
Views: 6965
Музыкальная тема к статье, слушаем:
Настало время познакомиться c ESP32 и для меня, для этого я приобрел в ГАММЕ отладочную плату с модулем ESP-WROOM-32 (ESP32-DevKitC).
Первая задача, как он подключается, ну сразу втыкаем в USB, соединитель вроде как имеется, ну чего бы не воткнуть. CP2102 великолепный мост подключается легко к Windows. Горит светик на плате, типа все ок.
Что сразу беспокоит, какая версия залита, как её проверить и как обновить модуль. Если по ангиологии с ESP8266, то ничего не получилось. Потом порылся в инете и нашел следующие открытия ESP32 имеет уже 2 ком порта, первый порт выведен (на этой плате) на CP2102 и предназначен для обновления прошивки. Второй порт выведен на “ноги” 16 и 17 на плате. Этот порт предназначен для работы с AT командами.
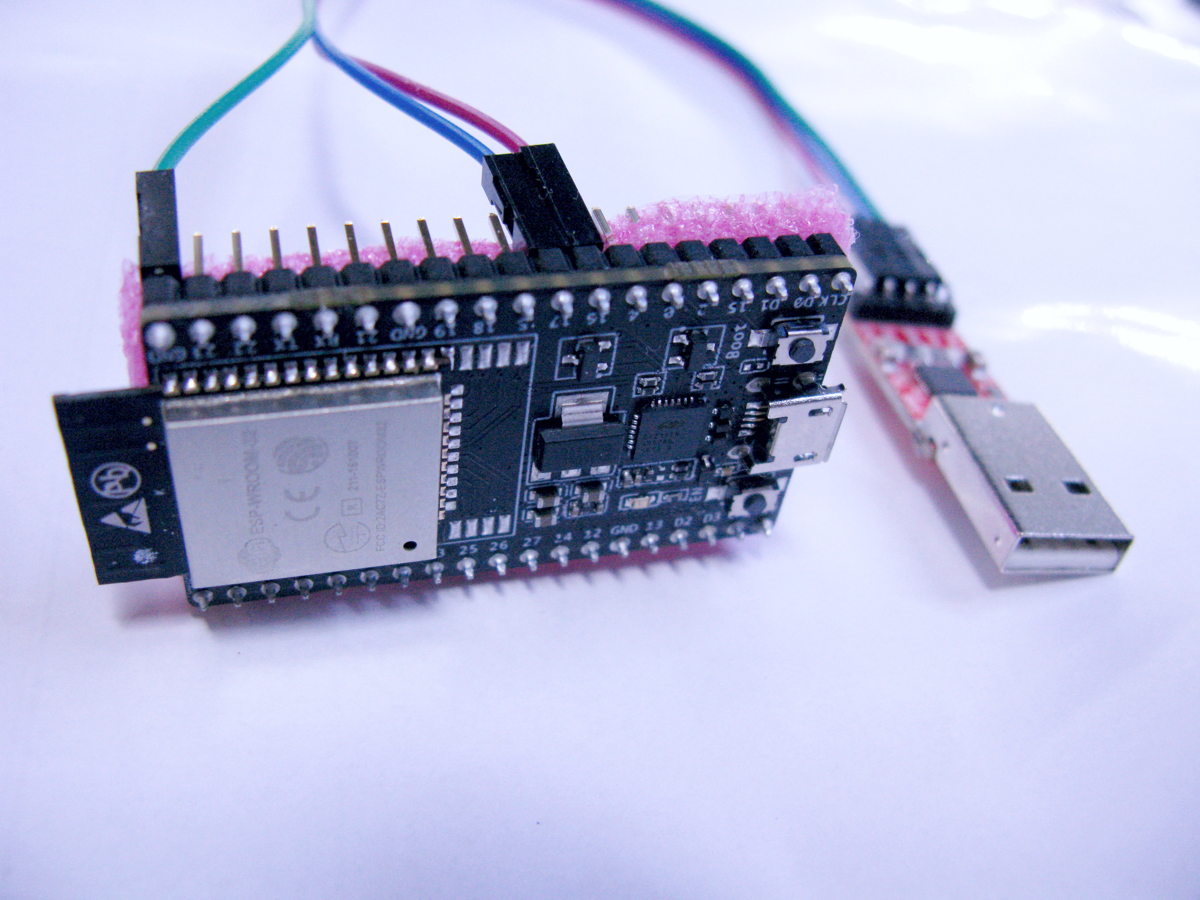
Для полноценного тестирования необходимо для начала подключить плату к имеющемуся порту, ко второму порту надо будет подключить еще один преобразователь. Подключение надо выполнить следующим образом:
| SP32-DevKitC | Дополнительный адаптер | Примечание |
| GND | GND | общий (земля) |
| 17 (TXD) | RXD | Передача данных с модуля |
| 16 (RXD) | TXD | Прием данных с ПК |

Модуль с подключенным к нему вторым адаптером для работы с AT – командами.
Собрав схему нам потребуется программа Flash Download Tools (ESP8266 & ESP32) для прошивки модуля, загрузить её можно с сайта производителя здесь. На момент тестирования была версия V3.6.5.
Последнюю прошивку для модуля можно скачать здесь. На момент написания статьи версия была V1.1.2.
Для работы с компортом рекомендую программу c сайта http://www.cmsoft.cn, там конечно ничего не понятно, но хром и гугл-транслятор вам в помощь. Они сделали две программы NetAssist и UartAssist вещи просто не заменимы для работы с компортом и для тестирования модулей для работы в сети. Эти программы разработчик постоянно поддерживает. В последних добавлена значительно удобная панель для работы предустановленными последовательностями, а также калькулятор CRC.
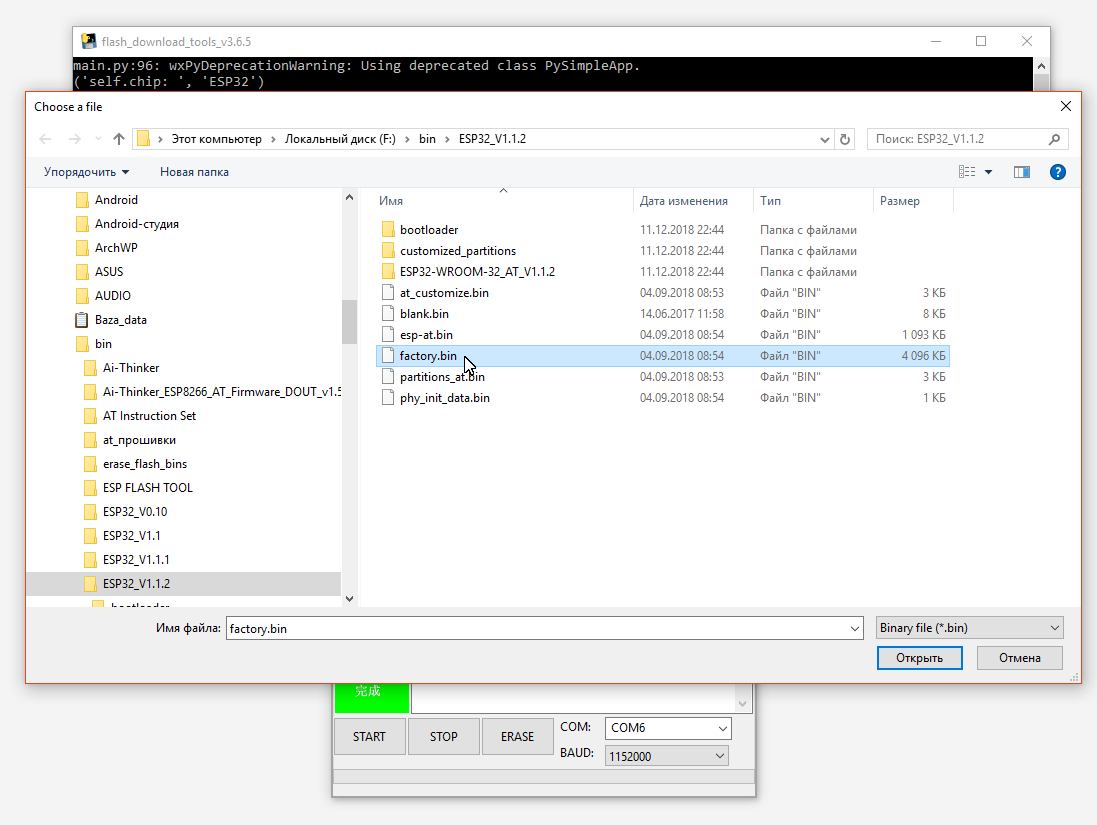
Когда скачаны все необходимы программы и обновления прошивки, необходимо для начала разобраться что необходимо загружать в модуль для обновления. После скачивания прошивки мы получим файл ESP32-WROOM-32_AT_V1.1.2.zip. Разархивируем его в папку, мы получим: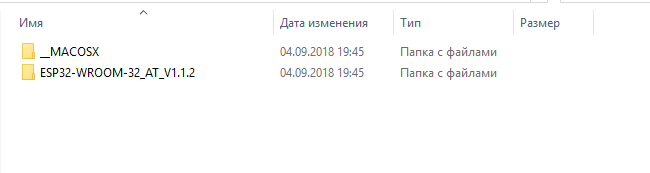
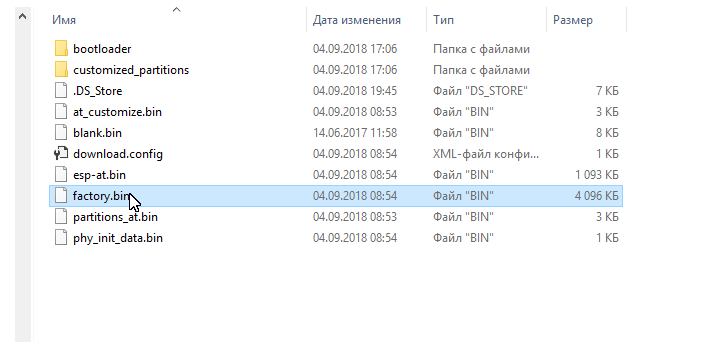
Нас интересует папка ESP32-WROOM-32_AT_V1.1.2 заходим внутрь, там еще одна пака ESP32-WROOM-32_AT_V1.1.2 заходим в неё и там куча всего. Есть два варианта как обновить прошивку сложный и простой. Сложный это собрать прошивку из файлов расположенных по разным адресам, адреса записаны в файле download.config. Но нам напрягаться нельзя! Поэтому выбираем простой метод берем файл factory.bin это полная копия прошивки с учетом флэшки в 32 Мбита.
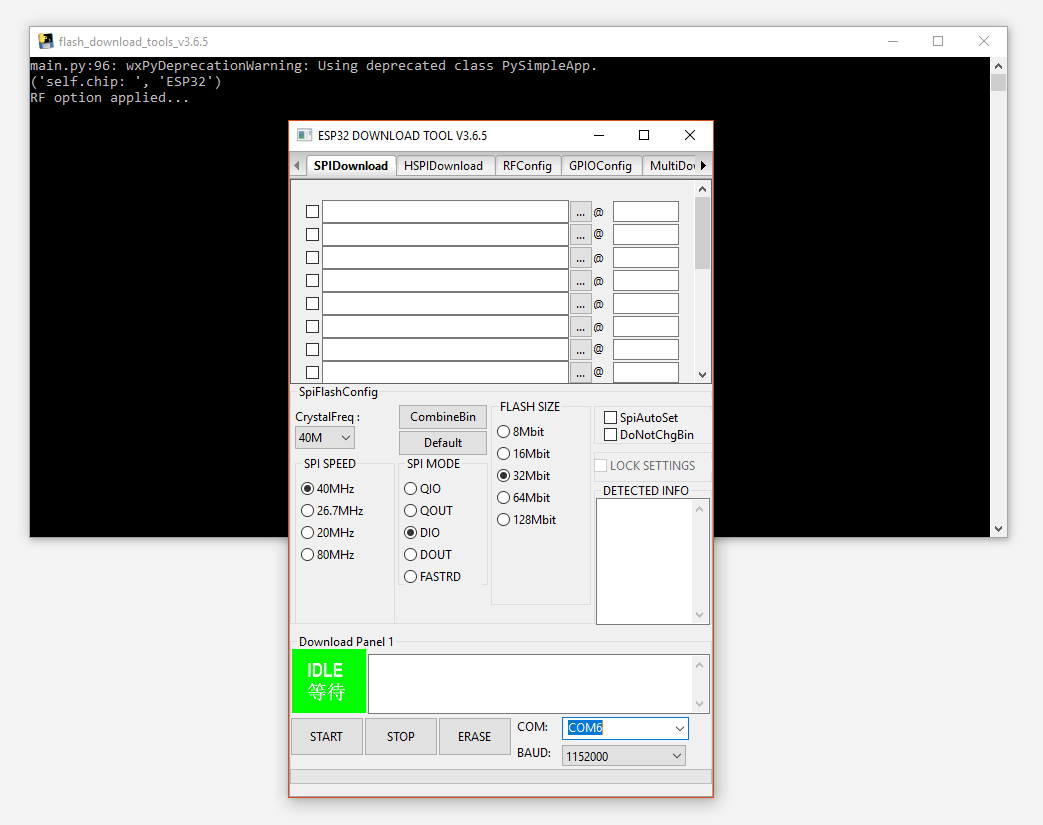
Запустим программу Flash Download Tools
 Выберем инструменты загрузки ESP32
Выберем инструменты загрузки ESP32

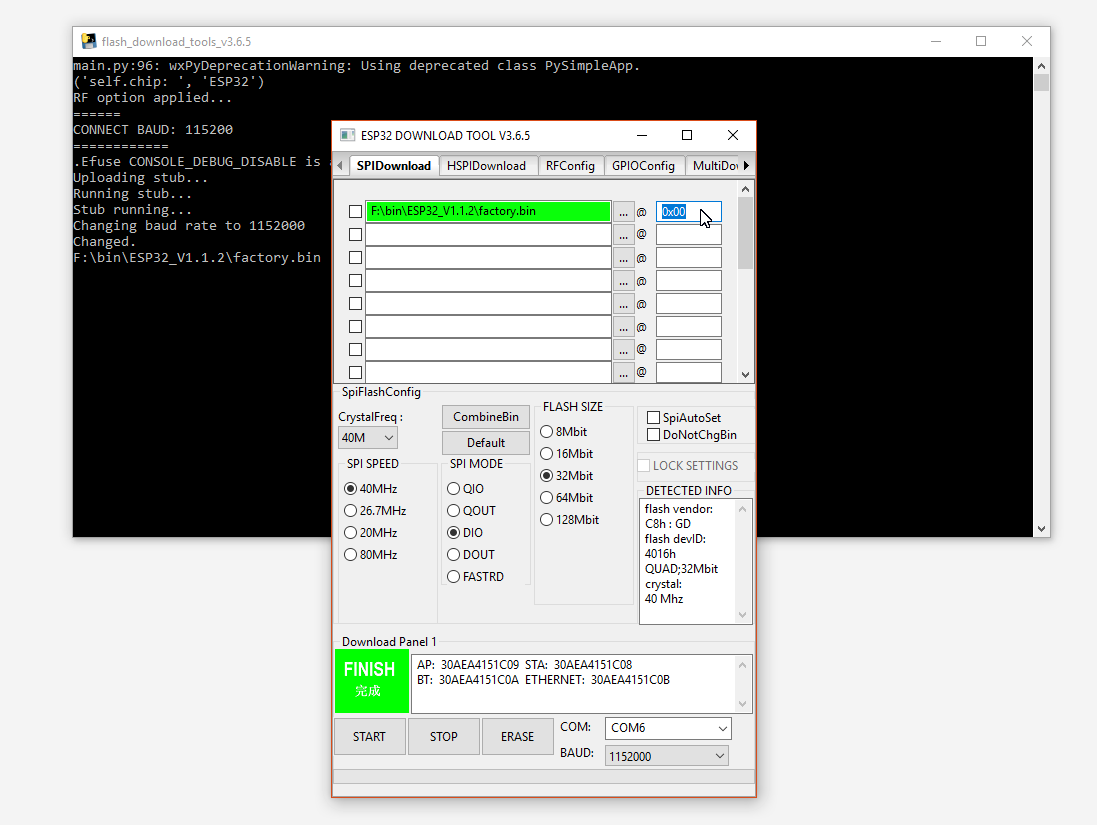
У нас откроется панель инструментов, подключим нашу демоплату, как описано выше и выберем компорт, с который связан с USB-мост на плате (у меня это COM6). Скорость как и для ESP8266 устанавливаем максимальную 11152000 (1,2 Мбит). У ESP в бутлоадере используется автобанд, определитель скорости, а сама программа использует последовательности для настройки скорости. Чем выше скорость тем быстрее перепрошивка модуля.
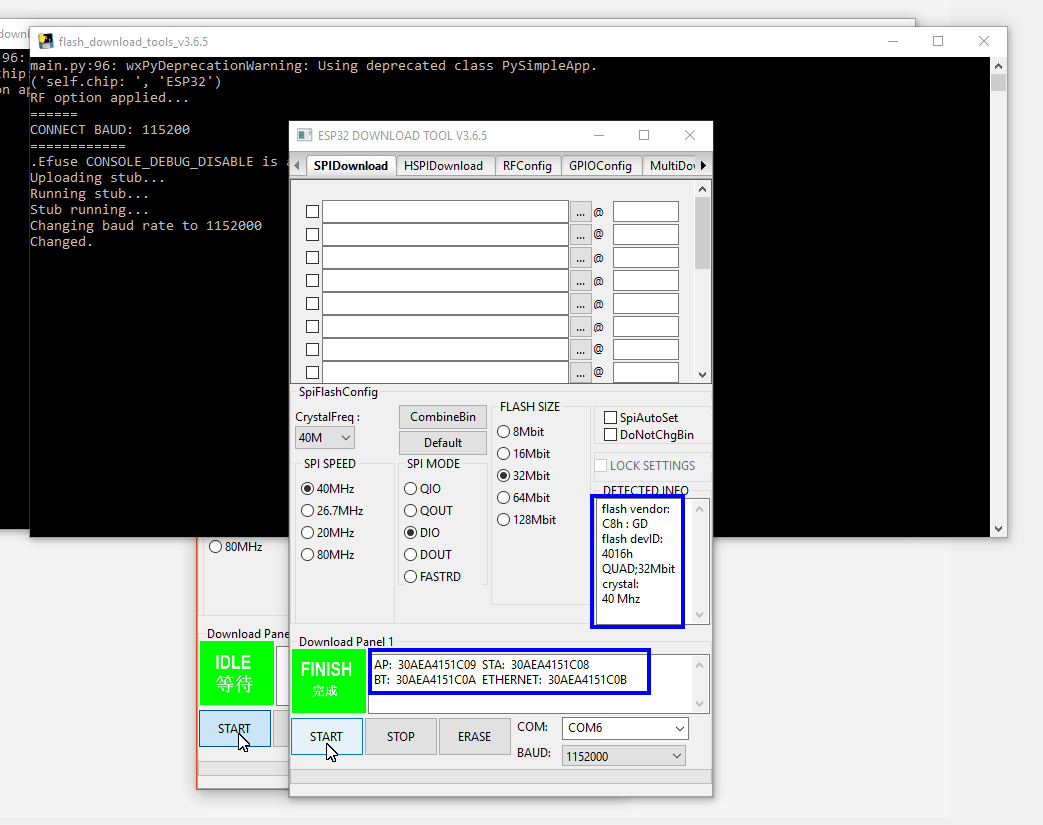
Проверим соединение с модулем, нажмем клавишу START, если связь установлена корректно, то будут прочитаны параметры модуля
Теперь нам необходимо указать место где находиться наш файл factory.bin. Нажмет
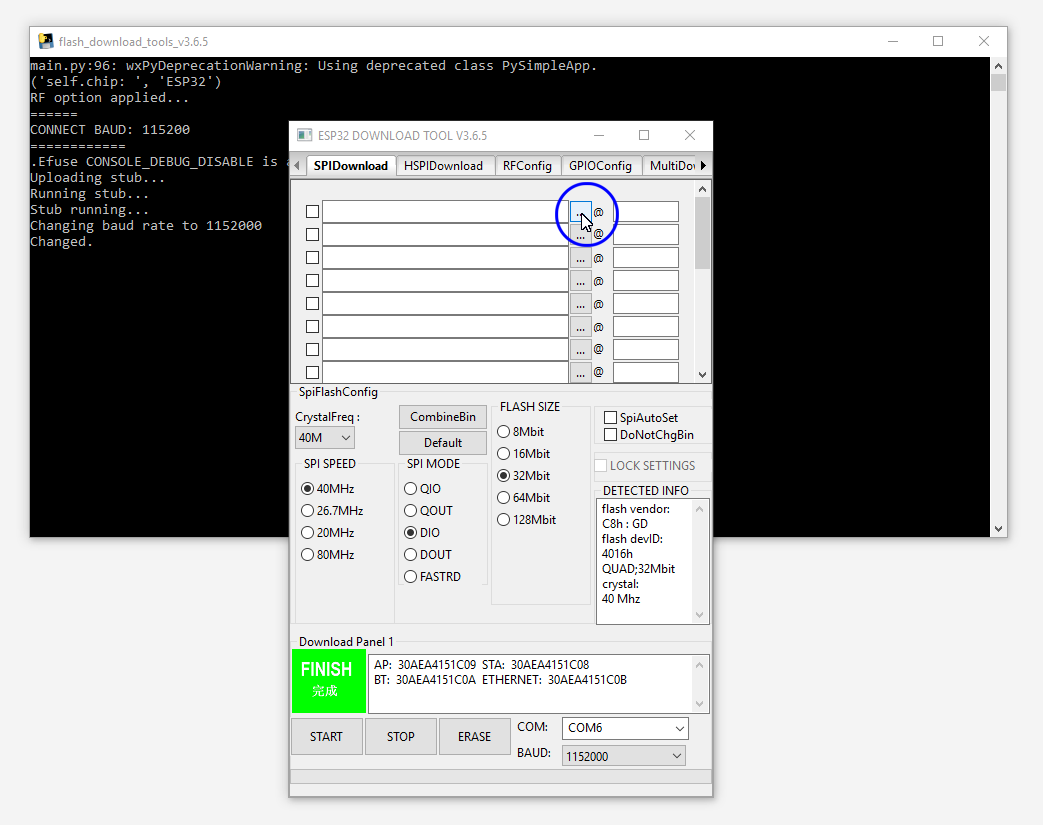
Выберем файл.
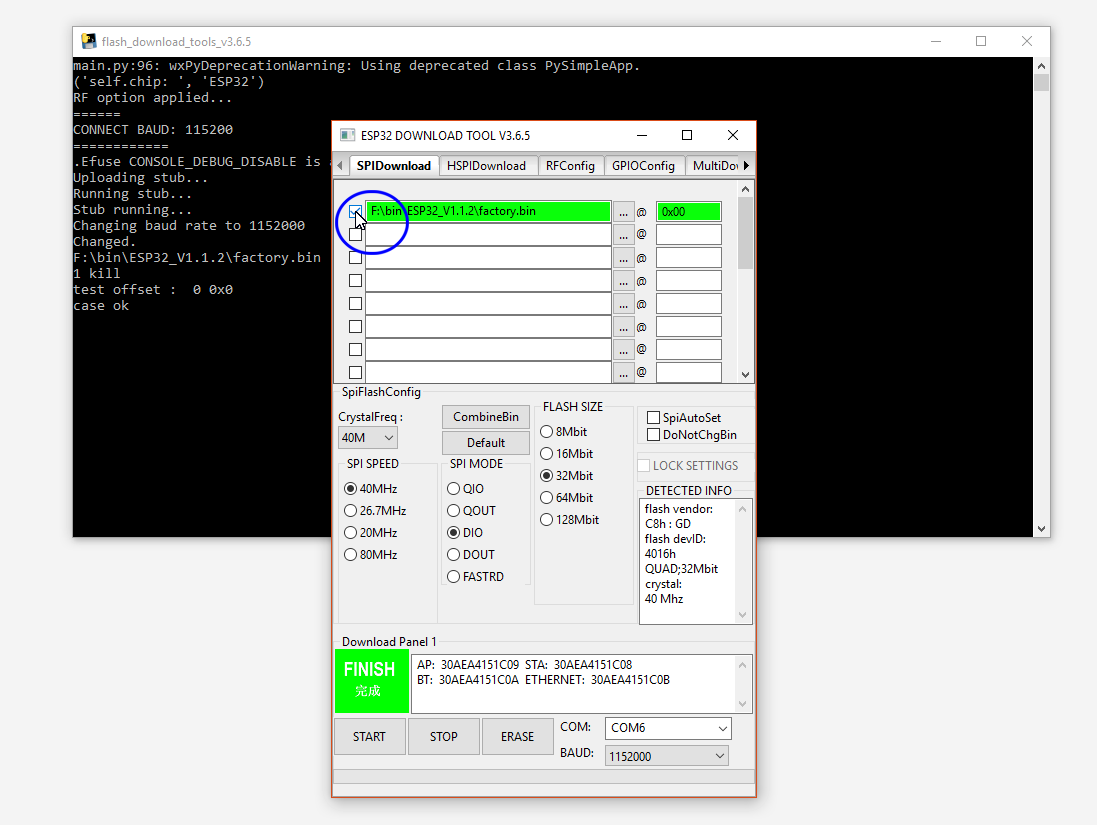
Адрес загрузки укажем 0x00.
Не забудьте поставить птичку.
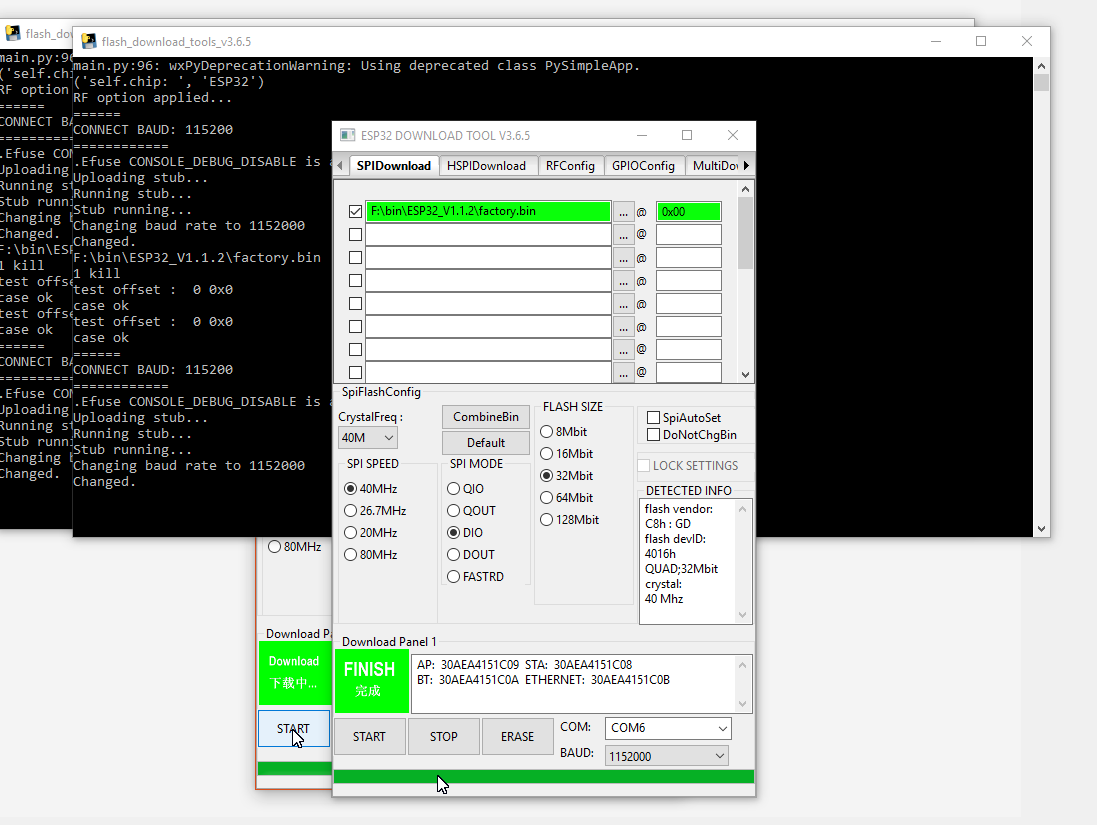
Теперь жмем кнопку START и ждем секунд 30, перепрошиваются все 32 Мб. По окончании процесса, вы увидите сообщение FINISH
 Процесс перепрошивки можно конечно ускорить, если прошивать, только “необходимые места”. Это конечно вариант для любителей, но он делается так. Необходимо отдельно загрузить и указать адреса, начала загрузки, для каждого файла, смотри таблицу ниже:
Процесс перепрошивки можно конечно ускорить, если прошивать, только “необходимые места”. Это конечно вариант для любителей, но он делается так. Необходимо отдельно загрузить и указать адреса, начала загрузки, для каждого файла, смотри таблицу ниже:
| ESP32 | |
| Адрес | Файл |
| 0x1000 | bootloader/bootloader.bin |
| 0x20000 | at_customize.bin |
| 0x21000 | customized_partitions/ble_data.bin |
| 0x24000 | customized_partitions/server_cert.bin |
| 0x26000 | customized_partitions/server_key.bin |
| 0x28000 | customized_partitions/server_ca.bin |
| 0x2a000 | customized_partitions/client_cert.bin |
| 0x2c000 | customized_partitions/client_key.bin |
| 0x2e000 | customized_partitions/client_ca.bin |
| 0xf000 | phy_init_data.bin |
| 0x100000 | esp-at.bin |
| 0x8000 | partitions_at.bin |
Картинка должна быть где то такая, слева файл, справа адрес.
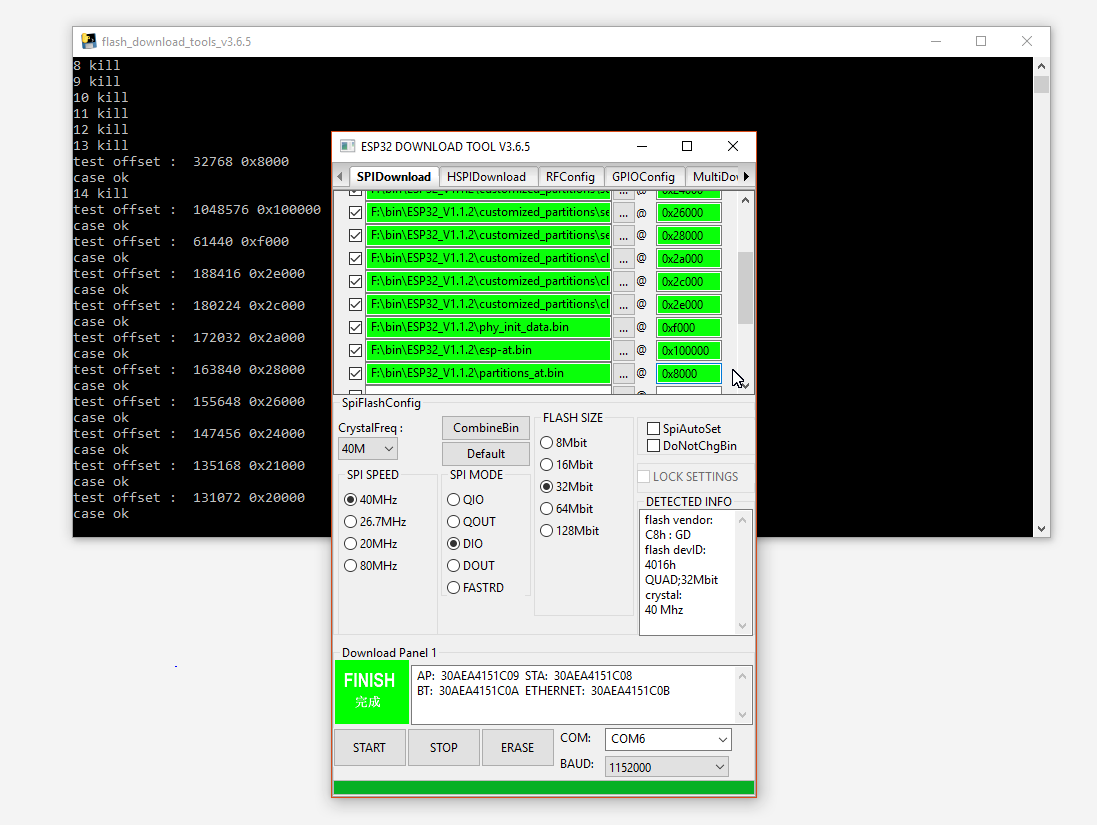
Нажмем START для программирования, в этом случае время перепрошивки занимает не более 10 секунд!!!
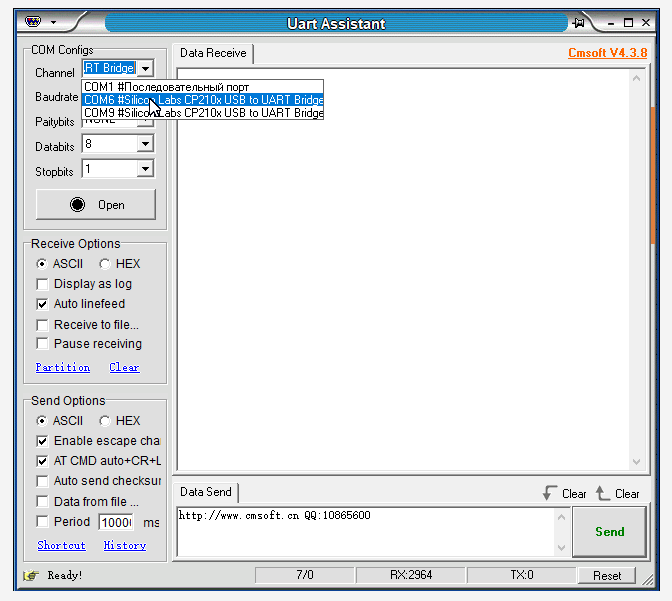
Проверка работоспособности! Для этого загрузим программу UartAssist.exe. Выберем тот же порт который использовался для программирования, скорость 115200 и нажмем кнопку OPEN, это необходимо для перезапуск прошивки в “горячем состоянии”.
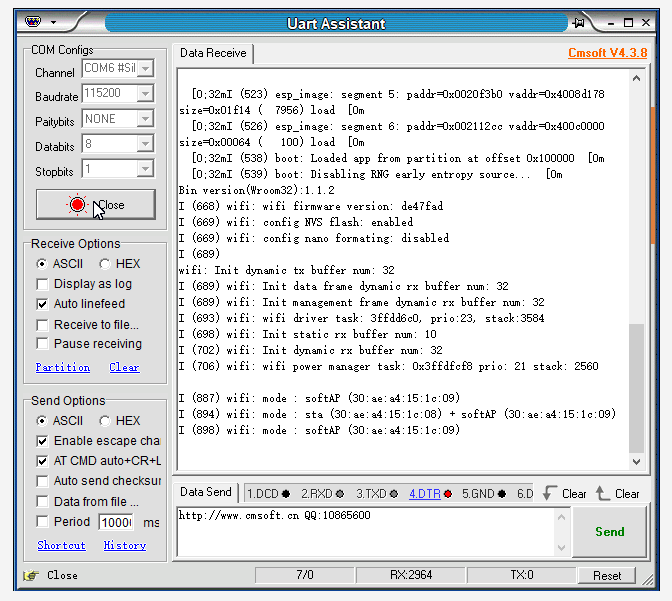
ESP32 выбросит в компорт все свои параметры:
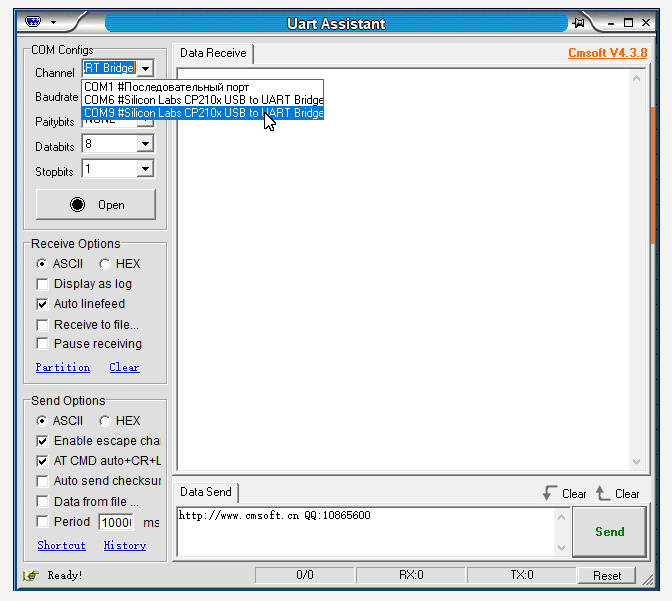
Отсоединимся от компорта, нажмем кнопку CLOSE. И выберем порт который подключен к нашему второму USB-мосту, (у меня это COM9).
Нажмем кнопку OPEN, введем AT-команду AT+GMR и получит сообщение о текущей версии прошивки:
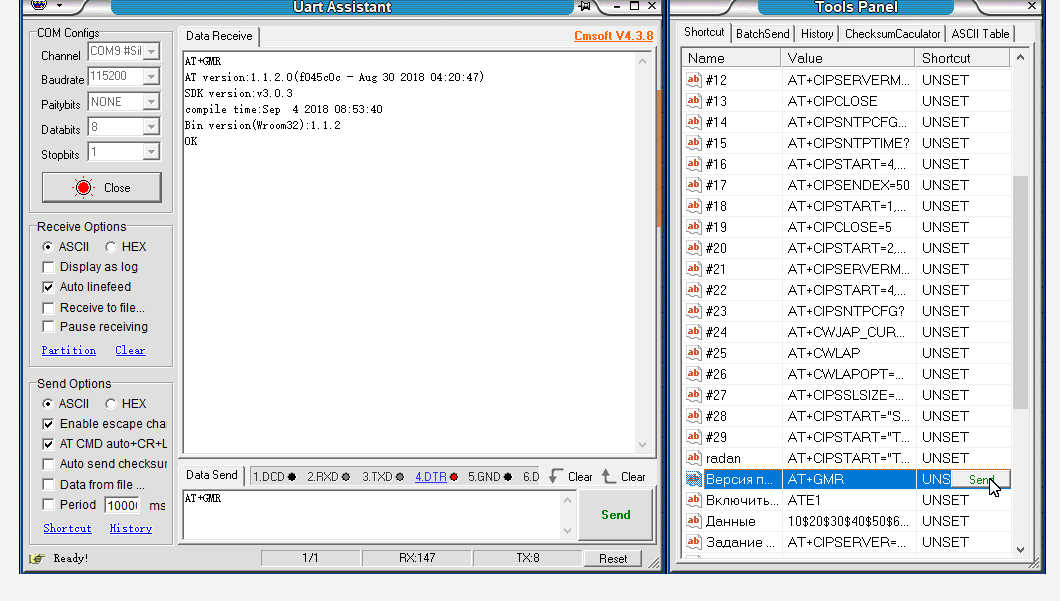
AT+GMR AT version:1.1.2.0(f045c0c - Aug 30 2018 04:20:47) SDK version:v3.0.3 compile time:Sep 4 2018 08:53:40 Bin version(Wroom32):1.1.2 OK
Прошивка модуля обновлена!!
У меня часто используемые команды уже прописаны в Shorcut программы UartAssist.
Считаю для первого знакомства достаточно! Удачи!
Это может быть интересно
 LM317 и светодиодыViews: 8065 LM317 и светодиоды статья с переработанная с сайта http://invent-systems.narod.ru/LM317.htm Долговечность светодиодов определяется качеством изготовления кристалла, а для белых светодиодов еще и качеством люминофора. В процессе эксплуатации скорость деградации кристалла …
LM317 и светодиодыViews: 8065 LM317 и светодиоды статья с переработанная с сайта http://invent-systems.narod.ru/LM317.htm Долговечность светодиодов определяется качеством изготовления кристалла, а для белых светодиодов еще и качеством люминофора. В процессе эксплуатации скорость деградации кристалла … MCC – K42 – настройка модуля DMAViews: 907 MCC – в версии v.3.95.0 и начиная ядра 4.85.0 конфигуратор предоставляет графический интерфейс для настройки модуля DMA. Для начала: Посмотреть какая версия МСС можно в закладке версии, если …
MCC – K42 – настройка модуля DMAViews: 907 MCC – в версии v.3.95.0 и начиная ядра 4.85.0 конфигуратор предоставляет графический интерфейс для настройки модуля DMA. Для начала: Посмотреть какая версия МСС можно в закладке версии, если … Temperature measurement with NTC thermistor.Views: 534 Проекты в которых присутствовало измерение температуры начинал с цифровых датчиков, т.к. в них все просто и не надо ничего преобразовывать и вычислять. При использовании цифровых датчиков ты получаешь …
Temperature measurement with NTC thermistor.Views: 534 Проекты в которых присутствовало измерение температуры начинал с цифровых датчиков, т.к. в них все просто и не надо ничего преобразовывать и вычислять. При использовании цифровых датчиков ты получаешь … OLED RET012864E/REX012864JViews: 1566 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как …
OLED RET012864E/REX012864JViews: 1566 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как … AD9833 – Programmable Waveform GeneratorViews: 2965 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить …
AD9833 – Programmable Waveform GeneratorViews: 2965 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить … Часы + Календарь + Термометр + …Views: 2765 Часы + Календарь + Термометр + Индикатор влажности + Секундомер + Дистанционное управление на ИК лучах (пульты на RC-5 протоколе) + Автоматическая регулировка яркости + Возможность вывода данных через USB, …
Часы + Календарь + Термометр + …Views: 2765 Часы + Календарь + Термометр + Индикатор влажности + Секундомер + Дистанционное управление на ИК лучах (пульты на RC-5 протоколе) + Автоматическая регулировка яркости + Возможность вывода данных через USB, … PIC18 – модуль DMAViews: 1283 Введение Модуль прямого доступа к памяти (DMA) предназначен для обслуживания передачи данных непосредственно между различными областями памяти без вмешательства процессора. Исключив при этом необходимость в интенсивной обработки …
PIC18 – модуль DMAViews: 1283 Введение Модуль прямого доступа к памяти (DMA) предназначен для обслуживания передачи данных непосредственно между различными областями памяти без вмешательства процессора. Исключив при этом необходимость в интенсивной обработки … Altium Designer my setup system and project structure V23.3Views: 275 Оновлення бази даних та шаблонів від березня 2023 року. Updating the database and templates from March 2023. Altium Designer my Libraries, Project templates, System settings by Catcatcat. Дивись …
Altium Designer my setup system and project structure V23.3Views: 275 Оновлення бази даних та шаблонів від березня 2023 року. Updating the database and templates from March 2023. Altium Designer my Libraries, Project templates, System settings by Catcatcat. Дивись …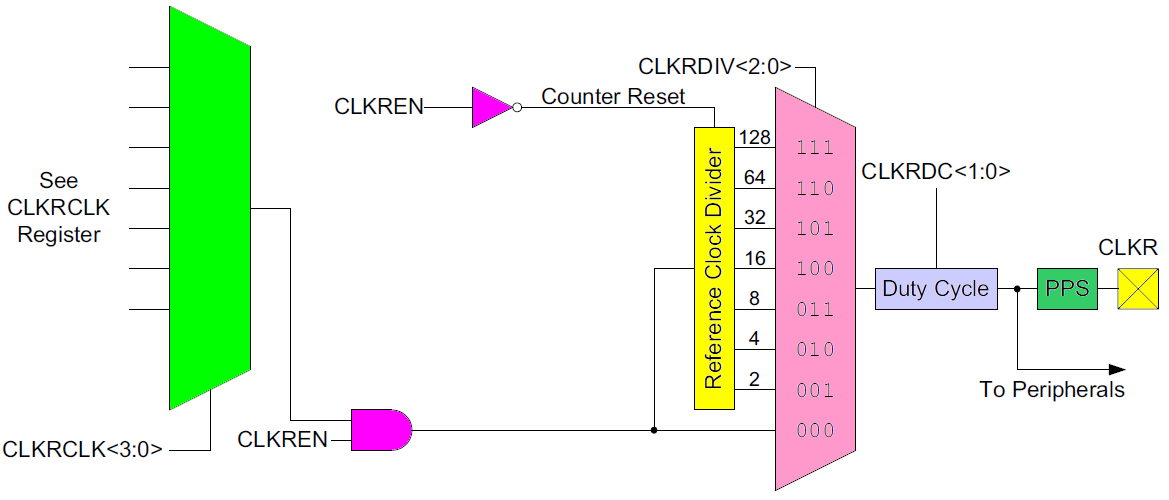 REFERENCE CLOCK OUTPUT MODULEViews: 530 REFERENCE CLOCK OUTPUT MODULE Модуль формирования опорного тактового сигнала Модуль опорного тактового сигнала обеспечивает возможность посылать сигнал синхронизации на тактовый опорный выходной контакт или контакты (CLKR) в зависимости от …
REFERENCE CLOCK OUTPUT MODULEViews: 530 REFERENCE CLOCK OUTPUT MODULE Модуль формирования опорного тактового сигнала Модуль опорного тактового сигнала обеспечивает возможность посылать сигнал синхронизации на тактовый опорный выходной контакт или контакты (CLKR) в зависимости от …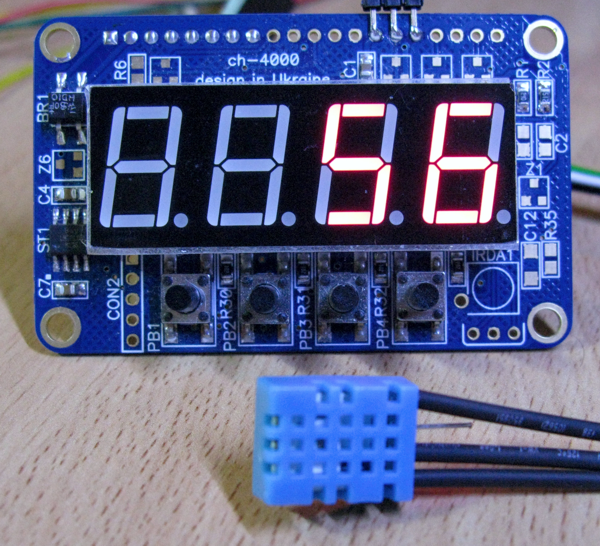 ch-4060 – регулятор температуры и влажности на датчике DHT11/DHT22/AM2302Views: 2469 На плате ch-4000 очень легко собрать устройство регулятора температуры и влажности. Датчик DHT11 самый недорогой вариант для создания такого устройства, правда точность его не велика, но для бытовых устройств …
ch-4060 – регулятор температуры и влажности на датчике DHT11/DHT22/AM2302Views: 2469 На плате ch-4000 очень легко собрать устройство регулятора температуры и влажности. Датчик DHT11 самый недорогой вариант для создания такого устройства, правда точность его не велика, но для бытовых устройств …
Комментарии