
Views: 474
Дистанционное управление для устройств на микроконтроллерах.
Самый простой вариант это приобрести понравившийся пульт ДУ на ИК и сделать дистанционное управление.
Для этого необходим приемник ИК, желательно выбирать с чтобы совпадала частота несущей, но если даже у вас есть в наличии на 38, а руль с несущей на 38 кГц, все равно работать будет, просто уменьшиться дальность, например при всех идеальных условиях можно управлять с расстоянии более 60 метров, а при всех неблагоприятных не более 10-15.
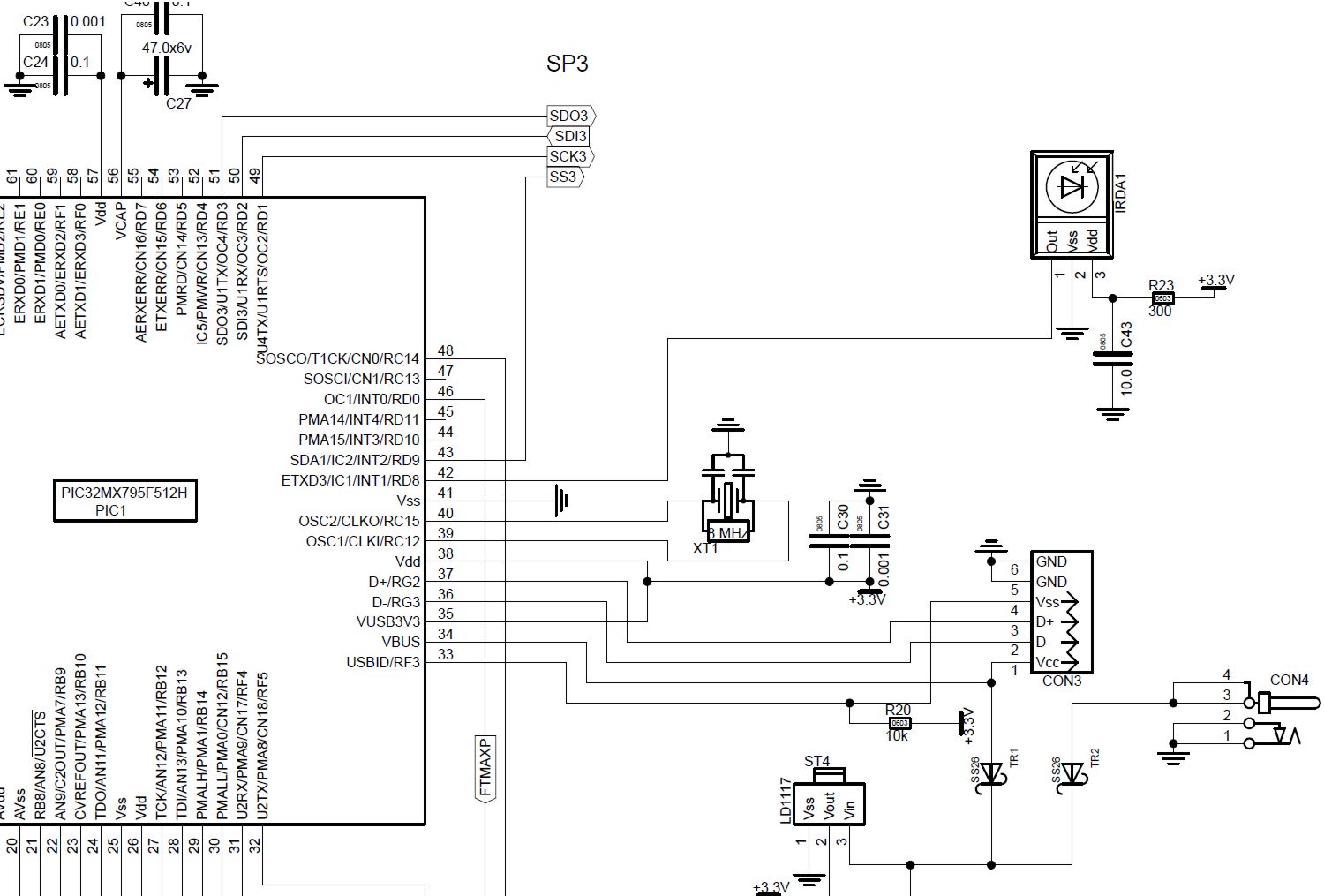
Для декодирования сигналов мы подключаем приемник на прямую на вход INT1 микроконтроллера
И как только это сделано, надо в программу добавить функции обработки. Для обработки мы будем использовать коды типа NEC
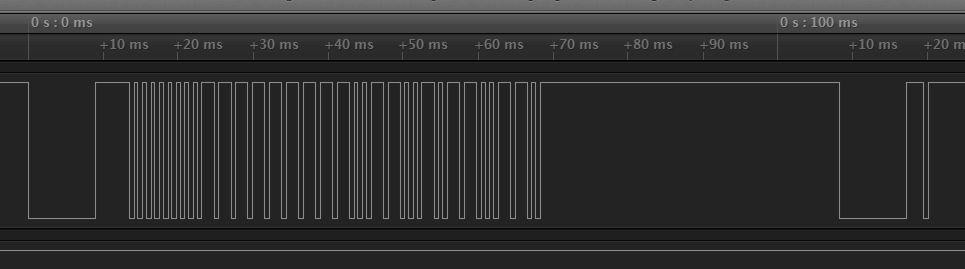
это стандартные коды несущие 32 бита данных.
Принцип работы будет следующий мы используем свойство микроконтроллера для обработки внешних прерываний по входам. Используем вход INT1 и настраиваем, чтобы он формировал прерывания по срезу импульсов. Т.е. в приемниках всегда есть подтяжка (30-50 кОм) и пассивный уровень высокий, при получении модулированного импульса на выходе же формируется низкий уровень. Нам необходимо в момент получения от входа прерывания сосчитать данные с таймера (затем таймер обнулить для подготовки изменения следующего импульса) проверить длительность и по параметрам этой длительности определить это преамбула (начала передачи) или это передача бита ноль, единицы или это код автоповтора (удержание клавиши).
Принцип описан, теперь настройка:
// Настройка прерывания по входу INT1 – External Interrupt 1, вход RD8, ДУ - ИК
INTCONbits.INT1EP = 0; // External Interrupt 1 Edge Polarity Control bit 0 = Falling edge
IPC1bits.INT1IP = 7; // уровень приоритета
IPC1bits.INT1IS = 1; // уровень суб приоритета
IFS0bits.INT1IF = 0; // сбросить флаг прерывания по входу INT1
IEC0bits.INT1IE = 1; // разрешить прерывание по входу INT1
Далее необходимо настроить таймер, он же измеряет время, хочу уточнить, все параметры приведены для тактовой 80 МГц, она же и поступает на периферийные устройства микроконтроллера, и от нее и тактируется таймер.
Настройка таймера
// Настройка таймера Т4 для измерение длительности
T4CON = 0x0; //
PR4 = 0xFFFF; // 6250-200 Гц настройка периода - тактирование
T4CONbits.TCKPS = 0b110; // 111 = 1:256 prescale value
T4CONbits.ON = 1; // включить
// Настройка для таймера 4 прерывания
IPC4bits.T4IP=5; // приоритет 5
IPC4bits.T4IS=3; // суб приоритет уровень 3
IFS0bits.T4IF=0; // сбросить флаг прерывания.
IEC0bits.T4IE=1; // разрешить прерывания от Т1
Самое главное по приоритету, прерывания по входу INT1 должны иметь наивысший приоритет!
Далее программе мы должны включить прерывания и включить мультивекторный режим
// настройка прерываний
INTCONbits.MVEC=1; // включить мульти векторный режим
__builtin_enable_interrupts(); // разрешить прерывания
Теперь вернемся в начало и опишем переменные и флаги управления, это необходимо понимать как функции прерывания будут возвращать в основную программу полученные коды (команды).
// переменные флаги модуля управления с ДУ
// флаги ДУ
volatile struct
{
unsigned NACH : 1; // флаг ожидания ИК команды, устанавливается по переполнению таймера
unsigned POV : 1; // флаг ожидания кодов автоповтора, после приема команды
unsigned PRIEM : 1; // флаг данные готовы, устанавливается когда ИК команда принята
unsigned AUPOV : 1; // флаг автоповтор, удержание клавиши на пульте
}flagIK;
unsigned long chetchic; // счетчик полученных бит
unsigned long data_IK; // код полученной команды, действителен после установки флага PRIEM
unsigned long timeautIK; // таймер установки времени после которого разрешено подача следующей команды
надеюсь с комментов все понятно.
И сами функции прерываний, обработка построена самой возможной простотой и вариантом некоторой степени помехозащищенности, от ИК помех.
Обработка и получение данных
#define CLOBIT 32 // количество бит в передаче
// обработка прерывания по входу INT1
void __ISR(7,ipl7srs) INT1Interrupt (void)
{
unsigned long pwm_reg;
pwm_reg = TMR4; // загрузить значение длительности
TMR4=0; // обнулить таймер
if(pwm_reg>16750&&pwm_reg<17000&&flagIK.NACH) // передача синхроимпульса должна сопровождаться переполнением таймера
{
chetchic=CLOBIT; //счетчик бит (3 байта 8*3=24)
flagIK.NACH=0;
}
else
if (pwm_reg>13750&&pwm_reg<15000&&flagIK.POV) // передача "бита автоповтора"
{
timeautIK=5; // инициализация таймера таймаута
LATBINV = 0b0001000000000000; // мигание светодиода - индикатор для тестирования
flagIK.AUPOV=1; // флаг получение кода автоповтора
}
else
if (pwm_reg>2625&&pwm_reg<2875&&chetchic>0) // передача "1"
{
data_IK<<=1; // выполнить сдвиг
data_IK |= 1; // установить единицу
chetchic--; // подсчет принятых бит
if(!chetchic){flagIK.PRIEM=1;flagIK.POV=1;} // 32 установить флаг команда принята если переданы все 32 бита
}
else
if (pwm_reg>1250&&pwm_reg<1500&&chetchic>0) // передача "0"
{
data_IK<<=1; // выполнить сдвиг (подразумевается запись 0)
chetchic--; //подсчет принятых бит
if(!chetchic){flagIK.PRIEM=1;flagIK.POV=1;} // установить флаг команда принята если переданы все 32 бита
}
else // помеха
{
flagIK.NACH=1; //
chetchic=0; //
}
IFS0bits.INT1IF = 0; // сбросить флаг прерывания по входу INT1
}
Вкратце, “получаем” прерывание, считываем значение из таймера и обнуляем его, пусть меряет следующий импульс. Полученную длительность сравниваем с 4-мя вариантами допусков и в зависимости от того куда эта длительность просочилась, делаем соответствующие тело движения.
Обработка прерывания от таймер, тут необходимая функция это помехозащищенность, он дает разрешение на по таймАУТУ на прием следующей команды и также сбрасывает прием если при приеме не поступило 32 бита.
// обработка прерывание от таймера 4
void __ISR(16,ipl5soft) T4Interrupt (void)
{
if(--timeautIK==0)flagIK.NACH=1; // установит флаг готовноть приема IK команды
chetchic=0; // обнулить счетчик
LATBCLR = 0b0001000000000000; // сбросить флаг индикации
flagIK.AUPOV=0; // флаг получение кода автоповтора
IFS0bits.T4IF=0; // сбросить флаг прерывания.
}
Теперь, что делать в основной программе? В основной программе надо ждать установки флага flagIK.PRIEM=1, если флаг установлен произвести обработка данных помещенных в переменную data_IK. И не забыть сбросить флаг, для приема следующей команды. Также можно использовать флаг flagIK.AUPOV=1, для контроля удержания клавиши ил функции автопостора, например
if(flagIK.PRIEM)
{
flagIK.PRIEM=0;
OledCursor (0, 50);
bin_HEX(data_IK);
}
в этом примере выводим на дисплей код полученной команды.
Информация по ИК – кодам некоторых производителей
CCP модуль для декодирования ИК-кодов пультов ДУ - сводная таблица по кодам. 1.95 MB 79 downloads
CCP модуль для декодирования ИК-кодов пультов...Это может быть интересно
 MPLAB® Harmony – или как это просто! Часть 1.Views: 3746 Часть первая – Установка Гармонии. Музыкальная тема к статье, слушаем: В начале запуска нового проекта и выбора микроконтроллера стоит задача правильно его сконфигурировать, прежде чем перейти к реализации …
MPLAB® Harmony – или как это просто! Часть 1.Views: 3746 Часть первая – Установка Гармонии. Музыкальная тема к статье, слушаем: В начале запуска нового проекта и выбора микроконтроллера стоит задача правильно его сконфигурировать, прежде чем перейти к реализации … Мультизоновый индикатор-терморегулятор ch-c3010Views: 1307 Часто возникает необходимость получить информацию по температуре с множества точек контроля. Вам необходимо знать температуру в комнате, в коридоре, температуру на улице, а в погребе (или на балконе) …
Мультизоновый индикатор-терморегулятор ch-c3010Views: 1307 Часто возникает необходимость получить информацию по температуре с множества точек контроля. Вам необходимо знать температуру в комнате, в коридоре, температуру на улице, а в погребе (или на балконе) … Четырех канальный терморегулятор ch-4000Views: 3326 Четыре независимых канала регулирования температуры, одновременно можно подключить 16 датчиков температуры DS18B20 с удалением до трехсот метров. Можно для регулировки выбрать любой датчик, подключенный к устройству. Каждый канал может работать …
Четырех канальный терморегулятор ch-4000Views: 3326 Четыре независимых канала регулирования температуры, одновременно можно подключить 16 датчиков температуры DS18B20 с удалением до трехсот метров. Можно для регулировки выбрать любой датчик, подключенный к устройству. Каждый канал может работать … Инфракрасный датчик движения, PIR-sensorViews: 3230 Домашняя автоматика предполагает наличие датчиков движения, которые способны контролировать движения человека. Самым простым и доступным устройством позволяющие контролировать изменения ИК-излучения, это ПИР-сенсоры. На текущий момент доступны не дорогие модели D203B, D204B, D205B. Все …
Инфракрасный датчик движения, PIR-sensorViews: 3230 Домашняя автоматика предполагает наличие датчиков движения, которые способны контролировать движения человека. Самым простым и доступным устройством позволяющие контролировать изменения ИК-излучения, это ПИР-сенсоры. На текущий момент доступны не дорогие модели D203B, D204B, D205B. Все … CLUBBEST-50-LightViews: 384 CLUBBEST-50-LIGHT Зміст Короткий опис проекту. 1 Опис схемотехніки візуалізатора музики. 2 Аудіо вхід. 3 MCU. 4 Цифровий вихід. 5 Схема живлення MCU. 6 Складання пристрою. 7 Список …
CLUBBEST-50-LightViews: 384 CLUBBEST-50-LIGHT Зміст Короткий опис проекту. 1 Опис схемотехніки візуалізатора музики. 2 Аудіо вхід. 3 MCU. 4 Цифровий вихід. 5 Схема живлення MCU. 6 Складання пристрою. 7 Список … CLUBBEST – reasoning on the visualization of music.Views: 263 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для …
CLUBBEST – reasoning on the visualization of music.Views: 263 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для … The art of DJViews: 175 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is …
The art of DJViews: 175 The art of DJ. The art of DJ has gained wide popularity. Today, a DJ is not just someone whose task is to mix tracks; a DJ is … Moving average – скользящее среднееViews: 2336 Скользящая средняя, скользящее среднее (англ. moving average, MA) — общее название для семейства функций, значения которых в каждой точке определения равны среднему значению исходной функции за предыдущий период. Скользящие средние обычно используются с данными временных рядов для сглаживания …
Moving average – скользящее среднееViews: 2336 Скользящая средняя, скользящее среднее (англ. moving average, MA) — общее название для семейства функций, значения которых в каждой точке определения равны среднему значению исходной функции за предыдущий период. Скользящие средние обычно используются с данными временных рядов для сглаживания … Цифровой спидометр для автомобиляViews: 10271 Универсальность печатной платы ch-c0030pcb позволяет создавать на её основе разнообразные устройства. Одним из таких устройств является электронный спидометр для автомобиля, в котором можно задать два компаратора скорости, например, для …
Цифровой спидометр для автомобиляViews: 10271 Универсальность печатной платы ch-c0030pcb позволяет создавать на её основе разнообразные устройства. Одним из таких устройств является электронный спидометр для автомобиля, в котором можно задать два компаратора скорости, например, для … Контроллер управления светодиодным освещением с дистанционным управлениемViews: 2037 Все активнее светодиоды входят в нашу жизнь. Всё эффективнее становится светодиодное освещение. Всё ниже опускаются цены. Всё больше появляется возможностей получения сочных цветов, простоты в управлении. Всё чаще …
Контроллер управления светодиодным освещением с дистанционным управлениемViews: 2037 Все активнее светодиоды входят в нашу жизнь. Всё эффективнее становится светодиодное освещение. Всё ниже опускаются цены. Всё больше появляется возможностей получения сочных цветов, простоты в управлении. Всё чаще …