выполнено по классической схеме, конденсаторный блок питания, от сети переменного тока … ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 6043 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. …
ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 6043 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. … Стабилизатор тока для светодиодов SN3350Views: 2713 SN3350 ближайший аналог ZXLD1350 Как собрать готовый вариант, читайте во второй части – http://catcatcat.d-lan.dp.ua/stabilizator-toka-na-sn3350-chast-2/ 40V драйвер светодиодов с внутренним ключом SN3350 – импульсный понижающий преобразователь, разработанный для того, чтобы эффективно управлять одним или …
Стабилизатор тока для светодиодов SN3350Views: 2713 SN3350 ближайший аналог ZXLD1350 Как собрать готовый вариант, читайте во второй части – http://catcatcat.d-lan.dp.ua/stabilizator-toka-na-sn3350-chast-2/ 40V драйвер светодиодов с внутренним ключом SN3350 – импульсный понижающий преобразователь, разработанный для того, чтобы эффективно управлять одним или …